激光雷达传感器功能仿真方法研究∗
2019-12-26张鸿喜赵世明
张鸿喜 赵世明
(中国人民解放军91404部队41分队 秦皇岛 066001)
1 引言
在装备试验鉴定过程中,常采用分布交互式仿真系统进行试验方案推演和装备的作战能力检验。对于光电对抗分布交互式仿真系统的构建,需要建立一个基于DIS、HLA或TENA等适用于多种光电对抗任务仿真需求的分布式仿真架构,该架构集成对抗双方兵力、武器、战术、战场环境等各类模型[1~3]。基于分布交互式仿真系统的应用需求,实现上述各类模型功能及战术、技术指标的仿真即可满足系统仿真应用需求。激光雷达传感器作为光电对抗分布交互式仿真系统的重要组成部分,其建模和仿真方法研究不可或缺。本文从一般意义上研究激光雷达传感器的功能仿真方法,主要研究分布交互式仿真系统中基于激光雷达传感器原理的激光寻的制导导引头功能级建模与仿真,首先针对典型激光雷达传感器,建立了参数描述模型,作为其仿真模型建立和仿真的基础,而后,建立了激光雷达传感器模型,重点研究了激光雷达信号门限值计算模型、目标像素计算模型,以及目标捕获计算模型,最后给出了仿真运行结果,得出了目标捕获概率计算一般性规律,表明该激光雷达传感器模型可用于激光雷达导弹制导仿真应用。
2 激光雷达传感器参数描述
激光雷达传感器模型建模时,为了逼真模拟激光雷达传感器的性能,必须对激光雷达传感器模型相关参数进行描述,包括相应目标和大气环境参数描述。
2.1 激光雷达传感器参数
典型激光雷达模型参数包括了功率、脉冲功率、脉冲宽度、脉冲能量、波长、子脉冲数量、分辨率、脉冲重复频率、波束散射以及接收机门限[4]。
典型激光雷达传感器扫描参数和导弹弹道包括了导弹飞行高度、飞行速度、俯仰角、倾斜角、倾斜频率[5]、偏航极限、偏航率,以及有效的光学系统水平和垂直视场。
2.2 目标与环境参数
目标由其物理形状、大小以及反射系数进行定义[6];目标类型和方位由激光雷达的瞄准距离、下视角以及方位角决定。该模型也用于进行目标遮蔽仿真。
对于气象条件,环境可由大气透过率参数描述,大气透射率是大气能见度的函数,该模型也描述了由于战场烟幕引起的战场不可视情况[7],包括雨、雪、雾以及敌方释放的烟幕等因素。
3 激光雷达传感器建模
3.1 激光雷达传感器目标捕获过程设计
激光雷达传感器模型的核心是捕获模型,该模型负责计算传感器的捕获概率,捕获概率是以上各参数的函数。目标捕获概率计算过程如下:
1)在气象条件、射程以及目标反射系数的基础上,计算目标信号门限值S/T。
2)如果信号门限值S/T大于1,目标反射激光信号值将由目标类型、方位、导弹射程以及激光雷达方位分辨率等参数计算。通过创建一个具有适当分辨率和方位的目标像素图,可以计算出目标的激光返回值,而目标像素由目标像素点求和计算。
3)根据捕获概率-目标像素实验曲线计算得到捕获概率。仿真过程中所产生随机数与捕获概率比较以确定目标是否捕获。
4)若目标被捕获,目标信息记入目标报告,经任务管理器处理决定导弹是否攻击以及何时攻击。目标信息包括目标惯性位置和捕获时间。
3.2 信号门限计算模型
激光返回信号门限值S/T通过以下公式计算[8]。
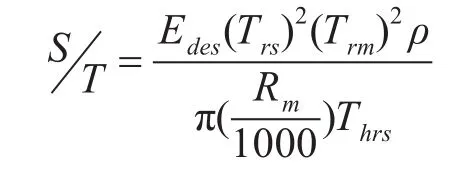
式中:Edes为激光束能量(焦耳);ρ为目标反射率(%);Thrs为传感器获取目标的圆形区能量门限值(焦耳/平方厘米);Trs为烟幕以及能见度不高情况下的激光透射率(%);Trm为纯净大气环境情况下的激光透射率(%);Rm为传感器到目标的距离(m)。
烟幕以及能见度不高情况下的激光透射率Trs是指定烟幕类型(定义了与波长相关的消光系数)和指定的浓度路径长度(concentration-pathlength)的函数。
