通用雷达终端处理与显示技术研究∗
2019-12-26张兵强刘宁波
徐 涛 张兵强 刘宁波 方 伟
(海军航空大学信息融合研究所 烟台 264001)
1 引言
雷达研发的不同阶段,采用的处理与显示终端一般具有不同的技术架构。理论研究与仿真阶段主要进行算法设计、流程改进等研究,以仿真数据或者实测数据的事后处理为主,对算法实现的稳定性和实时性要求不高,常用工具为Matlab等工程仿真平台[1~2]。工程实现与试验验证阶段主要工作是筛选性能较好、有实用潜力的算法,需要考察算法的各项性能,为相关技术在实际雷达型号中的应用奠定基础。根据型号雷达研制需求,可用的开发环境有Visual C++、Qt、Visual DSP++、CCS等[3~4]。
针对单型雷达开发专用处理与显示终端系统进行工程实现与试验验证,具有针对性强、对于该型号嵌入速度快的优点,但是对于共性技术研究而言,在工程开发过程中往往受专用开发环境制约较大,雷达型号间的可移植性(兼容性)差,不利于雷达技术的普适性验证和优化完善[5]。因此,本文研究对通用雷达终端处理与显示技术进行了研究,为雷达探测技术的工程实现设计了一个通用雷达终端系统,系统可以支持算法的工程实现和性能测试,同时具有良好的可移植性和可扩展性。
2 通用雷达终端技术架构
雷达处理与显示的一般流程如图1所示。显控终端作为雷达操控的最直接人机交互设备,在实现雷达使命功能的同时,不断借鉴最新的电子设备操控理念,操作越来越灵活,界面越来越友好,功能越来越强大。现代雷达显控终端功能已经不单是进行雷达视频回波的显示,而是进行多种信息的综合显示[6~8]。由于雷达应用环境的复杂化,以及对雷达功能需求的多样化,雷达的工作模式和工作参数需要根据应用环境进行调整设置。随着硬件架构与性能的进步,这一功能也逐渐转移到终端系统[9~10]。因此,雷达终端的结构开始具有通用化和便于扩展的特点,一方面可以进行多种信息的实时综合显示,以利于雷达目标在终端的显示与判别,另一方面可以灵活设置雷达的工作模式和工作参数以适应特定的应用环境。
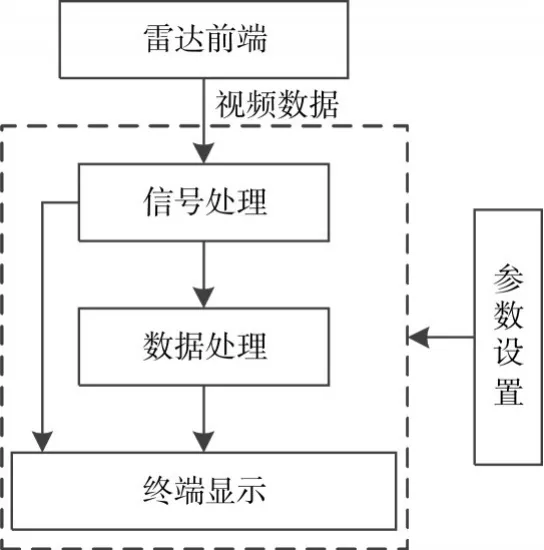
图1 雷达处理与显示流程
通用雷达终端系统所采用的技术架构如图2所示。设计思路为
1)系统工作于通用计算机平台,采用Qt进行主程序架构与子模块界面的设计[11],保证整体框架具有良好的可扩展性和可移植性。
