基于设计波法的深潜水作业支持船全船有限元强度分析
2019-12-16崔兵兵李卫华陈佳欣
崔兵兵 李卫华 陈佳欣
(上海船舶研究设计院,上海201203)
0 前言
21世纪是海洋世纪,海洋油气资源开发需要先进的海洋工程技术和装备作支撑,而随着海洋油气资源开发逐渐从浅水走向深水,水下开采技术得以快速发展,新型深潜作业支持船越来越受到关注[1-2]。
对于常规船舶,船体梁载荷可依照规范公式计算。本文研究的3 000 m深潜水作业支持船尺度超出中国船级社规范船体梁载荷计算公式的适用范围,需要采用直接计算的方法来获得。
本文以3 000 m深潜水作业支持船为例,通过对水动力载荷进行长周期分析,获得选定控制参数的长期值,并确定设计波参数。基于设计波法,在船体结构上施加水动力载荷、全船惯性力载荷和液舱货物惯性力载荷等,构成结构强度计算的设计载荷。通过对设计波载荷下目标船的全船有限元强度分析和评估,为目标船船体结构的设计提供优化方案。
1 设计波参数确定方法
本文要确定的设计波是一个波长为λ、波高为H的正弦或余弦规则波。设计波法要解决的关键问题是如何确定设计波各要素(波幅、频率、浪向等),使设计波载荷下计算出来的船体应力响应能够代表船体航行中一定超越概率水平的响应值[3]。
设计波各要素的确定流程通常为:首先建立水动力模型,选取水动力计算参数;然后分析待评估部位的受力情况,确定运动或载荷控制参数;其次基于谱分析方法计算获得选定控制参数的幅频响应;再结合具体的海浪谱和海况资料对控制参数进行长期分析,得到对应一定概率水平的长期值;最后便可以确定设计波各要素,使之产生与长期预报值对应的波浪载荷。设计波各要素的确定流程如图1所示。
