T型牵引架结构及其多工况加载分析
2019-12-09苗国华
苗国华
(山东临工工程机械有限公司,山东 临沂 276023)
0 引 言
平地机是一种以铲刀为主、多种附具可选,主要用于大面积平整场地、修路、刮坡、挖沟、修边渠、排水沟、除雪、松土、推土、开荒等工况的作业机械。平地机的牵引架属于箱型构件,用于安装回转架及其铲刀等。国内外对平地机工作装置的研究主要集中于平地机最大牵引力、最大下压力等工况下的静力强度校核[1]。为研究多工况下T型牵引架的受力特性,基于CATIA DMU模块建立工作装置运动仿真模型,通过仿真获得最大牵引力、最大下压力,以及铲刀带载回转、刮边沟、刮坡等工况时T型牵引架的空间位置和各球铰接的空间坐标,建立局部坐标系对T型牵引架等效约束,并将多工况下载荷等效到T型牵引架上。应用CATIA GAS模块和有限元法对T型牵引架多工况进行分析,为工作装置整体结构改进和优化提供依据和参考。
1 T型牵引架结构及其多工况空间位置
某型号平地机工作装置如图1所示,主要由左小臂、左提升油缸、右小臂、右提升油缸、摆架连杆、侧摆油缸、T型牵引架、回转架、回转驱动装置、铲刀、倾角支架以及倾角油缸等组成。
左右小臂分别通过销轴与前车架铰接连接,同时又分别与摆架连杆两端通过销轴铰接连接。左右提升油缸支架分别与左右小臂铰接连接。左右提升油缸支架、左右小臂及摆架连杆构成平地机工作装置中的摆架连杆机构。摆架连杆有若干定位孔,通过前车架的锁紧油缸锁紧摆架连杆不同位置孔,从而实现摆架连杆的调整。左、右升降油缸一端分别与左、右提升油缸支架铰接连接,另外一端分别与T型牵引架的2个球头铰接;侧摆油缸一端与摆架连杆固定球头球铰接,另外一端与T型牵引架球头球铰接。T型牵引架与前车架球面连接。回转架通过回转驱动机构驱动,可绕T型牵引架实现360°回转;铲刀与倾角支架移动副连接,并通过倾角支架与回转架铰接,倾角油缸一端与倾角支架铰接,另外一端与回转架铰接。
由上述分析可知,平地机工作装置是多自由度、多维度的复合空间机构,通过复合动作实现铲刀多维空间运动,即T型牵引架也为多维空间运动,从而满足多种工况需求。

