基于OBE理念的无人驾驶车辆课程实验平台设计
2019-12-27熊光明龚建伟陈慧岩
熊光明,龚建伟,陈慧岩
基于OBE理念的无人驾驶车辆课程实验平台设计
熊光明,龚建伟,陈慧岩
(北京理工大学 机械与车辆学院,北京 100081)
无人驾驶车辆课程是面向车辆工程专业开设的专业课。针对该课程研究制定了基于OBE 理念的课程培养目标和教学大纲,以及相应的实验教学内容和课时分配。为了使学生根据需要进行分阶段学习,设计了基于PreScan的仿真实验平台、基于V-REP的仿真实验平台和实车实验平台,使学生能够将理论与实践结合起来,从而达到教学大纲要求的学习效果。
基于学习产出的教育模式;无人驾驶车辆;教学实验平台
智能车辆技术发展如火如荼,随之而来相关人才紧缺问题日益凸显。我校机械工程2016版硕士研究生培养方案中增设了智能车辆相关课程[1],并于2017年、2018年度进行了课程教学实践。
目前,在车辆工程本科生培养方案中,也增设了无人驾驶车辆课程。按照学校要求,新增设课程应全面落实“学生中心、产出导向、持续改进”的理念,关注学习成效,持续提升人才培养水平。本课程组在智能车辆研究生课程教学实践基础上,按照OBE[2-4]的理念,承担了2018年我校教育教学改革专项——基于ILOs的无人驾驶车辆本科生课程建设,并开展了相关工作。
1 基于OBE的无人驾驶车辆教学大纲设计