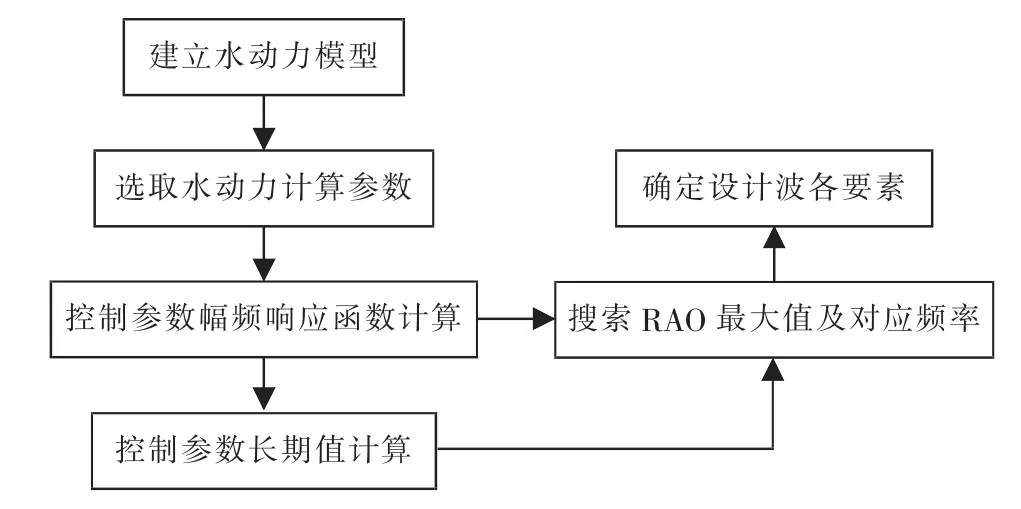
图1 设计波各要素的确定流程图
1.1 建立水动力模型,选取水动力计算参数
水动力模型采用水动力计算软件建立。设计波参数一般基于谱分析方法计算获得,在计算中,浪向角的范围一般选取0°~330°之间,以30°为步长递增,共12个浪向。波浪频率选取0.1~2.0 rad/s之间,以0.1 rad/s为间隔,共20个频率。
1.2 幅频响应函数计算
幅频响应函数H(ω)为单位规则波幅下的载荷响应幅值,可由规则波中的波浪理论计算或水池模型试验得到[4]。
1.3 控制参数长期分布的预报
基于谱分析方法,在求解获得幅频响应传递函数后,便可结合具体的波浪谱和海况散布图进行控制参数长期分布的预报。
波浪谱密度函数一般选取国际船模水池会议(ITTC)推荐使用的双参数的Pierson-Moskowitz谱(以下简称 P-M 谱)[5]。 其表达式见式(1)。

式中:Hs——有义波高,m;
Tz——平均过零周期,s;
ω——波浪圆频率,rad/s;
S(ω)——波浪谱密度函数,m2·s
由传递函数H(ω)和波浪谱密度函数,可以由式(2)计算获得响应谱密度函数。

基于短期海况下波浪运动是平稳窄带过程这一假设,对于船波构成的线性系统,控制参数的交变响应的峰值服从Rayleigh分布,概率密度函数见式(3)。

式中:R——控制参数响应峰值;
m0——功率谱密度GXX(ω)的零阶矩
进而,可得到控制参数响应峰值的分布函数见式(4)。

为得到控制参数在给定时间内的循环次数,需要给出控制参数交变响应过程的平均跨零率v,即单位时间内以正斜率跨越零均值的平均次数。其表达式见式(5)。