图1 某型号平地机工作装置
根据上述平地机工作装置各部件的运动关系,抽象出各部件运动副关系,基于CATIA DMU模块实现工作装置各部件的约束到运动副关系的转变,并对球铰副按照实际状况进行等效处理,限制其绕本身轴线的自由度,建立工作装置运动仿真模型[2]。参考实际操作过程编制仿真模型,获得多种工况下T牵引架的空间位置,如图2所示。
以刮边坡工况(图3)为例,以牵引球头的球心为原点,T型牵引架方向为X轴,垂直地面为Y轴,应用右手法则建立局部坐标轴系A1;以左提升球头球心为原点,球心与左提升油缸支架铰接点连线为X轴,左提升球头轴线为Y轴,应用右手法则建立局部坐标系B1;以右提升球头球心为原点,球心与右提升油缸支架铰接点连线为X轴,右提升球头轴线为Y轴,应用右手法则建立局部坐标系C1;以侧摆球头球心为原点,球心与侧摆油缸球铰接点连线为X轴,侧摆球头轴线为Y轴,应用右手法则建立局部坐标系D1。应用上述方法分别建立均匀打滑工况、铲刀最大下压力工况、带载回转工况、刮边沟工况、刮边坡工况及刮沟工况下T型牵引架与其他部件连接处各球头的局部坐标系。
2 平地机多工况载荷分析
2.1 均匀打滑工况
平地机最大牵引力取决于2个方面:一是传动系统最大扭矩决定的最大牵引力,二是由地面附着条件决定的最大牵引力。从保护传动系统部件和整机性能等方面考虑,在整机设计过程中传动系统决定的最大牵引力要高于地面附着系数决定的牵引力,因此均匀打滑工况下的负载
式中:ψ为平地机后桥载荷分配系数,取0.7;φ为地面附着系数,取0.75;G为某型号平地机整机质量,为23 000 kg;g为重力加速度,取9.8 m·s-2。
2.2 最大下压力工况
操纵铲刀提升油缸和侧摆油缸,使铲刀支撑地面并使前轮离地,此时铲刀支撑地面力为最大下压力,此工况下前轮离地后失去转向作用,整机丧失正常工作的能力,因此此下压力为铲刀下压极限工况。左后两轮与右后两轮可分别绕后桥轴线上下摆动,将后轮等效简化为以后桥轴线为支点的两轮驱动,由力矩平衡原理可知,铲刀下切使前轮离地时有
式中:Fb为铲刀下压力(kN);L为平地机前后轴桥距(mm),某型号平地机轴距为7 080 mm;Lb为平地机铲刀距,即前桥轴线与铲刀切削刃水平方向距离(mm),某型号平地机铲刀距为2 810 mm;Gf为某型号平地机前桥分配质量,为6 900 kg。
2.3 带载回转工况
铲刀带载回转能力取决于两方面:一是双油缸摆动回转机构在油缸压力溢流情况下铲刀的回转能力[3];二是铲刀伸出到某侧铲刀单侧受力使前轮出现侧滑时铲刀的回转能力。设计时摆动回转机构所提供的回转力大于铲刀单侧受力导致前轮出现侧滑时铲刀的回转能力。当前轮出现侧滑时整机不稳定,不能有效工作[4],因此可根据前轮出现侧滑时铲刀的回转力进行校核。后轮等效简化为以后桥轴线为支点的两轮驱动,不考虑滚动阻力且假定后驱动轮没有出现打滑,如图4所示。
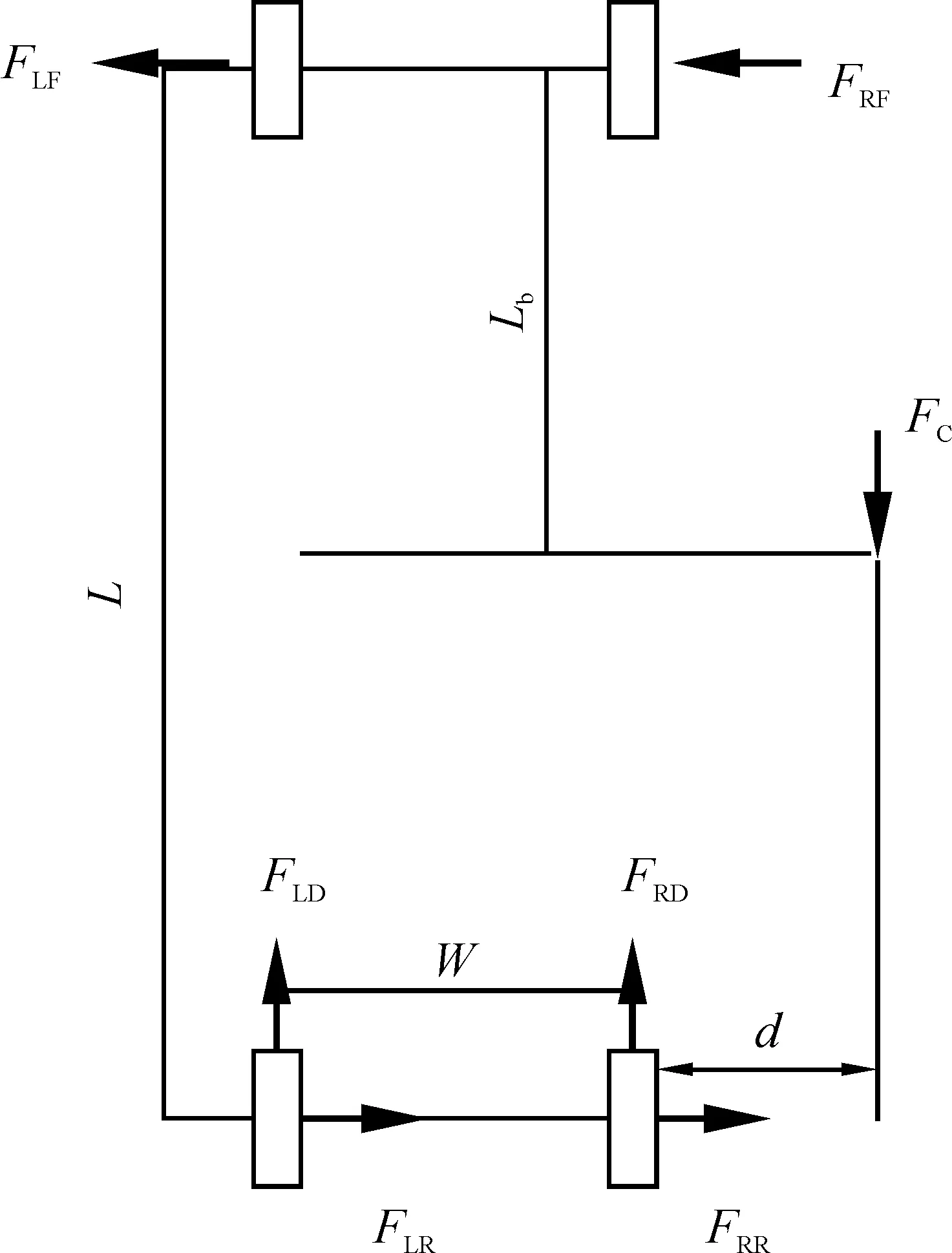
图4 带载回转简易示意
以右后轮轮胎中心为支点,由受力平衡和力矩平衡关系可知
(1)
由式(1)可知
式中:FC为前轮出现侧滑时铲刀偏载载荷(kN);FLD、FRD分别为左、右后轮胎驱动力(kN);FLF、FRF分别为左、右前轮胎侧滑力(kN);FLR、FRR分别为左、右后轮胎侧滑力(kN);W为轮距(mm),某型号轮距为2 390 mm;d为铲刀侧伸后与某侧轮胎的距离,取1 618 mm;φf为前轮侧滑系数,取0.75。
2.4 刮边沟工况
刮边沟工况负载的大小取决于整机后轮是否出现打滑,以及刮边沟产生的侧偏扭矩是否导致前轮出现侧滑,两者取小值。刮边沟工况简易示意如图5所示。