OBE课程的关键是学生的参与度和学生的积极性。在教学策略方面,强调实施“研究型教学模式和个性化教学”,以学生预期能力的达成为导向[5-7],给学生期望与动力,并给他们提供努力的框架与方向;强调采用多元和梯次的评价标准对学生进行“个性化”评价。我校在车辆工程本科生培养方案中,增加了电动汽车、智能汽车2个专业课模块,在每个模块中设立多门相关课程,其中智能汽车模块包括无人驾驶车辆课程。车辆工程本科生培养方案,对毕业要求(指标点)作出了明确的规定。
根据OBE理念,研究制定了无人驾驶车辆课程教学大纲,疏理出无人驾驶车辆课程关键知识点,对课程教学目标与教学效果评价进行了详尽的分类描述。
无人驾驶车辆课程共有8个教学子目标,表1是对其中一个子目标及其教学效果评价的描述。
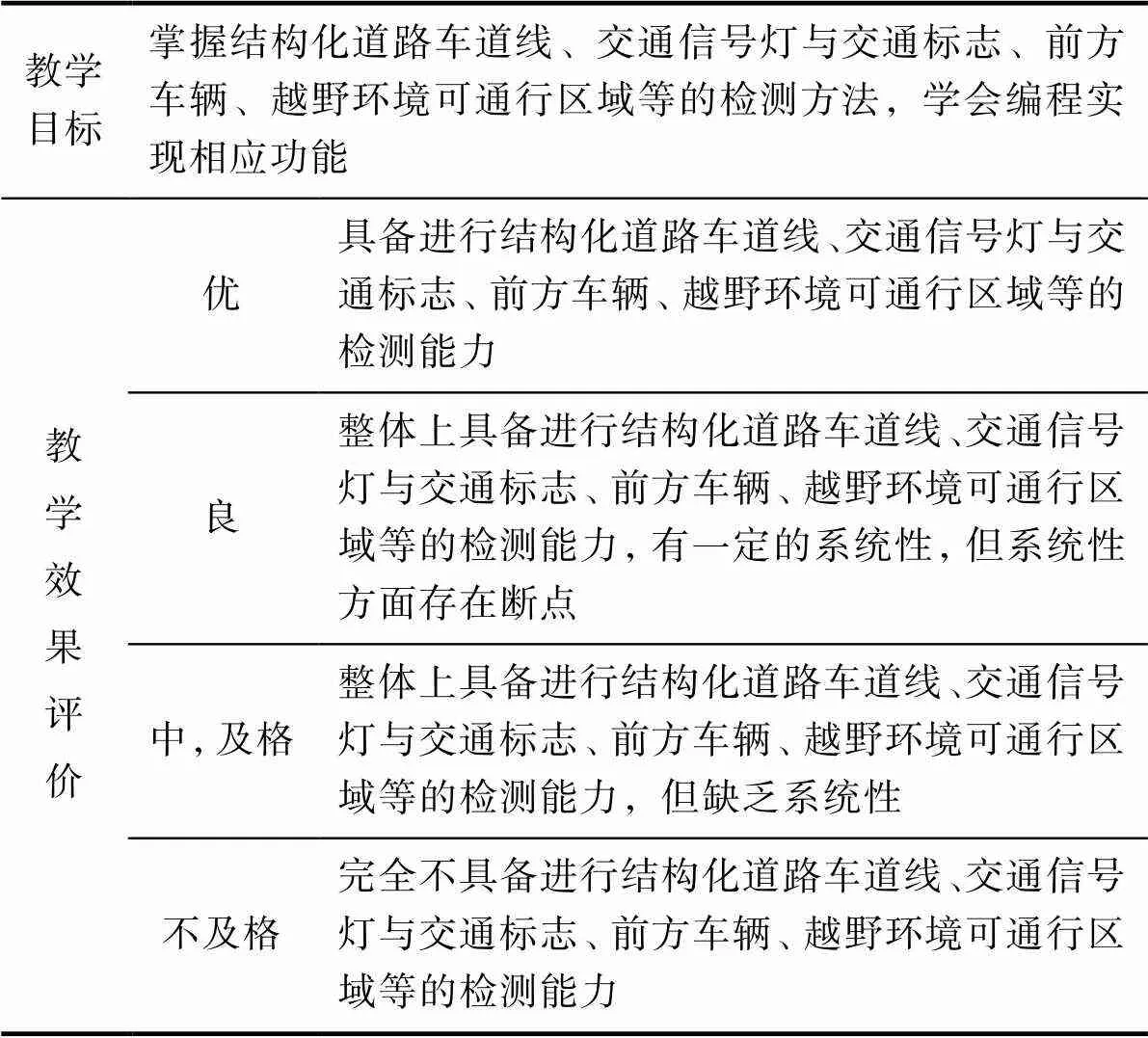
表1 课程教学目标与教学效果评价
按照OBE理念,无人驾驶车辆课程教学大纲还明确了课程教学目标与所支撑的毕业要求的对应关系,如表2所示。
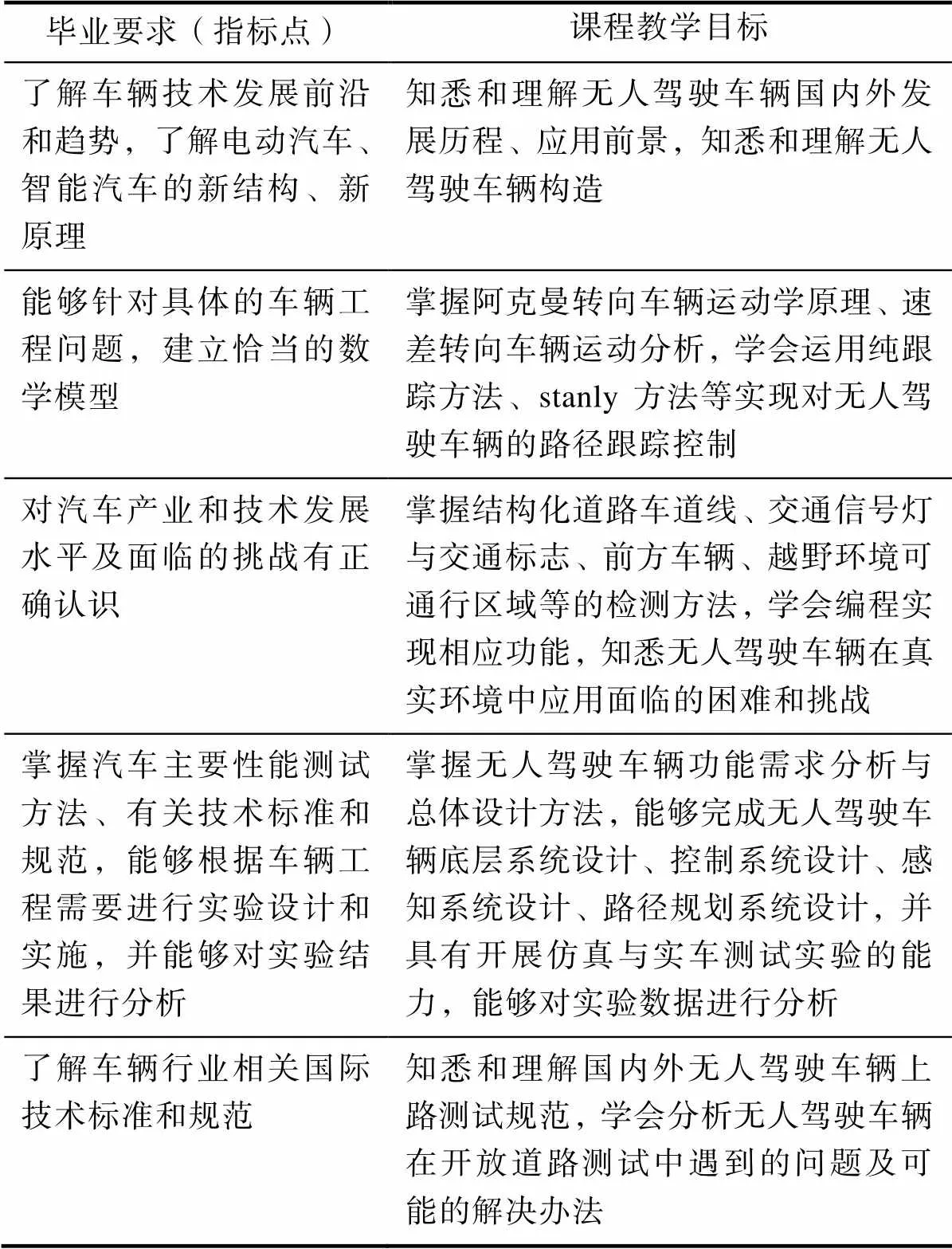
表2 教学目标与所支撑的毕业要求
2 实验内容与课时分配
无人驾驶车辆课程是面向车辆工程专业开设的专业课程,要求学生具有比较扎实的控制理论、车辆理论、计算机基础、数学和编程操作等知识和能力。课程涉及面广、知识点难度大,且注重编程操作练习,仅靠理论教学是无法使学生掌握无人驾驶车辆理论与设计方法的[8]。