在计算控制参数响应平均跨零率时还要用到响应谱的2阶矩,控制参数的功率谱密度函数fR(R)的n阶矩计算通式见式(6)。
对于某一指定海浪散布图,可获得各短期海况出现的概率。实际船舶的航向角是任意,计算中可划分nH个航向角,并假定各个航向角出现的概率相等。应力范围的长期分布可表示为各短期分布的加权组合。其分布函数的计算见式(7)。
式中:nS——海况分布资料中的海况总数;
nH——划分的航向总数;
pi——第i个海况出现的概率,取为海况分布资料中各海况出现的频率;
pj——第j个航向出现的频率;
vij——海况i和航向j下,控制参数的平均过率,由式(5)计算
1.4 设计波参数的确定
在所有计算浪向和频率范围内搜索幅频响应计算结果,获得幅频响应最大值RM对应的浪向、频率及相位,即为设计波所对应的浪向β、频率ω及相位Φ。通过式(7)可计算得到对应于一定超越概率的控制参数长期值RL。这样对应的设计波的波幅可通过式(8)计算。

2 实例分析
本文以某3 000 m深潜水作业支持船为例,建立水动力模型和全船有限元模型,进行实船设计波法下的结构强度分析。目标船主尺度及船型参数如表1所示。
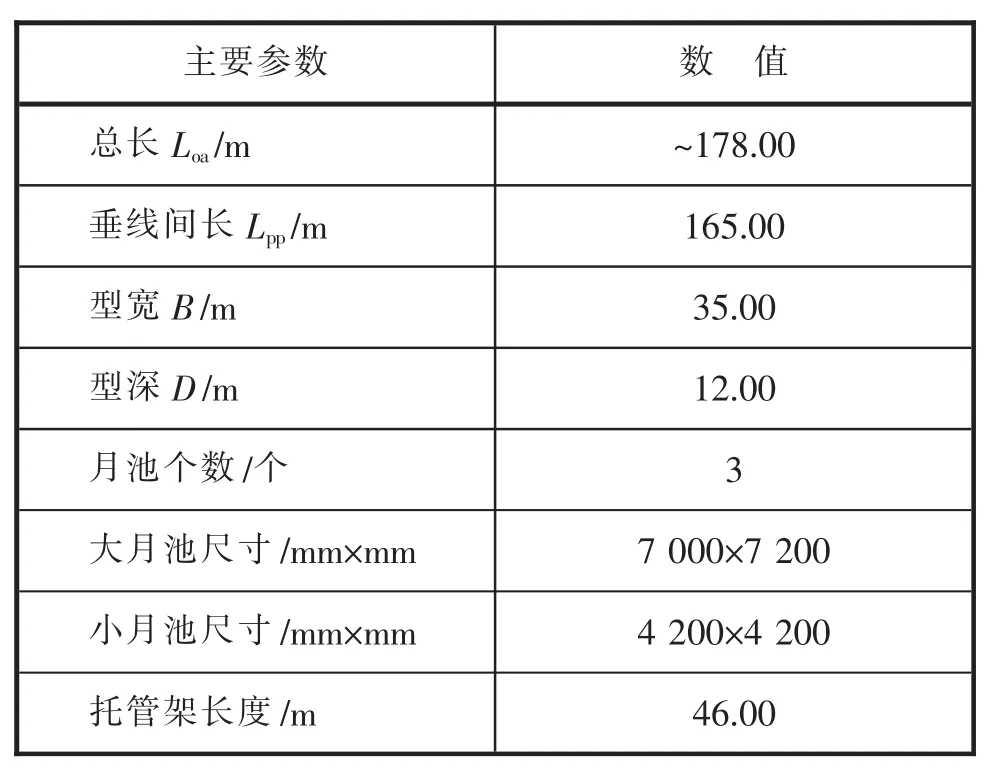
表1 目标船的主尺度及船型参数
选取如表2所示的2个典型装载工况,以船中垂向弯矩为控制参数,依照第1章的方法确定设计波参数,基于三维势流理论计算该设计波作用下船体波浪载荷和运动响应,按照船体结构强度评估流程,对目标船船体结构强度进行了评估。
表2 目标船典型装载工况
LC1工况的重量分布曲线如图2所示。LC2工况的重量分布曲线如图3所示。
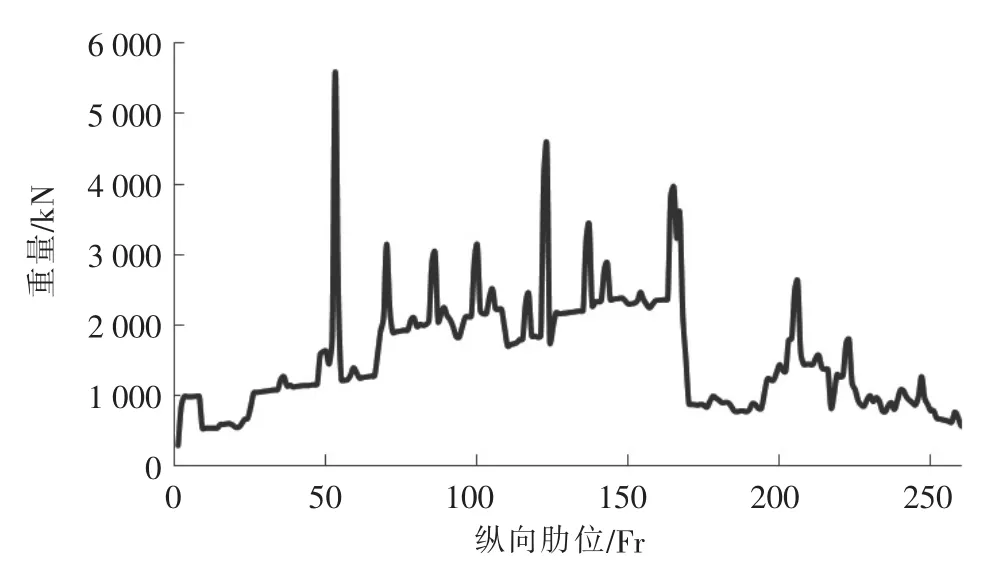
