考虑临近时空序列影响的城市交通状态判别方法
2019-12-21陈泽山许梦云肖平辉刘志佳
陈泽山,方 捷,许梦云,肖平辉,刘志佳
(福州大学土木工程学院,福建 福州 350108)
0 引言
装有GPS设备的车辆作为浮动车判别交通状态已逐步走向成熟[1].邬群勇等[2]利用出租车轨迹数据计算道路拥堵指数.Nantes等[3]将线圈数据、手机GPRS数据和GPS数据作为多源异构数据,为城市主干道建立实时交通预测模型;孙超等[4]利用出租车、百度地图、公交车的GPS数据作为数据源构建融合算法进行交通状态判别.这些算法在评价道路交通状态有较好的效果,但需其他多源数据提高算法准确性.李勇[5]将城市区域划分为40×40个单元格,计算各时段各网格中车辆轨迹的平均速度确定拥堵阈值.Yang等[6]将研究区域划分为30×20个格子,基于相关交通特性判别拥堵.通过网格法判别交通状态能较好地描述城市宏观交通状态,但容易忽略区域网格内的路网密度等因素,单路段高拥堵状态平均到区域网格内,其显著性降低.
鉴于此,本研究基于车辆GPS数据特性进行车辆轨迹化处理,以离散的路段和时间段为分析单元对道路网络进行交通状态研究,由于交通流在时空上具有延续性和相关性的特点,采用考虑邻近时空序列速度可提高算法的准确性.
1 营运车辆GPS数据特性分析
研究以漳州市中心城区2017年4月11日营运车辆的GPS数据作为数据源,车辆类型分为载货和载客汽车两大类.载货车辆在道路交通网络中承担着跨区间长距离的货流输送的职能,车辆一般以较高速度行驶,能充分反映道路交通状态,缺点是由于交通管制等原因,车辆在城市中心交通网络覆盖率低;载客汽车通常分布在城市客流出行集散区,其车辆类型不包含公交车,没有固定的行驶路线,可全天候在道路上连续行驶,有利于精确地检测路段交通参数,缺点是车辆在空载时,驾驶员通常会以较低的车速行驶寻找客源,由于GPS会按照固定间隔上传数据,所以载客汽车会出现未以实际交通状况行驶的现象.研究将综合载货车辆和载客车辆的交通特性,以互相弥补两种服务型车辆在判别道路交通状态的不足.
2 算法基础定义
2.1 车辆轨迹
营运车辆GPS数据按照一定的时间频率记录其行驶状态,包括位置,时间戳等信息.将GPS数据轨迹化处理,其车辆GPS定位点和车辆轨迹定义如下
定义1定位点P定义为四元组:P={id,lon,lat,t}.其中,id表示GPS设备标识号,lon和lat表示车辆的经纬度,t表示时间戳.

2.2 路网模型
根据道路网络拓扑性建立电子地图模型,将路网离散为一系列路段边与节点,路网模型定义如下
定义3道路网络G定义为有向图G=(E,N),式中E表示路段,N表示道路节点.


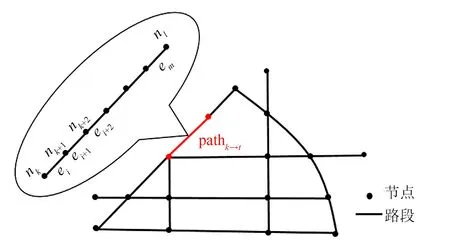
图1 路网地图模型Fig.1 Road network map model

2.3 路段交通运行状况划分
速度能直接反映交通状态,对交通状态的变化有较高的敏感性.参考《城市交通运行状况评价规范(GB/T 33171—2016)》[7],选取速度作为交通状态的判别依据,如表1所示,其中Vkj为路段速度,Vf为自由流速度,针对不同类型的道路,Vf取道路限速值.

表1 路段交通运行状况等级划分表Tab.1 Road traffic status classification table
3 交通状态判别算法设计
3.1 当前路段速度更新
将1 d离散为多个长度为Δt的时间周期,若时间周期Δt和路段长度elen足够小,则可假设在离散的时间周期和路段内交通状态保持稳定,若干个短时间跨度周期和短距离路段组合可表示连续一段时间内区域路网交通状态的变化.


(1)

3.2 考虑邻近时-空序列速度的路段速度判别
交通拥堵的产生、传播和消散都与路网结构和交通环境等时-空因素有关系[6].考虑邻近时-空序列速度进行路段交通状态判别能减小误差.根据向前的时-空衰退思想[9],在路段速度的时-空序列分析中,确定当前路段交通状态与时-空序列中相关性最强的若干序列,并且越接近当前时间周期和空间路段的序列其影响程度越大.