2)子模块的算法部分采用插件式设计,以动态链接库形式进行集成,在理论研究阶段开发的Matlab算法也可封装成动态库进行集成调用[12]。这一架构使算法实现与整体框架解耦,便于算法的开发与移植。
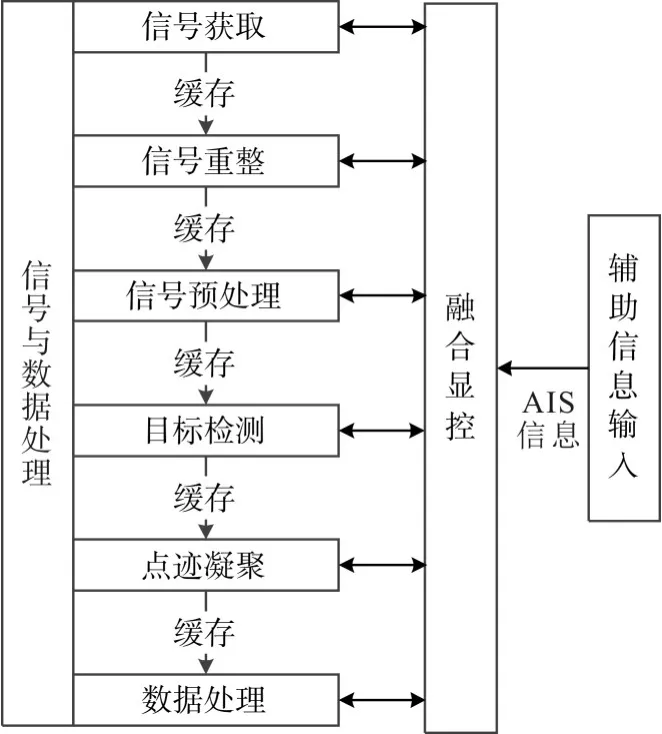
图2 通用雷达终端技术架构
3)信号与数据处理采用瀑布式处理流程,不同处理阶段之间用缓存进行数据传输与同步。由显控模块控制器工作模式与工作参数,能够接收显控模块转发的AIS等辅助信息,并输出视频信号、点迹信号、凝聚点迹信号、航迹数据等信息。
4)融合显控模块一是提供用户操作界面,控制雷达信号与数据处理的工作方式,一是获取各种信息数据并进行融合显示。
这一架构具有以下特点:
1)具有信息融合显示功能:能够支持雷达视频数据、信号处理结果、数据处理结果、AIS数据、各种标记数据等多层数据在PPI显示器上实现实时融合显示。不同类型数据的数据结构、采样率、最佳显示方式等往往各不相同,如何将其在PPI显示器上实时地综合显示,实现各种信息间的优势互补是需要解决的关键问题之一。
2)信号与数据处理可配置:具有设计合理的雷达信号处理与数据处理流程,以及能够兼容不同的信号处理和数据处理方法,支持根据需求对算法和处理流程进行调整配置,于相关算法或技术的切换、验证。
3)支持Matlab算法嵌入:雷达信号和数据处理的理论研究往往依托于Matlab数值计算软件,在向工程实现平台移植时往往需要重新编程设计,这一过程较为耗时。在算法初选阶段,一般首先验证的是算法能否实现特定技术指标,如检测概率等,在此基础上再考察算法能否满足或经过优化满足实时性需求。在验证阶段进行算法重新编程设计是不必要的,因此系统对Matlab算法嵌入的支持将大大节约算法初选的时间。
3 通用信号与数据处理技术
通用雷达信号处理与数据处理框架主要包括雷达数据获取模块、数据重整模块、信号预处理模块、目标检测模块、点迹凝聚模块、数据处理模块等部分。不同的软件模块间开辟缓冲区,便于数据获取与输出。
1)雷达数据获取模块主要完成实测数据文件的读取、雷达实时数据的获取等功能;
2)数据重整主要完成不同时期、不同采集器采集数据的格式统一、数据加密等操作;
3)信号预处理模块主要完成抗干扰、非相参/相参积累、海杂波抑制等处理;
4)目标检测模块主要完成目标CFAR处理,形成目标候选点;
5)点迹凝聚主要完成目标点迹形成的功能,可采用一维点迹凝聚、二维点迹凝聚等方法;
6)数据处理模块主要完成目标的跟踪功能,形成目标的航迹。