图2 LC1工况的重量分布曲线
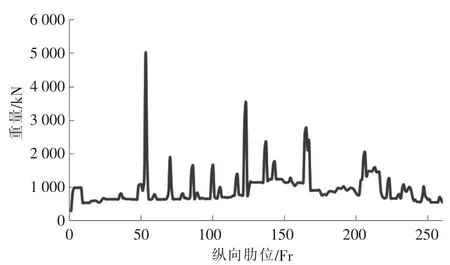
图3 LC2工况的重量分布曲线
2.1 设计波参数的确定
2.1.1 水动力模型的建立
使用DNV船级社推出的HydroD软件建立目标船全船水动力模型(含月池,托管架区域)和质量模型,目标船的水动力模型如图4所示。
2.1.2 幅频响应函数计算
选取船中剖面垂向弯矩为控制参数。波浪入射角范围取 0°~330°,间隔 30°,共 12 个;波浪频率选取0.1~2.0 rad/s之间,以 0.1 rad/s为间隔,共 20个频率。采用HydroD软件计算获得2个计算工况船中剖面垂向弯矩(My)的幅频响应函数,LC1工况船中剖面垂向弯矩(My1)的幅频响应函数结果如图5所示,LC2工况船中剖面垂向弯矩(My2)的幅频响应函数结果如图6所示。
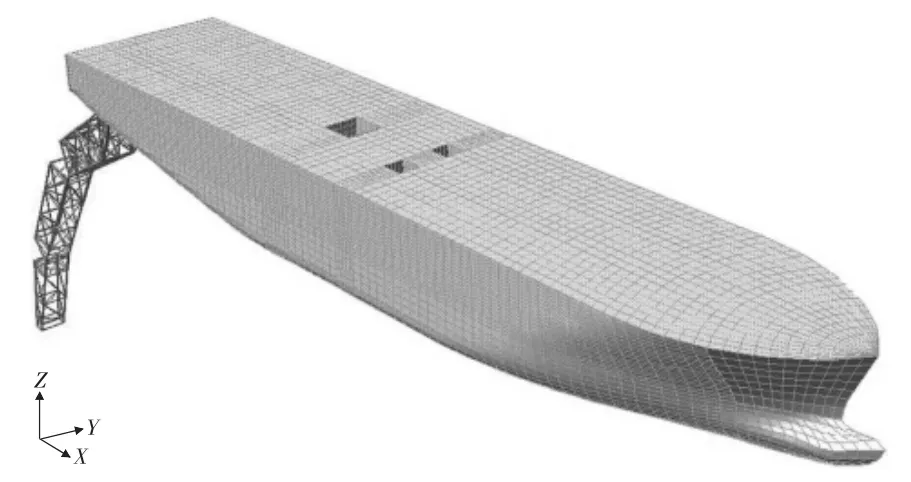
图4 目标船水动力模型
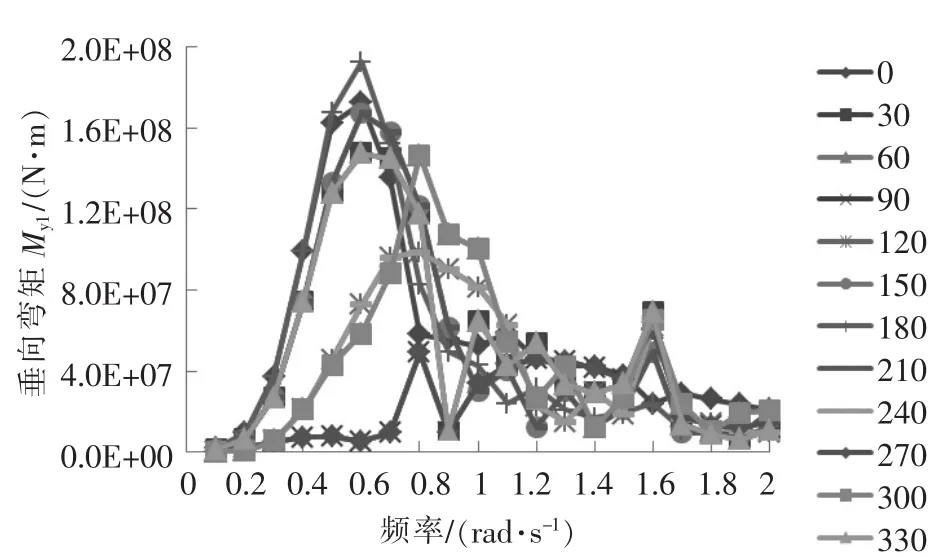
图5 LC1工况船中剖面垂向弯矩(My1)的幅频响应函数
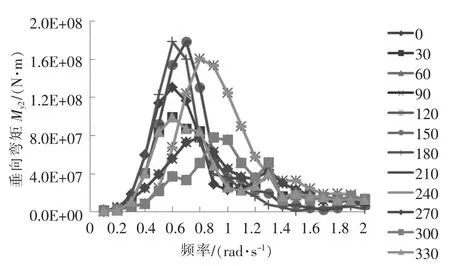
图6 LC2工况船中剖面垂向弯矩(My2)的幅频响应函数
2.1.3 控制参数长期分布的预报
采用DNV船级社推出的Postresp后处理软件(理论依据如1.2节所述),计算获得目标船垂向剪力长期值沿船长的分布如图7所示。计算获得目标船垂向弯矩长期值沿船长的分布如图8所示。软件中计算参数选取如下:
1)海浪谱采用双参数P-M谱;
2)海况选取北大西洋海况;
