基于改进预瞄驾驶员模型的车道保持系统
2019-12-27董婷
董婷
基于改进预瞄驾驶员模型的车道保持系统
董婷
(1.长安大学,陕西 西安 710018;2.中国汽车技术研究中心汽车工程研究院,天津 300300)
为提高车辆行驶的主动安全性,基于改进的单点预瞄最优曲率驾驶员模型,提出车道保持控制方法,并搭建Simulink控制模型,结合dSPACE ModelDesk/MotionDesk进行仿真实验。仿真结果表明,改进后的模型能够消除横向偏差,更好地跟随目标路径,使车辆保持在车道中心附近行驶。
驾驶员模型;车道保持;横向控制;目标路径
前言
目前主动安全技术成为全球的研究重点,其中车道保持辅助系统作为一项重要技术,对车辆实现横向主动干预,在车辆发生偏离时主动控制车辆回正到车道内,并保持在车道中心附近行驶,提高了车辆的行驶安全性。
常用的车道保持控制方法都是通过输入车辆-道路的横向位置偏差,利用各种反馈算法设计控制系统。Marino等设计嵌套PID控制器,通过输入横向位移误差输出横摆角速率,从而实现车道跟踪[1];Bae通过输入车道曲率和质心侧偏角控制前轮转角变化率实现路径跟踪[2]。
除此之外,单点预瞄驾驶员模型[3]应用甚广,较与其他算法,结构简单、运算量小,因此本文基于改进的单点预瞄驾驶员模型,将车辆当前状态以及预瞄位置处的横向偏差作为控制器的输入,得出理想的最优侧向加速度,根据侧向加速度误差得到目标方向盘转角,再对方向盘转角误差进行PID控制,从而输出控制力矩以保证车辆在车道中心附近行驶。
1 车道保持控制器设计
本文结合预瞄跟随原理与PID控制方法进行车辆的横向运动控制研究,完成横向控制器的设计,实现车道保持的目的,系统由横向位置控制器和转角控制器串联而成,如图1所示。

图1 车道保持控制器
横向位置控制器实现预瞄和跟随两个过程,以车辆偏航角、目标行驶轨迹、车速等参数作为控制器输入,输出目标方向盘转角。其中预瞄距离是影响跟随效果的主要因素,采用单点预瞄构建基于改进的最优预瞄驾驶员模型的横向位置控制器。转角控制器通过对方向盘转角误差进行PID控制,从而输出车道跟随力矩。
2 改进最优单点预瞄驾驶员模型
单点预瞄最优曲率驾驶员模型从数学上将控制理论、车辆和驾驶员特性等参数融合在一起,结构简单、跟随精度较高,能很好地模拟驾驶员行为。为简化问题,我们认为驾驶员对道路轨迹的跟踪就是对目标路径横向位移误差的跟踪,跟踪目的是使车辆的行驶轨迹与目标路径的误差最小,即遵循“最小误差原则”,如图2所示。

图2 驾驶员模型

假设汽车当前时刻在y方向做匀加速运动,经过预瞄时间T后,车辆的实际横向位移为:

期望行驶的目标路径的侧向位移为:fe=f(t+T)
根据“最小误差原则”,在时间T之后车辆的实际运动轨迹与期望轨迹一致,即:

联立(1)、(2)式,得到最优侧向加速度:

其中,y为预瞄横向误差,y=()(),可通过坐标转换得到。
在图2中,P点(X(),Y())为预瞄点坐标,C点是车辆中心,坐标为(X(),Y()),则:

方向盘转角与车辆侧向加速度的关系为:
其中,G为汽车的侧向加速度对方向盘转角的稳态增益,与车速的关系是:
式中:L为轴距,I是转向系角传动比,K为稳定性因数,一般取0.002~0.004s2/m2。
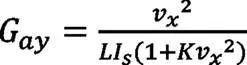
本文考虑驾驶员的反应滞后因素,在传统最优预瞄加速度驾驶员模型的基础上,考虑加速度反馈环节,对方向盘转角进行修正,从而得到改进的预瞄驾驶员模型[4],如图3所示。
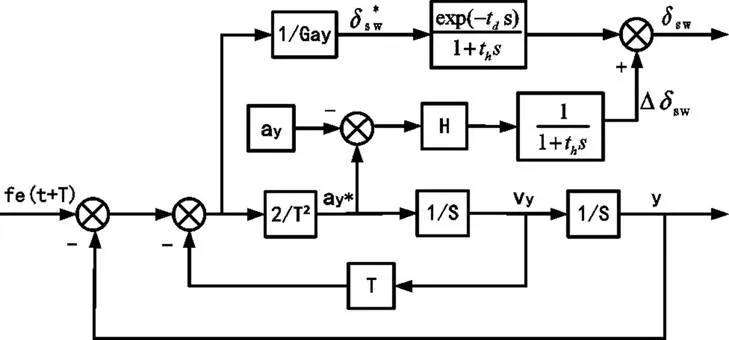
图3 改进的单点预瞄驾驶员模型
驾驶员的反应滞后包括神经反应滞后(exp(-ts))和动作反应滞后(1/(1+ts))两类,其中t表示神经反应滞后时间,一般取0.2~0.4s,动作反应滞后时间t取0.05~0.2s。
3 转角控制器
横向控制器的设计需要将方向盘转角转换为对车辆的输入,才能控制车辆的行驶。即转换为车道跟随力矩,作为电动助力转向系统的输入信号。
本文的转角控制器采用PID控制方法,通过对方向盘转角误差e进行PID控制,输出车道跟随力矩为t,实现对方向盘转角的跟踪控制。

