基于多尺度变换的压缩感知目标跟踪算法研究
2019-12-13张雷薛大燕
张雷 薛大燕
摘要:本文根据哈尔特征维数自适应地方法来确定矩阵的稀疏性和列数来选取最终的目标跟踪矩形区域。结果表明,该算法可以不仅改变跟踪目标的矩形区域尺寸,并且改善了目标漂移的问题。
关键词:压缩感知;哈尔特征;贝叶斯分类器
中图分类号:TP391 文献标识码:A 文章编号:1007-9416(2019)09-0123-02
0 引言
目标跟踪的鲁棒性必须满足高稳定性和实时性这两个相互竞争的要求。压缩感知指出,原始的高维稀疏或可压缩信号可以由低维信号重构,低维信号的维数远远小于奈奎斯特采样数。本文提出根据哈尔特征的维数自适应地确定矩阵的稀疏性和列数的方法改变目标跟踪矩形区域尺寸。
1基本原理
1.1压缩感知和随机投影理论
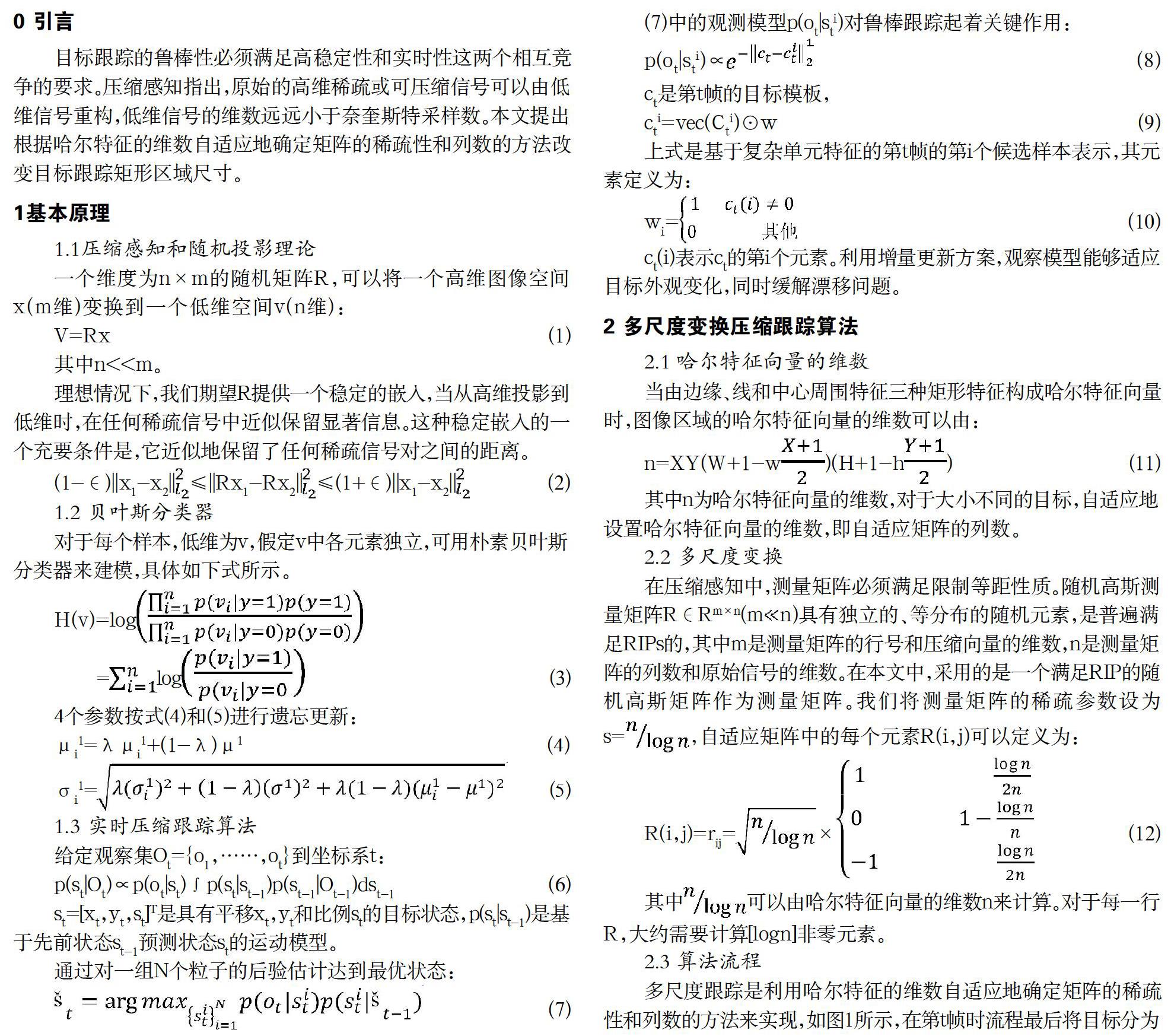
2.3 算法流程
多尺度跟踪是利用哈尔特征的维数自适应地确定矩阵的稀疏性和列数的方法来实现,如图1所示,在第t帧时流程最后将目标分为正样本和负样本;在第t+1帧时利用第t帧的正负样本将目标首先进行粗扫描并粗略的确定目标跟踪中的目标及其矩形区域尺寸,并在进一步的精扫描时根据哈尔特征的维数自适应地确定矩阵的稀疏性和列数的方法来确定跟踪目标及其矩形区域的尺寸,之后跟第t帧的操作相同,即進行多尺度滤波器、多尺度图像特征、稀疏测量矩阵等操作确定最后的跟踪目标及其矩形区域的尺寸,并利用贝叶斯分类器跟踪目标分为正样本和负样本为下一帧的目标跟踪做准备。如图1所示,红色框中便是利用哈尔特征的维度自适应的方法来实现目标跟踪矩形区域尺寸变换的主要内容,我们以此最终实现了跟踪目标图像的矩阵区域尺寸的改变,从而改善跟踪目标漂移的问题,提高了跟踪目标的精确性和鲁棒性。