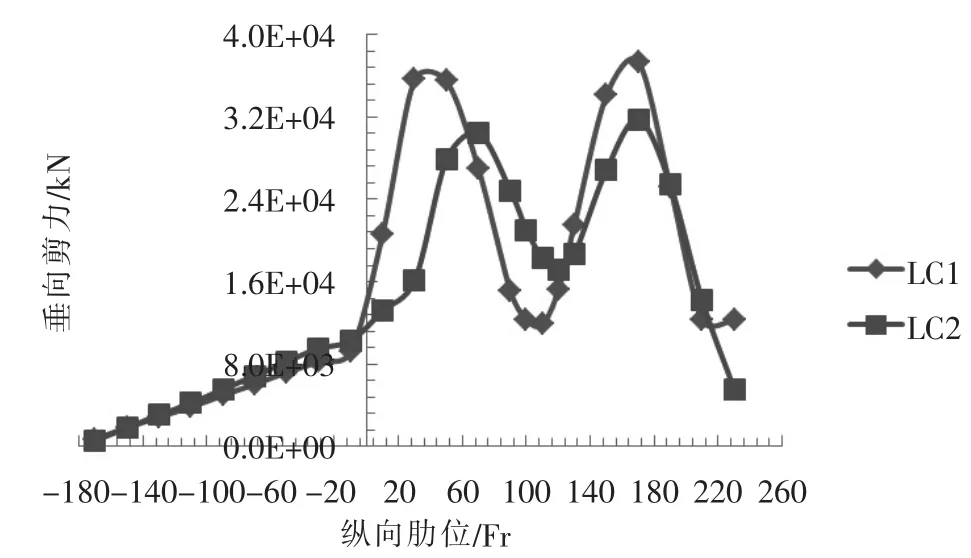
图7 沿船长各计算剖面处垂向剪力长期值分布曲线
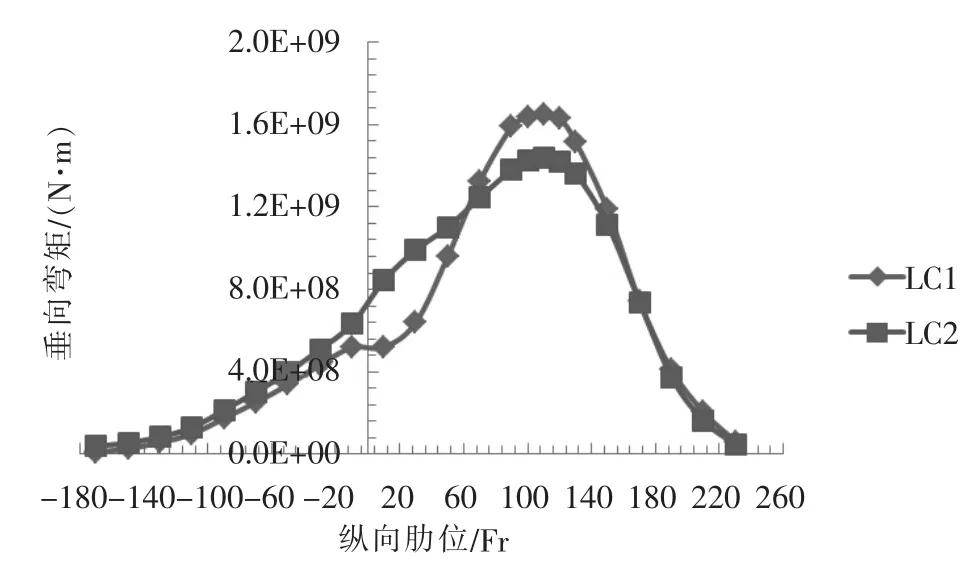
图8 沿船长各计算剖面处垂向弯矩长期值分布曲线
3)12个浪向等概率出现均为1/12;
4)选取10-8超越概率水平
从图8垂向弯矩沿船长的分布可以发现,与没有托管架的船舶相比,托管架的存在会使船尾端产生弯矩值,因而在水动力分析中考虑托管架的影响很有必要。
该船的尺度(L/B=4.7,B/D=2.92)超出船级社规范的适用范围(L/B≤5,B/D≥2.5),需通过直接计算获得船中剖面垂向弯矩的长期值,计算结果如表3所示。

表3 船舯垂向弯矩长期值计算结果
2.1.4 设计波参数的确定
依照1.4节设计波参数的计算方法,设计波参数如表4所示。根据确定的设计波参数,采用HydroD软件,基于三维势流理论方法进行波浪载荷直接计算,获得作为后续船体结构强度评估输入的船体运动和水动力载荷响应。
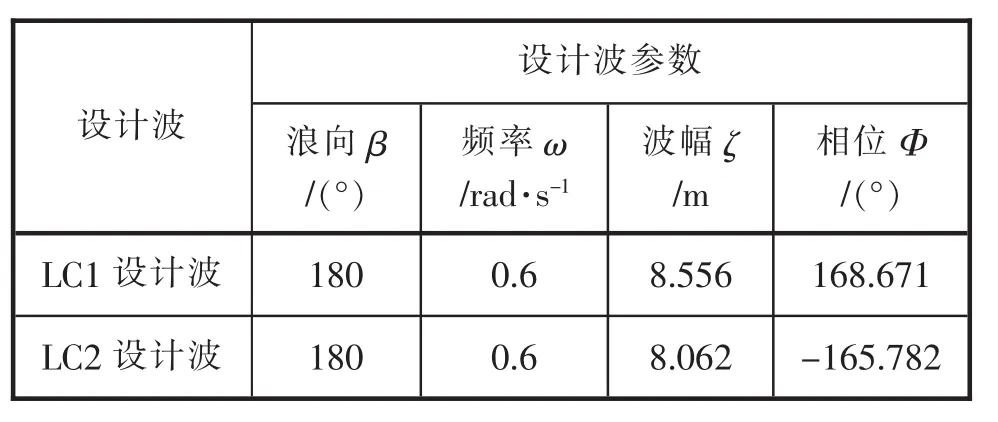
表4 设计波参数的确定
2.2 船体结构强度评估
2.2.1 有限元模型的建立
采用DNV船级社推出的Genie软件建立目标船全船有限元模型,如图9所示。模型采用右手坐标系,原点为船舶尾垂线和基线交点处,x轴为沿纵向船首方向为正;y轴沿水平方向向左为正;z轴为垂向由原点向上为正。根据相关船级社建模规范,模型主要构件采用板单元、梁单元来模拟。本文船体结构有限元分析网格尺寸最大取为700 mm×700 mm。
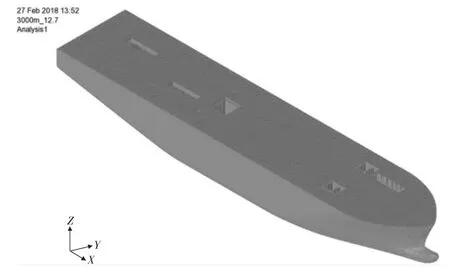