激光透射率是特定可视范围的函数[9]:

式中:α1.06为1.06μm时的消光系数,计算公式为α1.06=0.73α1.16
v;αv为可视消光系数,计算公式为αv=3.912/vis。
其中,Vis为可视范围。
当S/T<1时,捕获概率=0.0
当S/T>1时,捕获概率=f(POT),其中POT为目标像素数量。
3.3 目标像素计算模型
捕获模型的核心是根据S/T和目标像素POT计算出目标捕获情况[10]。目标像素的计算模型可以生成在适当的距离、方位角和俯仰角观察到的目标像素图,输入数据包括像素分辨率、目标类型、目标距离以及方位角,输出数据包括在特定距离和方位由激光雷达捕获的目标像素数量。
激光雷达扫描到的任何目标都将形成一个特定的表征区域[11]。典型激光雷达的分辨率为0.4毫弧度,可在大约1km处捕获到目标。激光雷达发射出的激光经目标反射后在1km处将扩散至0.4m。因此,4m×4m的目标板的分辨率为100个像素点。在激光雷达模型中,目标像素是由垂直和水平轴上像素的数目、目标距离以及激光雷达分辨率决定。
此外,目标像素数还与目标与周围环境的空间关系有关,目标受地形及周边目标遮蔽导致激光雷达仅能观察到部分目标像素。
3.4 捕获概率计算模型
捕获概率是关于导弹自动目标捕获性能的函数。如果S/T大于1,可以假定有足够的信噪比(S/N)。因此,目标像素就成为增强系统性能的重要参数。如果目标像素低,尽管潜在目标被探测到的可能性很高,特别是相对比较平坦的地形条件,但目标图像中没有足够的距离信息,以至于不能对目标进行区分。随着目标像素的增加,将可获得更多的距离信息,以确定目标的实际大小和形状。因此,当目标像素较大时,捕获概率将接近于1。
4 激光雷达传感器仿真及分析
激光雷达传感器仿真是要模拟出激光制导导弹捕获目标的全过程,其仿真过程假定目标处于平坦的平原地形环境,导弹按照输入的特定弹道飞行,当达到适当的速度和高度并处于直线水平飞行状态时,激光雷达开始进行目标搜索[12]。当激光雷达扫描到目标时,开始计算捕获概率,确定传感器是否捕获到目标。传感器探测到的目标经过处理后形成目标航迹,输出带有探测时间标志的目标位置,送导弹制导模型处理,决定是否进行攻击以及何时进行攻击。
根据激光雷达仿真数据的分析,可以得出一条初步的规律,即当目标像素接近275时,捕获概率将接近75%。一般认为,成像系统的捕获概率是与目标关键区域内的线对(line pairs)呈正态分布。由于图像中的线由一排像素组成,所以线对与像素有着密切的关系,两排像素将在水平或垂直方向上形成一个线对。如果一个信噪比高的图像系统在一个接近正方形形状的目标上分辨出4个线对,那么它将分辨出8条线和64个像素点。根据这个逻辑,275个像素点大约相当于8.3个线对。图1描述了线对函数的概率曲线,当捕获概率为50%时大概需要6.5个线对,当捕获概率达到75%时大概需要8.3个线对。图2描述了捕获概率和目标像素的函数曲线,该捕获概率曲线现用于激光雷达模型。
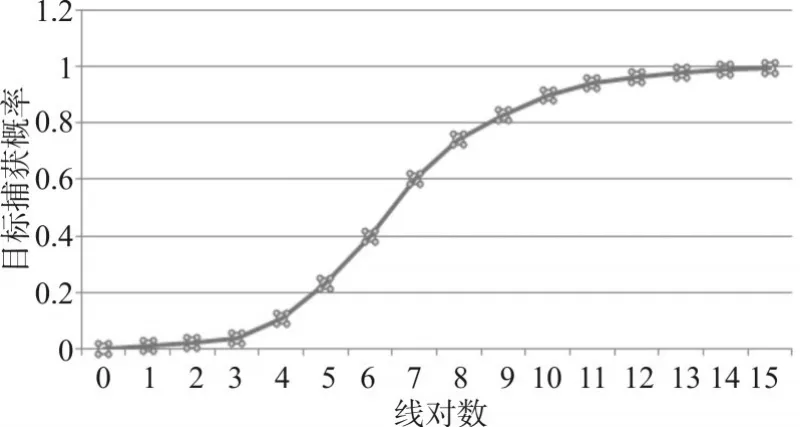
图1 目标捕获概率与线对的曲线

图2 目标捕获概率与目标像素的曲线
5 结语
针对分布交互式光电对抗仿真应用需求,本文重点研究了激光雷达传感器功能级仿真模型,核心是建立了激光雷达捕获目标概率计算模型,并相应建立了该激光雷达传感器模型参数描述,目标信号门限计算模型以及目标像素计算模型,最后根据仿真运行结果,给出了激光雷达模拟器模型应用一般规律,并应用于分布交互式光电对抗仿真系统中。本文激光雷达传感器仿真模型计算过程假定激光雷达是在在低杂波环境运行。下一步工作将建立更为逼真模型和仿真算法,进一步研究杂波信号对自动目标识别性能的影响。