3 实验结果
本算法是在Windows764位系统下MatlabR2010a环境下运行。本实验采用的是同一种视频数据库中的视频序列。
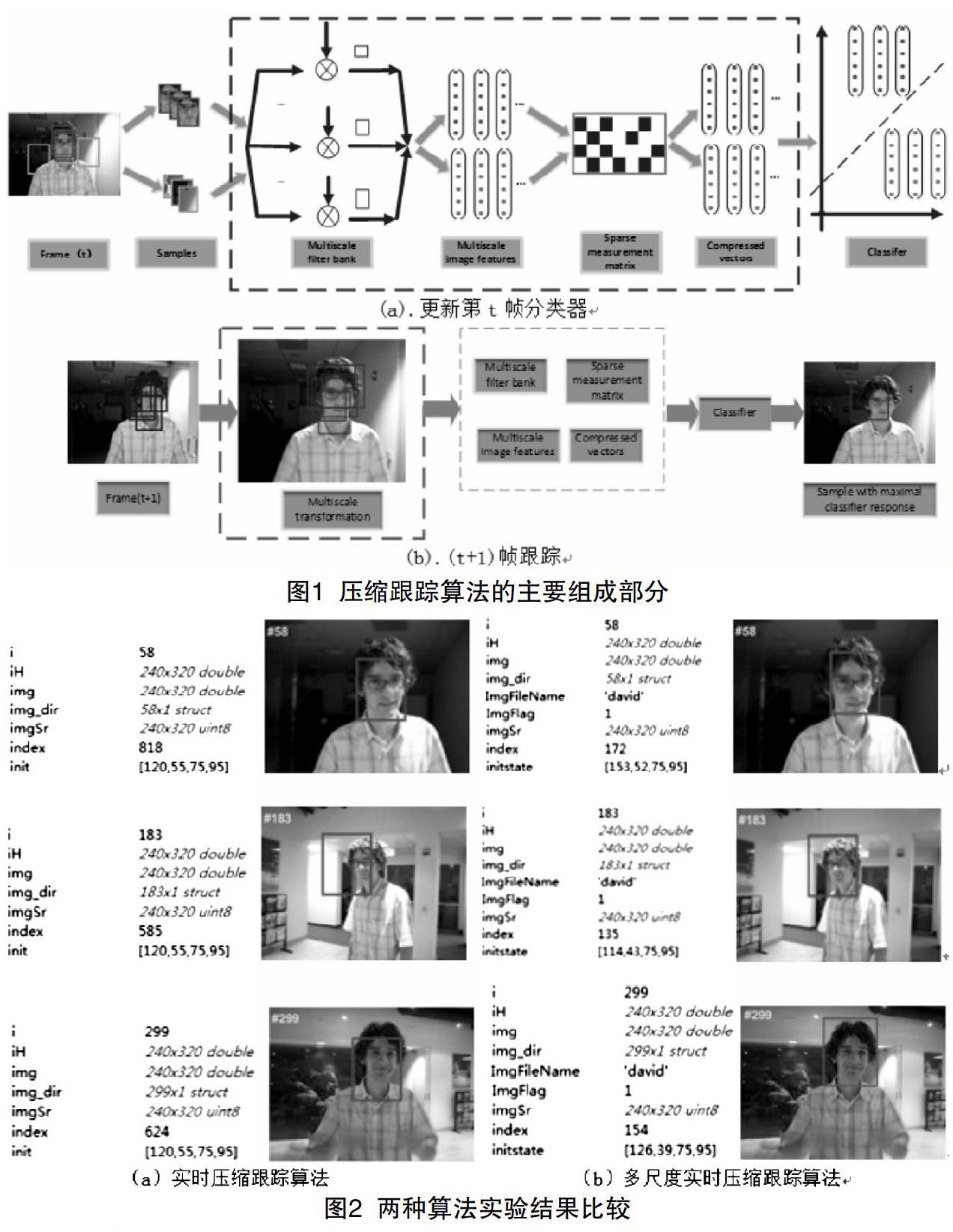
本次实验在462帧图像中抽选了3帧图像。首先由图2所示图像序列之间的对比可知,第58帧图像为光线较为昏暗的实验结果,第183帧图像和第299帧图像为光线较为光亮的实验结果,而第299帧图像中的目标较其他两帧图像相比跟踪目标特征发现了一些改变,因此,在此次实验结果验证中,也包含了一些背景因素的干扰,我们可以以此来验证改进后的算法的鲁棒性。
由此可知,实时压缩跟踪算法的跟踪目标对象的矩形区域始终为不变,而多尺度实时压缩跟踪算法的跟踪目标对象的矩形区域是不断变换的。同时,多尺度实时压缩跟踪算法并没有出现目标漂移现象。
4 结语
本文提出了一种基于压缩感知的多尺度变换的简单鲁棒跟踪算法,该算法基于压缩感知理论知识,用随机投影提取图像哈尔特征,并用贝叶斯分类器分类。大量对具有挑战性序列的最新算法的实验表明,该算法在精度、鲁棒性和速度方面都有较好的性能,改善了目标漂移的问题。
参考文献
[1] Xi Li,Weiming Hu,Chunhua Shen,et al.A survey of appearance models in visual object tracking[J].ACM Trans.intell.Syst.Technol.(ACM TIST),2013,4(58):1-48.
[2] Candès E,Tao T.Decoding by linear programming[J].IEEE Trans.Inf.Theory,2005,51(12):4203-4215.
[3] Kaihua Zhang,Lei Zhang,Ming-Hsuan Yang.Real-time compressive tracking[J].European Conf.Computer Vision (ECCV),October,2012:864-877.
Abstract:In this paper, the sparsity of the matrix and the number of columns are determined according to the adaptive method of haar feature dimension to select the final target tracking rectangular region. The results show that the algorithm can not only change the rectangular size of the tracking target, but also improve the problem of target drift.
Key words:compressive sensing;haar-like;bayesian classifier