无人驾驶车辆的开发通常采用V循环研发理念,通过将仿真设计、实车验证、离线场景再现3个阶段相结合,验证设计方案的可行性。在仿真设计阶段,可以通过仿真平台和编程软件,对开发任务进行定义、设计和验证,用于指导之后的实车验证。在设计实验平台时,一般要求平台各功能模块相对独立,方便学生分阶段进行有针对性的学习[9]。为此,在32学时的课程中,安排了10学时的实际操作训练,具体安排如图1所示,包括基于PreScan仿真平台的实验5学时、基于V-REP仿真平台的实验3学时和实车实验2学时。
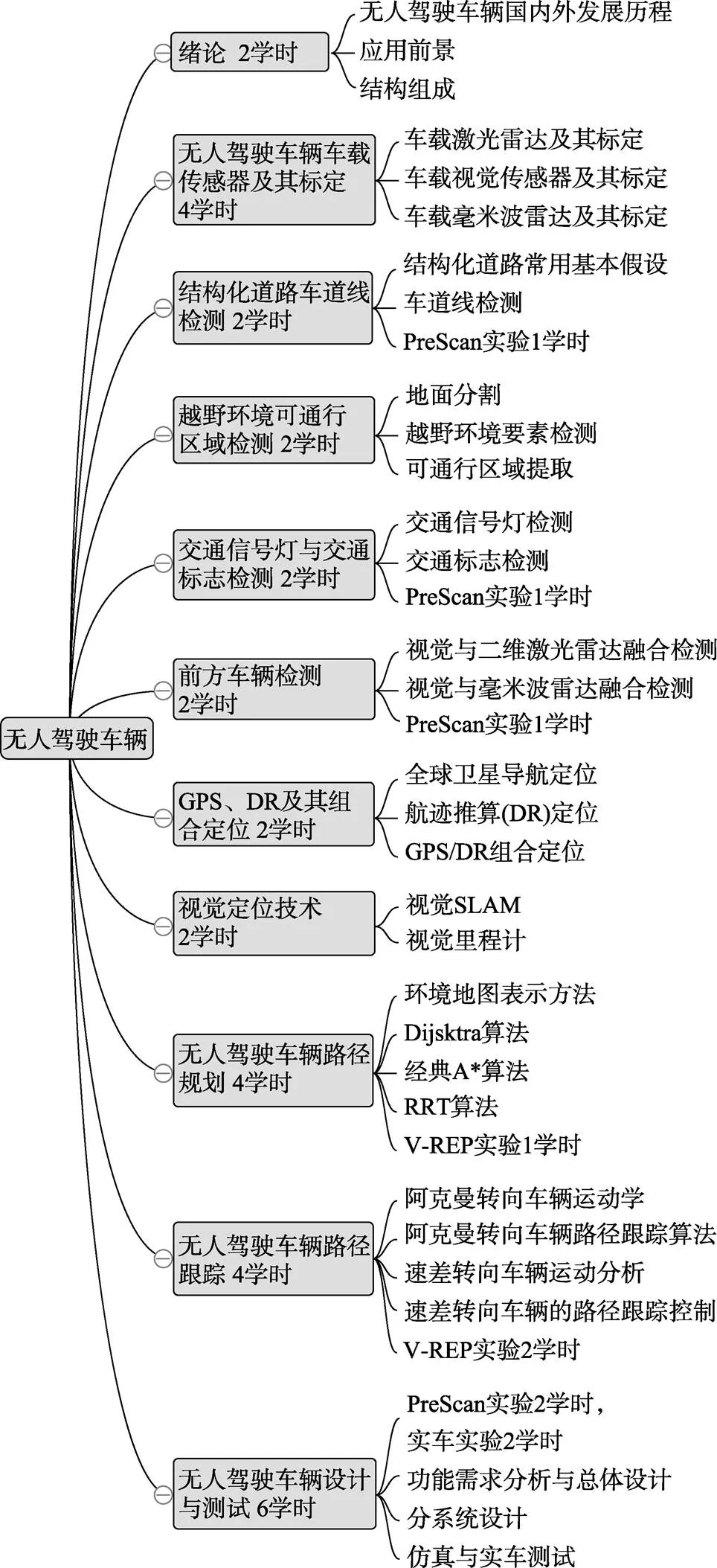
图1 课程内容学时安排
3 基于PreScan的仿真实验设计
PreScan仿真平台的设计主要有交通场景建模、车辆数学建模及车载传感器配置、车辆控制系统建模和运行仿真4个步骤,可以用来预测和仿真车辆对外界环境的感知、车辆碰撞检测以及对车车/车路通信进行性能评价等[10]。为开展该仿真实验,建立了相应的实验系统,包括Matlab/Simulink程序界面、PreScan工作界面和仿真运行界面。
运用基于PreScan的仿真实验平台,可以让学生根据课堂上学到的理论知识,在Matlab/Simulink中搭建模型并编写程序,用传统方法实现车道线检测和车辆/行人检测,并根据这些基本能力实现自动紧急制动、自适应巡航控制、车道线保持、换道等功能。
为了检验学生对综合知识的运用,搭建了图2所示的交通实验场景:行人被货车完全遮挡,未进入车辆视野;车辆的运动方向为沿车道线直线行驶;遮挡车辆停在路口等待左转;行人从遮挡车辆前方冲出,横穿马路。让学生根据这一场景完成基于V2X的遮挡环境下行人避撞系统设计及编程实现。