4 仿真与分析
基于Matlab/Simulink软件搭建车道保持的控制器模型,并结合dSPACE ModelDesk/MotionDesk软件设置道路场景进行联合仿真,模拟驾驶员无意识驾驶车辆偏离至左右侧车道线的场景工况,观察车辆是否可以回正至车道中心,以验证控制器模型的有效型。
4.1 控制器模型参数的获取
方向盘转角反馈系数K、K、K需要在仿真过程中根据控制效果进行调整,由于系统具有一定的鲁棒性,可以在较大范围内取值都能达到较好的控制效果。
4.2 车道保持效果验证
图4 直线道路路径跟踪轨迹
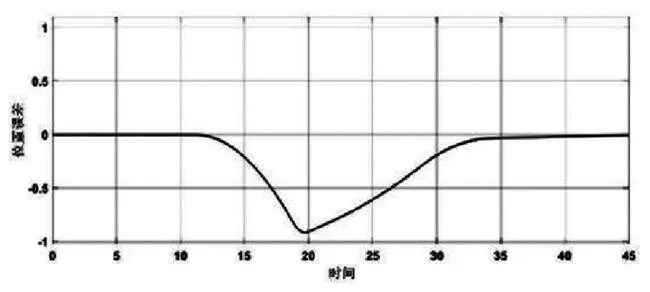
图5 直线道路跟踪位置误差

图6 直线道路跟踪航向角误差
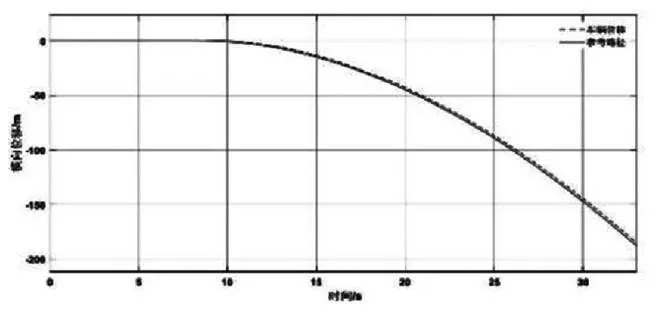
图7 曲线道路路径跟踪轨迹
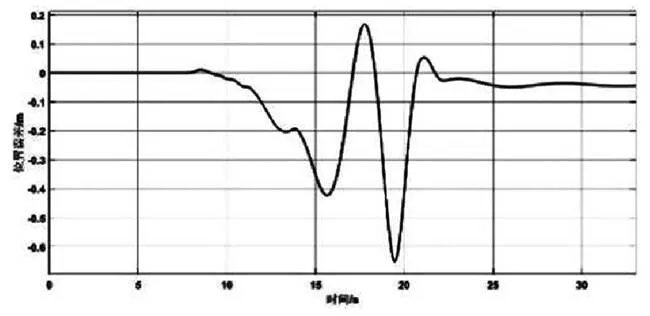
图8 曲线道路跟踪位置误差

图9 曲线道路跟踪航向角误差
本文选取试验车速为72km/h左右,试验道路分别选择四车道白色实线直线道路与曲率半径500m的四车道曲线道路,设置车辆模拟驾驶员脱离方向盘不干预车辆控制直至LKA控制偏离车辆回正至车道中心附近行驶一段时间,试验结果如图4-图9所示。
5 结论
(1)通过Simulink与dSPACE ModelDesk/MotionDesk联合仿真,证明改进的单点预瞄驾驶员模型能够较稳定地控制汽车进行轨迹跟踪,实现车道保持的功能。
(2)采用侧向加速度误差反馈的方式,对驾驶员模型中侧向加速度增益失配进行了补偿,有效地修正了方向盘转角。根据车速变化不断更新侧向加速度稳态增益值实现了驾驶员模型横向位置的控制。
(3)本文中只验证了直线及曲线道路下改进驾驶员模型的有效性,后续应该分析该控制方法对不同车速以及不同道路曲率的鲁棒性。
[1] R Marino,S Scalzi,G Orlando,M Netto.A Nested PID Steering Control for Lane Keeping in Vision Based Autonomous Vehilcles [C].Proceedings of the American Control Conference,2009: 2885- 2890.
[2] Il Bae,Jin Hyo Kim,Shiho Kim. Steering Rate Controller based on Curvature of Trajectory for Autonomous Driving Vehicles[C]. Intelli -gent Vehicles Symposium (IV), IEEE, 2013: 1381-1386.
[3] 郭孔辉.驾驶员—汽车闭环系统操纵运动的预瞄最优曲率模型[J].
[4] 丁海涛,郭孔辉,李飞等.基于加速度反馈的任意道路和车速跟随控制驾驶员模型[J].机械工程学报,2010,46(10):116-120.
Lane Keeping System Based on Improved Preview Driver Model
Dong Ting
( 1.Chang'an University, Shaanxi Xi'an 710018; 2.CATARC Automotive Engineering Research Institute Co., Ltd., Tianjin 300300 )
In order to fundamentally improve the active safety of vehicle driving, based on the improved single-point preview optimal curvature driver model, the lane keeping control method is proposed, and the Simulink control model is built for simulation experiments with dSPACE ModelDesk/MotionDesk. The simulation results show that the improved model can eliminate the lateral deviation and better follow the target path, so that the vehicle can keep driving near the center of the lane.
Driver model; Lane keeping; Lateral control; Target path
U471.3
A
1671-7988(2019)24-143-03
U471.3
A
1671-7988(2019)24-143-03
10.16638/j.cnki.1671-7988.2019.24.046
董婷,女,硕士研究生,就读于长安大学汽车学院车辆工程专业,主要研究方向为智能辅助驾驶技术。