图9 全船有限元模型
2.2.2 模型静力平衡与边界条件的选取
将全船有限元模型分为13个分段,调整每段结构的密度,以模拟目标船空船重量分布。
2个计算工况舱室中货物静压力通过在HydroD中建立压力场的方式施加,目标船LC1工况的舱室模型如图10所示,目标船LC2工况的舱室模型如图11所示。
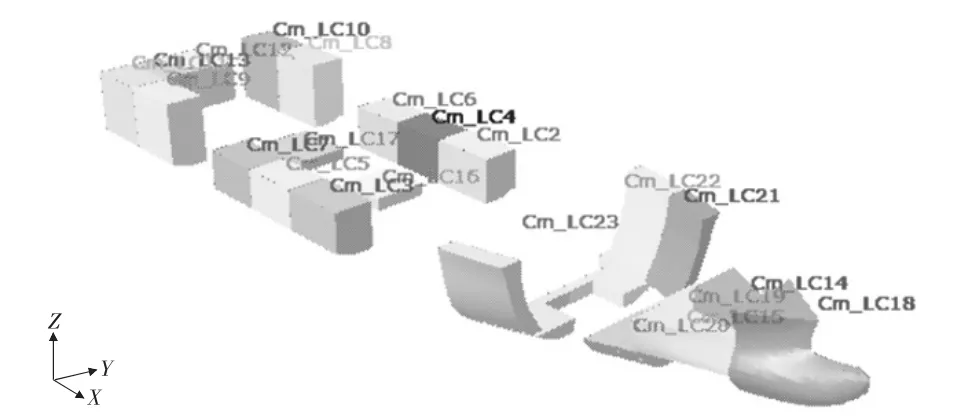
图10 目标船LC1工况舱室模型
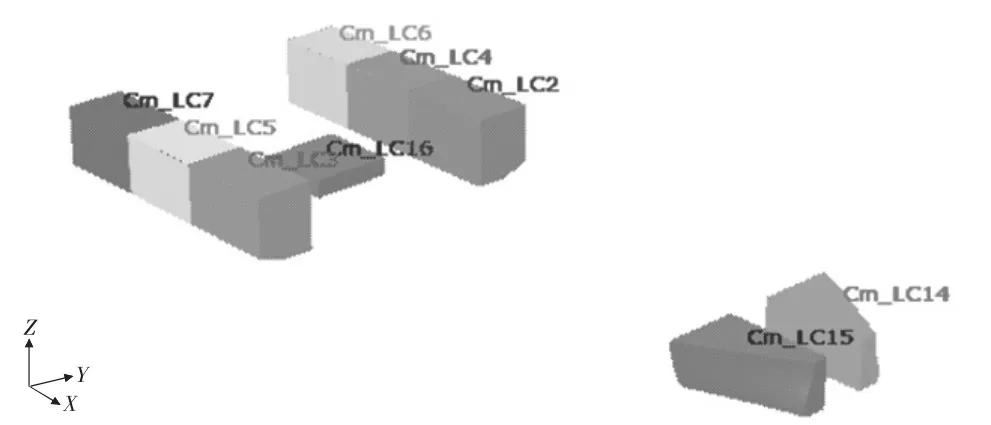
图11 目标船LC2工况舱室模型
通过在HydroD软件中调整舱室的装载,最终使船体结构有限元模型满足静水中的平衡条件:LC1工况浮心与重心的纵向坐标之差为-0.005 m,不超过船长的0.25%,排水量与装载工况的船舶重量之差为18 t,不超过工况排水量的0.1%。LC2工况浮心与重心的纵向坐标之差为-0.011 m,不超过船长的0.25%,排水量与装载工况的船舶重量之差为22 t,为不超过工况排水量的0.1%。
边界条件:尾封板底部选取横向对称2节点,首部中纵舱壁底部选取1节点,如图12所示。尾封板底部左舷限制x和z方向线位移,尾封板底部右舷限制z方向线位移,首部中纵舱壁底部限制z方向线位移,如表5所示。
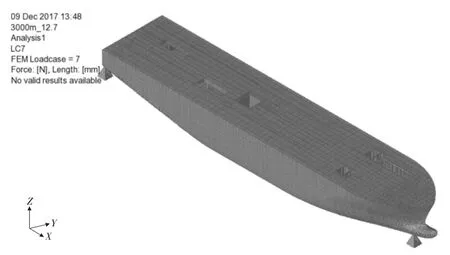
图12 全船有限元模型边界条件
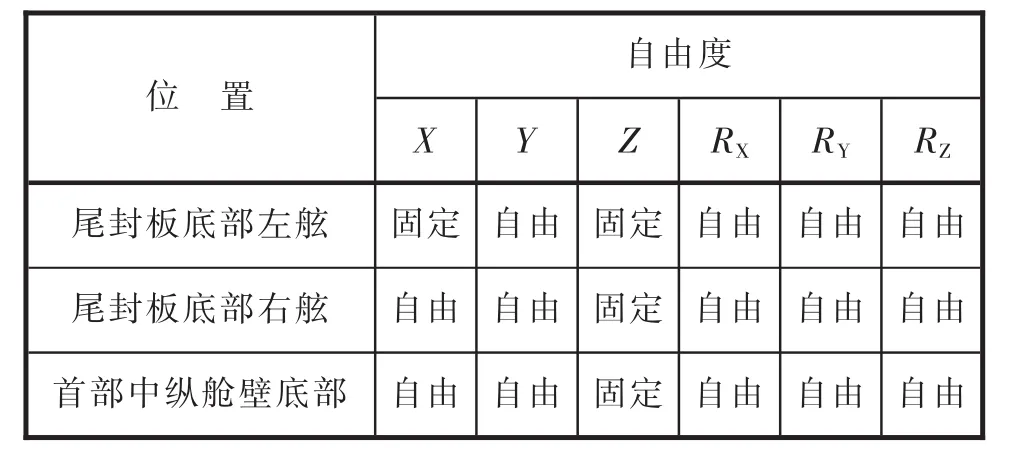
表5 有限元模型的边界条件
2.2.3 设计载荷的施加
在进行船体强度校核时要施加的设计载荷包括:
1)空船自重和全船惯性力;
2)静水压力和水动压力;