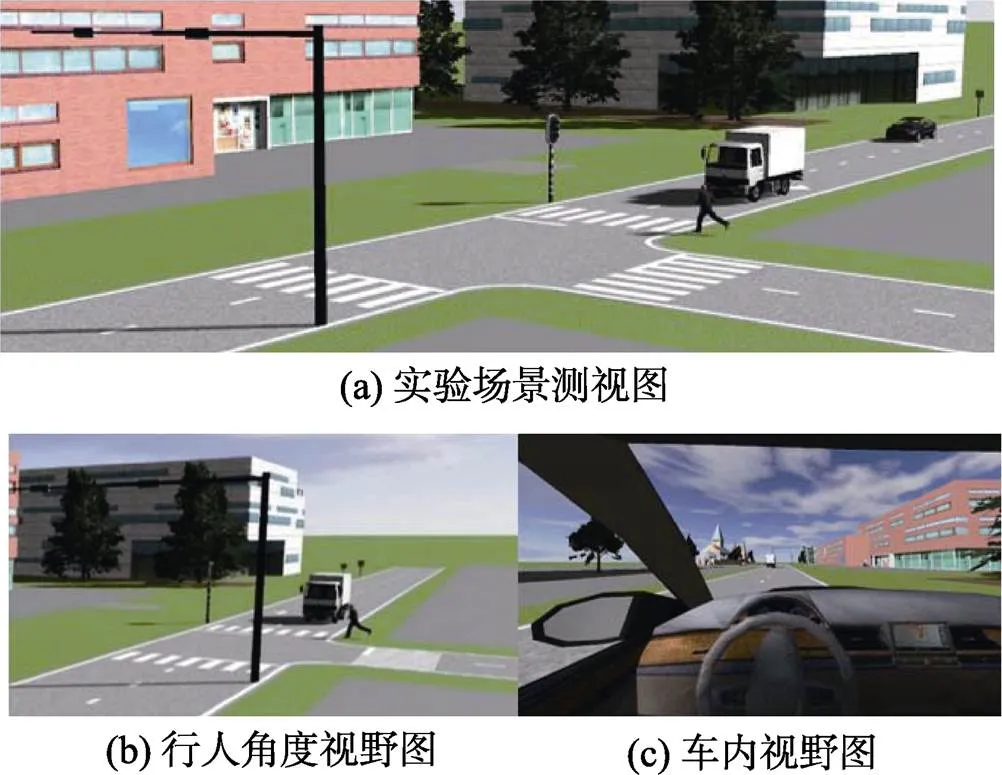
图2 交通实验场景
课程安排了深度学习在无人驾驶车辆应用的教学内容。PreScan软件具有交通场景建模能力,交通场景的背景、天气、光照等均可自行设置,为实验教学中大量交通场景数据的采集提供了思路。以检测交通限速标志(见图3)为例,运用基于PreScan的仿真实验平台,可以采集大量不同车速、不同距离、不同背景条件下的交通场景数据,用以作为深度学习训练所需的样本数据。从采集数据、数据预处理环节开始,学生就可参与进来,接着是建立模型、训练模型、集中测试等全过程,使学生知其然更知其所以然,增强了学生的参与感和获得感。

图3 交通限速标志
4 基于V-REP的仿真实验设计
基于V-REP(virtual robot experimentation platform)的仿真实验平台设计主要包括环境搭建、控制体添加、脚本编写和仿真运行。V-REP可以独立进行仿真,但为了方便进行数值计算和算法设计,也可借助Visual Studio、Matlab等软件与V-REP进行联合仿真[11]。
4.1 设置Matlab与V-REP的通信
在Matlab中加载V-REP的库文件,可以方便地在Matlab中使用V-REP的库函数。
在V-REP端:
simExtRemoteApiStart(5050,250,false,false)