算法模块架构如图3所示,每个功能模块都具有算法调用接口和参数设置接口,分别负责算法插件的接入和算法参数设置GUI的调用。用户可以根据需求通过显控模块选择所需的算法并设置其参数。算法可以是C语言设计的DLL,也可以是Matlab设计的DLL。
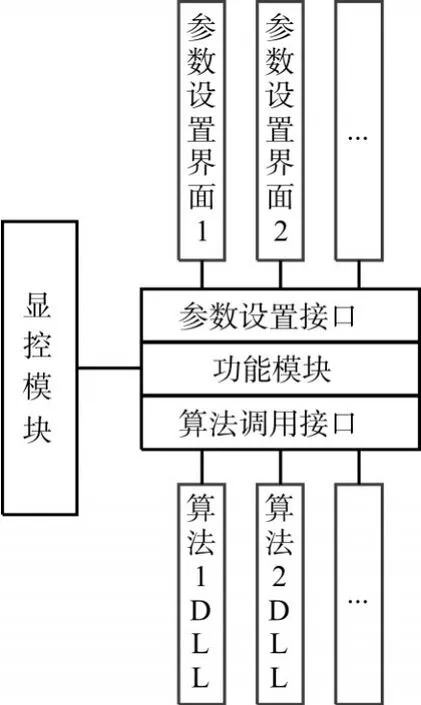
图3 算法模块架构
4 多源异构数据的多层PPI实时融合显示技术
通用雷达终端的P显要进行回波及处理结果的综合显示,以及实时显示辅助信息模块中输入的AIS信息等数据。本文采用多源异构数据的多层PPI实时融合技术解决不同格式数据的有效叠加问题。
1)显示信息的组织方式:采用分层输入、叠加显示的方式,将不通过的输入数据按照自下而上的顺序排列,最下层为雷达视频数据,然后依次是雷达目标点迹数据、航迹数据及符号标记、AIS数据及符号标记。
2)显示数据的刷新方式:由于不同数据更新率不同,系统采用插值的方法协调不同类型数据的同步显示方式。譬如P显以圆周扫描的方式更新,如导航雷达数据更新周期约为2.5s,而AIS更新周期可能为1s~6s,因此,需要对AIS数据进行线性插值,实现与导航雷达数据同步更新。
5 系统应用案例——恒虚警处理测试
采用某型导航雷达在近海海域的实测数据对恒虚警处理算法[13]进行测试。图4是雷达原始视频图像,未经过技术处理视频信号受到海杂波影响,进行目标判断难度很大。图5和图6是参考单元数R为16,保护单元数为6,虚警概率Pfa分别设置为10-3和10-6条件下的检测图。经过恒虚警处理之后,雷达接收到的信息被处理成斑点状物标,海面上一些目标能够识别出来。图7为融合视频图像、检测信息和AIS信息之后的显示图像。借助AIS信息可以进一步对检测目标进行识别。

图4 雷达视频图像
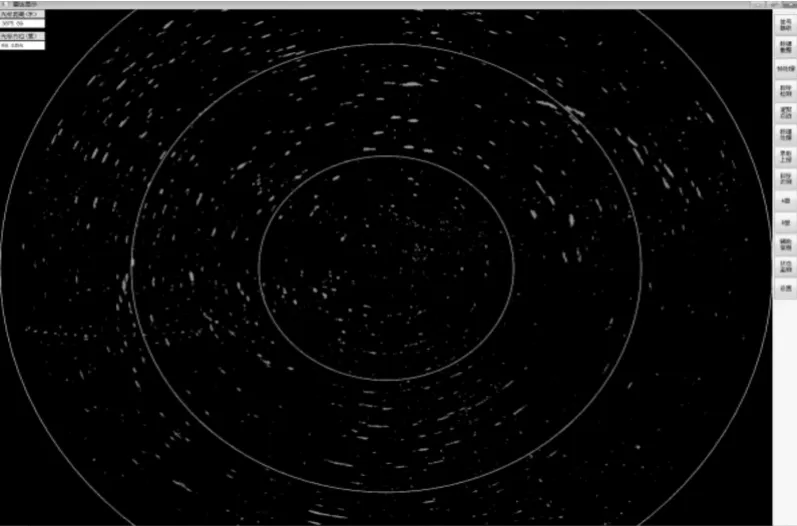
图5 检测图(R=16,Pfa=10-3,保护单元数6)
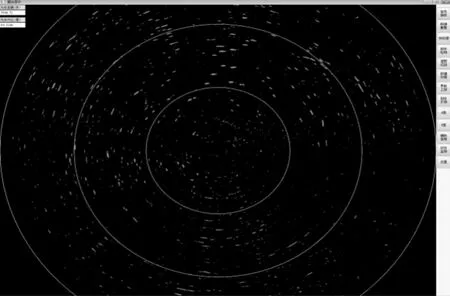
图6 检测图(R=16,Pfa=10-6,保护单元数6)

图7 融合显示图(局部放大)
6 结语
现代雷达工作环境和功能需求日益复杂,雷达技术工程实现和试验验证的难度也相应提高。本文对设计了一种兼具雷达信号、数据处理和终端显控通用雷达终端系统,具有可扩展性强的雷达信号与数据处理架构,且支持视频信号、目标点迹、航迹和AIS信息等多源信息的融合显示。应用案例表明该系统可以有效地支持雷达探测技术的工程实现和试验验证。