3)货物静压力和货物惯性力。
目标船全船有限元模型计算载荷的施加方式如下:
1)空船自重和全船惯性力以在重心处建立加速度场的形式施加;
2)静水压力和水动压力的计算结果由HydroD水动力网格传递至结构有限元网格,并以压力场的形式施加到船体有限元外壳上;
3)货物静压力和货物惯性力以压力场的形式施加到舱室有限元围壁上。
2.2.4 结构强度计算结果
通过分析发现静水中船体结构的变形为中拱状态,因而需叠加变形为中拱状态的设计波载荷。LC1工况:静水中全船有限元的变形如图13所示,波浪中全船有限元的变形如图14所示;LC2工况:静水中全船有限元的变形如图15所示,波浪中全船有限元的变形如图16所示。
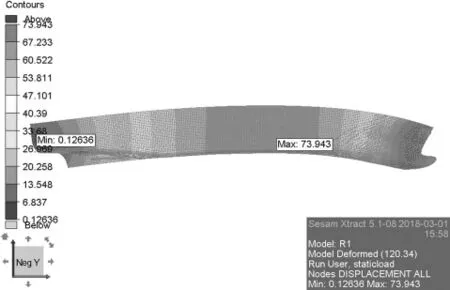
图13 LC1工况全船有限元静水变形云图
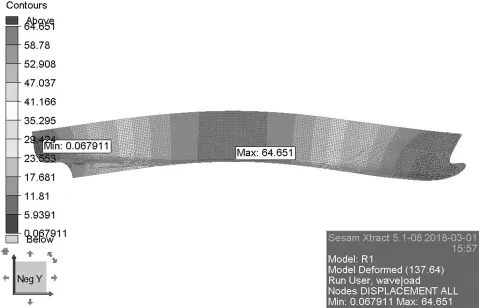
图14 LC1工况全船有限元波浪变形云图
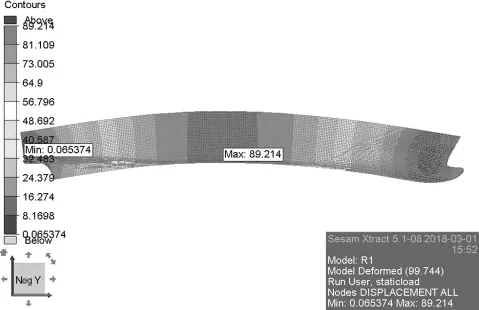
图15 LC2工况全船有限元静水变形云图
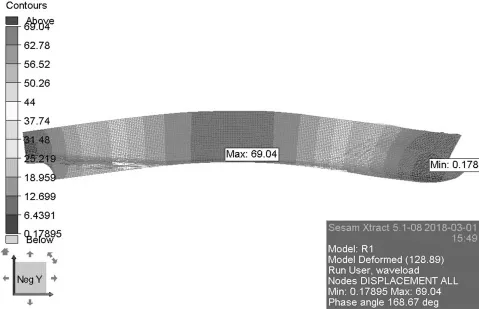
图16 LC2工况全船有限元波浪变形云图
本文的主要目的是对目标船全船结构进行设计波载荷(含静水和波浪)下的总强度分析。LC1工况:全船有限元相当应力云图如图17所示,船中月池区域有限元相当应力云图如图18所示;LC2工况:全船有限元相当应力云图如图19所示,船中月池区域有限元相当应力云图如图20所示。
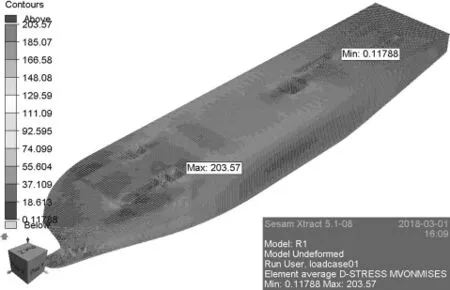
图17 LC1工况全船有限元相当应力云图