在指定的端口服务器上启动一个临时的远程API服务器。
在Matlab端:
V-REP=remApi('remoteApi'); %加载库文件
V-REP.simxFinish(–1); % 关闭所有连接
clientID=V-REP.simxStart('127.0.0.1',5050,true,true,500,CommThreadCycleInMs);
启用与服务器的通信,在成功连接之前保持等待。
4.2 在V-REP中搭建场景和模型
结构化道路场景包括直道、弯道、路口、停车场和路肩等元素。首先使用作图软件绘制出这些元素的图片素材;在V-REP中绘制想要的道路形状实体;把图片素材添加上去并调整到合适的位置;完成场景的搭建。
根据车辆运动特点搭建车辆基本框架,包括发生动力学关系的车身和车轮,以及产生运动的关节。为使模型中的车辆更加逼真,可使用三维建模软件绘制车身和车轮,将三维模型导入V-REP中,完成车辆模型的搭建。
4.3 在V-REP中编写控制脚本
在V-REP中编写脚本,接收控制命令,设置目标关节的速度和转角。所建立的Matlab/V-REP联合仿真平台如图4所示。
4.4 在Matlab中编写控制程序
利用设计好的基于V-REP的可视化仿真实验平台,学生可根据学到的理论知识,在Matlab中编写路径规划和路径跟踪程序、进行运行仿真实验等。通过该平台,可以直观地看到无人车辆按照所编写的程序的运行结果,通过编写不同程序或修改参数,可实时看到不同的运行效果