(2)

(3)


(4)

特别地,在空间路网之中由于存在交叉口的情况,空间序列速度中该路段上游m路段可能存在n条路径的情况,则此时空间序列速度则为:
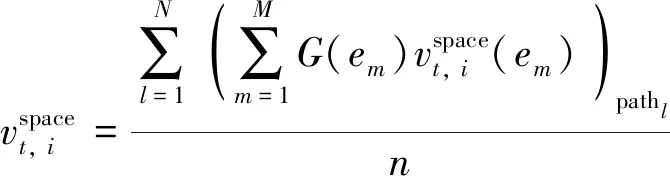
(5)
4 结果讨论与分析

4.1 基于时-空序列速度路网交通状态判别分析
对实验区域路网交通状态进行时空规律演化定性分析.以17:00—19:00作为晚高峰分析为例,交通状态变化如图2所示.在17:00—17:30期间交通拥堵已迅速形成,该时间段拥堵的主要原因是由于单位下班或放学时间较为统一,交通出行量突增,因此拥堵主要集中在核心区域;17:30—18:30时,拥堵呈现向周围扩散的趋势,拥挤程度降低但拥堵面积扩散;18:30—19:00时交通拥堵已经消退,拥堵路段数量显著减少,但在漳州市商业圈附近出现了略微拥堵,晚高峰的交通状态变化情况与实际情况基本吻合.

图2 试验区域晚高峰路网交通状态变化Fig.2 Change of traffic status at the evening park in the test area
分析主干道胜利路的时空演变规律,如图3所示.
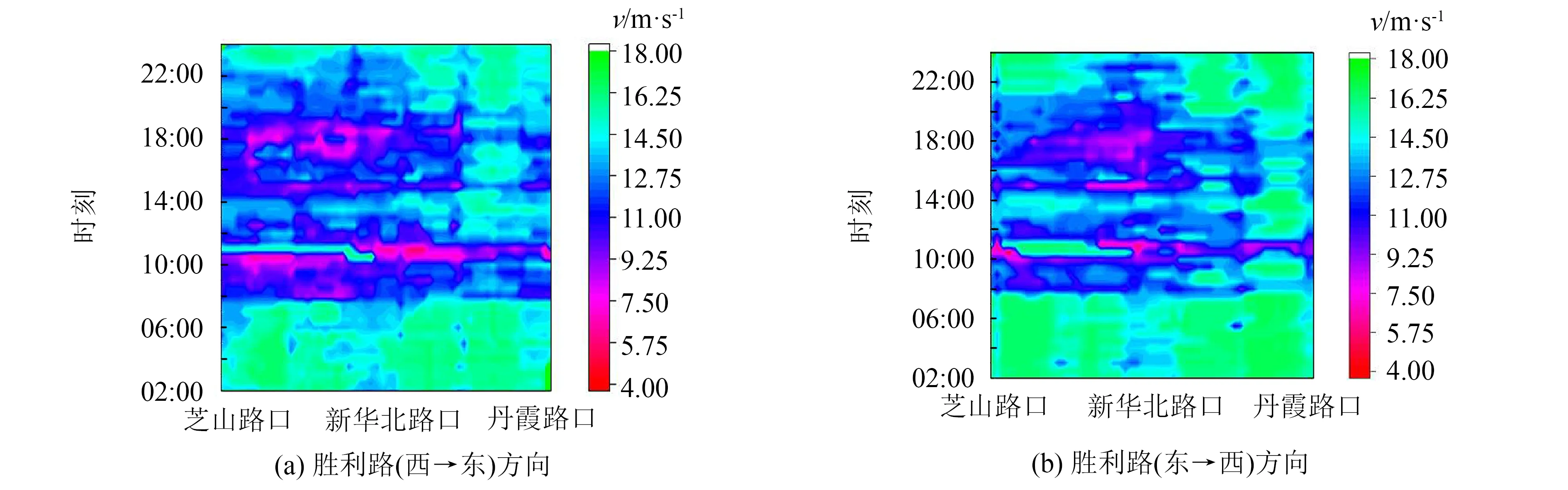
图3 胜利路交通状态变化Fig.3 Traffic state change of Shengli Road
道路交通活跃期为08:00—23:00,时间分布上,早晚高峰的运行速度显著低于其他时间段,上下午拥堵时间段分别为08:00—10:00和 17:00—19:00;交通状态在空间分布上具有制约性和传递性,当某路段出现交通拥堵,该路段的运行状态会影响下一路段;方向分布上,两方向的交通状态基本相似,但西至东的交通压力要略大于另一方向,主要因为该方向为进入市中心方向,胜利路的交通状态变化符合交通分布的时空规律.
4.2 基于时-空序列速度的有效性分析
为定量分析算法的有效性,算法计算路段速度的结果将与布设在城市路网中线圈的采集的实际结果进行对比分析.衡量误差的主要指标有平均绝对误差(MAE)、归一化平均绝对误差(NMAE)、绝对均分误差(MSE)和归一化均方误差(NMSE),具体公式如下:

(6)

(7)

(8)

(9)

算法实验结果将与线圈检测数据进行比较.选取的拥堵和畅通路段分别位于悦巷路和腾飞路,高峰时间段内该路段营运车辆平均采样量分别约为64辆·h-1和43辆·h-1,营运车辆占所有车辆的比率约为2%~3%,不同交通状态下的路段拓扑图如图4所示.
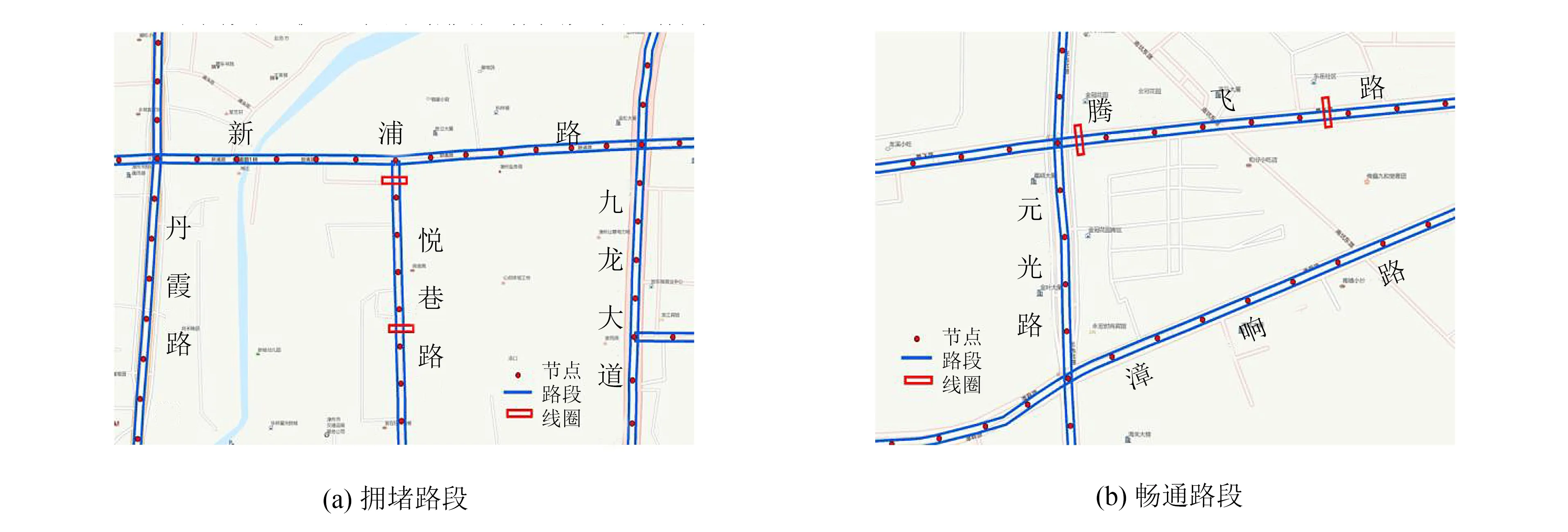
图4 不同交通状态下的路段拓扑图Fig.4 Road topology diagram under different traffic conditions
检测路段与算法结果的路段速度对比如图5所示,路段速度时变图显示上下午各出现一个交通高峰.算法的运行结果在两个路段都有一个较好的效果,如表2所示,拥堵路段和畅通路段的MAE和MSE指标相近,但由于畅通路段的平均速度要高于拥堵路段,因此畅通路段的NMAE和NMSE指标要大于拥堵路段,总体而言各项的误差指标显示出算法有一个较高的准确性.

图5 算法结果与线圈数据比较Fig.5 Comparisons between algorithm results and loop data

表2 算法结果误差分析Tab.2 Error analysis of algorithmic result
5 结语
研究构建了一种基于营运车辆GPS数据判别交通状态的算法,该算法采用邻近时-空序列速度判别路段交通状态,有效提高了算法的准确性.实验结果表明,算法在拥堵路段的准确性约为91.5%,畅通路段的准确性约为86.9%,可有效识别城市交通状态.
研究以漳州市为例定性分析路网状态,晚高峰期间主要为大量居民出行加上固有的路网瓶颈点所形成的静态堵点,晚高峰交通拥堵聚集速度快,消散速度较为缓慢.晚高峰期间车辆出行需求增大,易形成连片的拥堵,所得出的结论符合城市路网交通状态的时空分布规律.