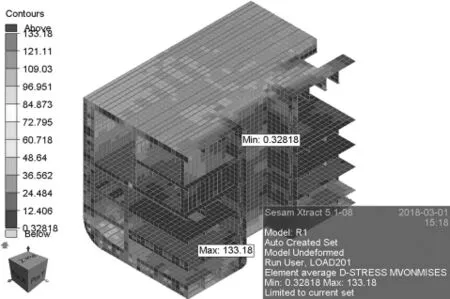
图18 LC1工况船中月池区域有限元相当应力云图
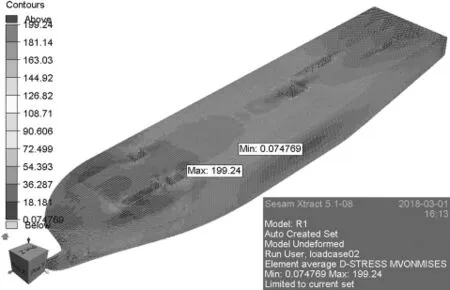
图19 LC2工况全船有限元相当应力云图
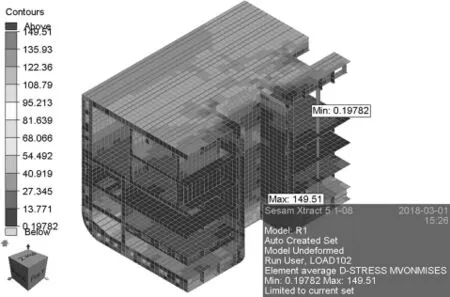
图20 LC2工况船中月池区域有限元相当应力云图
2.2.5 计算结果分析
通过设计波载荷下的全船有限元分析发现:
1)2个计算工况下,目标船船中区域都会出现较大的应力分布,高应力值均出现在首部露天甲板机舱棚开口角隅处。
2)各层甲板和船底板的月池角隅区域有明显的应力集中现象。通过增加船舯月池角隅处的板厚,应力水平明显降低。
3)LC1工况下,目标船露天甲板上有海底管道堆放,露天甲板下的与立柱连接的桁材腹板剪应力比较大。通过增加连接处桁材腹板厚度,应力水平明显降低。
3 结语
1)本文以3000m深潜水作业支持船为例,选取DNV船级社推出的HydroD软件建立了目标船全船水动力模型(含月池、托管架结构)和质量模型,并采用波浪载荷直接计算的方法,计算获得目标船2个计算工况下运动和载荷响应,为今后类似含月池、托管架结构船舶波浪载荷的计算提供了参考。
2)本文对于基于设计波法的船体结构强度分析进行了比较系统的介绍,给出了控制参数幅频响应函数及其长期值的计算方法;设计波要素的确定方法;设计载荷的施加方法等。对于以上方法的研究将为今后类似深潜水作业支持船基于设计波方法的结构强度校核打下了基础。
3)通过设计波载荷下的整船有限元分析,获得了全船的整体变形和应力状态,为目标船高应力区域结构的设计和优化提供了依据。