。
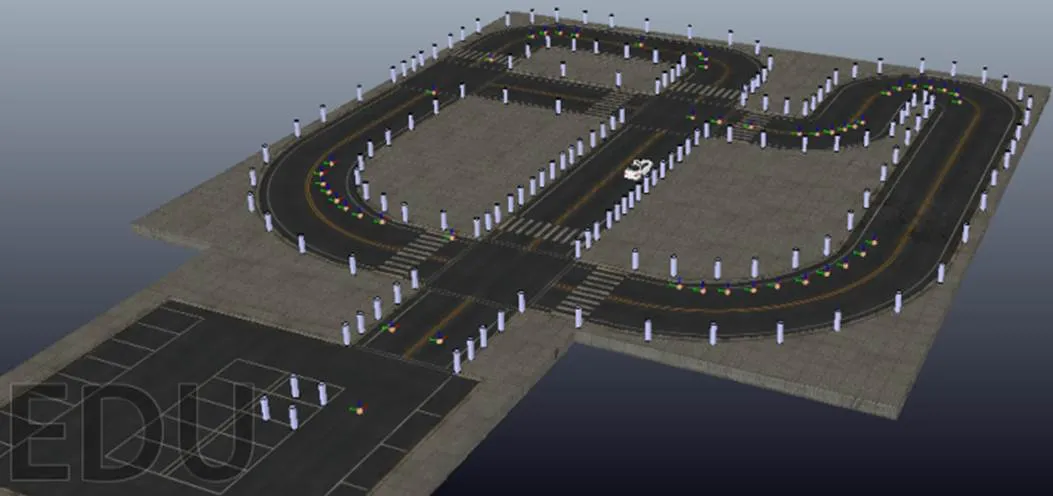
图4 Matlab/V-REP联合仿真平台
5 实车实验设计
图5为课程组研制的Ray无人驾驶汽车。该车采用一体化设计方法,并通过总线实现了对车辆电控化底层执行单元的控制,实现了对汽车电动助力转向系统、发动机电控、自动变速器、电动驻车制动、组合仪表和灯光的协调控制[12],获得第五届“中国智能车未来挑战赛”第一名。该无人车用作本课程的实车实验用车。车前安装有毫米波雷达和单线激光雷达,车顶安装有32线激光雷达和双目视觉。学生结合该实际的无人车辆,可以对车辆的功能需求、总体设计、分系统设计、无人车实车测试等内容展开讨论,并可把仿真实验中的相关算法,如车道线检测、车辆/行人检测、路径规划、路径跟踪等,通过修改移植,在实车上进行测试。

图5 实车平台
6 结语
制定了基于OBE理念的本科生无人驾驶车辆教学大纲,明确了课程教学目标与教学效果评价以及课程教学目标与所支撑的毕业要求指标点的对应关系。学生在理论知识学习之后,再通过所设计的实验项目进行编程实践练习(包括仿真环节和实车环节),使学生的学习不只停留在理论阶段,而是在实践中升华。这种方式能激发学生的学习兴趣和成就感,从而使学生对课程有更加深入的理解,进而达到教学大纲要求的预期学习效果。
[1] 陈慧岩,熊光明,龚建伟,等.智能车辆理论与应用[M].北京:北京理工大学出版社,2018.
[2] 武立华, 刘志海, 张杨,等.基于OBE理念的大学物理实验教学体系探索[J].实验技术与管理,2018, 35(10): 188–189, 196.
[3] 吴秋凤,李洪侠,沈杨.基于OBE视角的高等工程类专业教学改革研究[J].教育探索,2016(5): 97–100.
[4] 宋跃,余炽业,胡胜,等.基于OBE的嵌入式测控技术课程群建设与探索[J].实验室研究与探索,2016, 35(6): 208–210, 283.
[5] 吴立烜,黄中祥.“预期学习结果”驱动体系在交通工程专业设计类课程中的应用[J].浙江交通职业技术学院学报,2016, 17(1): 51–55.
[6] 弓云峰,左敬龙,崔得龙.基于OBE模式的通信原理课程教学改革与探索[J].课程教育研究,2016(5): 249.
[7] 王开丽.基于学习结果(OBE)的工程教育模式在Java面向对象程序设计教学中的应用[J].电脑知识与技术,2018, 14(13): 93–94.
[8] 贺云涛,王正平,张晓辉.多电混合动力与能源管理教学实验平台建设[J].实验技术与管理,2018, 35(10): 174–176, 184.
[9] 沈刚,蔡强,丁兴亚,等.基于物联网的汽车智能防盗系统实验教学平台设计[J].实验技术与管理,2018, 35(10): 133–135.
[10] HENDRIKS F, TIDEMAN M, PELDERS R, et al. Development tools for active safety systems: Prescan and VeHIL[C]// Vehicular Electronics and Safety (ICVES), 2010 IEEE International Conference on, 2010: 54–58.
[11] 陈慧岩,熊光明,龚建伟.无人驾驶车辆理论与设计[M].北京:北京理工大学出版社,2018.
[12] 陈慧岩,熊光明,龚建伟,等.无人驾驶汽车概论[M].北京:北京理工大学出版社,2014.
Design of driverless vehicle course experimental platform based on OBE idea
XIONG Guangming, GONG Jianwei, CHEN Huiyan
(School of Mechanical Engineering, Beijing Institute of Technology, Beijing 100081, China)
The Driverless Vehicle course is a professional course for the Vehicle Engineering major. Based on the research of this course, the objective and syllabus of course training based on OBE (outcome-based education) idea are formulated as well as the corresponding experimental teaching content and class time allocation. For students to learn in stages according to their needs, a simulation experiment platform based on PreScan, a simulation experiment platform based on V-REP and a real vehicle experiment platform are designed to enable students to combine theory with practice so as to achieve the learning effect required by the syllabus.
education model based on OBE; driverless vehicle; teaching experimental platform
TP391.9;G434
A
1002-4956(2019)12-0182-04
10.16791/j.cnki.sjg.2019.12.043
2019-03-22
北京理工大学教改项目(教[2018]98-9)
熊光明(1975—),男,江西高安,博士,副教授,主要从事智能车辆技术教学科研工作。E-mail: xiongguangming@bit.edu.cn