图5 刮边沟工况简易示意

式中:FE为前轮出现侧滑时铲刀刮边沟偏载载荷( kN );E为铲刀刮边沟时与某侧轮胎的距离,取835 mm。
2.5 刮边坡工况
平地机还用于道路边坡的施工,根据设计要求调整工作装置使铲刀刮边坡,此工况下刮边坡负载一方面取决于整机后轮是否出现打滑,以及刮边坡产生的侧偏扭矩是否导致前轮出现侧滑,两者取小值。刮边坡工况简易示意如图6所示。

图6 刮边坡简易示意
式中:FH为前轮出现侧滑时铲刀刮边坡偏载载荷(kN);H为铲刀刮边坡时与某侧轮胎的距离,取1 813 mm。
2.6 刮沟工况
平地机还用于刮沟或刮竖直坡的工作,此工况下刮沟负载一方面取决于整机后轮是否出现打滑,以及刮沟产生的侧偏扭矩是否导致前轮出现侧滑,两者取小值。刮沟工况简易示意如图7所示。

图7 刮沟简易示意
式中:FK为前轮出现侧滑时铲刀刮沟偏载载荷(kN);K为铲刀刮沟时与某侧轮胎的距离,取420 mm。
因FK大于地面附着系数决定的牵引力,此时整机已经出现打滑,因此取FK=118.3 kN。
3 T型牵引架载荷等效处理及有限元模型的建立
3.1 载荷等效处理及约束建立
以刮边坡工况为例,参考图8,载荷等效处理如下:边坡载荷FH等效为回转架中心面与铲刀切削刃交叉点的载荷FHeq,边坡载荷FH引起的回转载荷M等效为回转驱动齿轮载荷Fgear。
式中:M为等效回转载荷;de为边坡工况载荷点到回转架中心面的距离(mm),此工况下为1 550 mm;dc为回转架齿轮直径,为1 626 mm;n为回转驱动齿轮个数,此机构回转驱动齿轮个数为2;Fgear为驱动齿轮等效回转力(kN)。

图8 刮边坡等效载荷示意
将各工况下的铲刀载荷分别等效为柔性虚件支撑点载荷和回转力矩载荷进行简化处理。虚件支撑点处建立局部坐标系,其中X方向为铲刀载荷作用方向,虚件支撑点的载荷与铲刀载荷大小相等,方向为局部坐标系的X方向。铲刀载荷引起的回转力矩载荷通过力矩平衡关系和回转驱动齿轮与回转架的机构关系等效为回转驱动齿轮载荷。以回转驱动齿轮与回转架啮合点为原点,啮合点切线方向为X轴,驱动齿轮轴线为Y轴,应用右手法则建立局部坐标系,回转驱动齿轮载荷方向为局部坐标系的X轴方向。铲刀提升油缸和侧摆油缸简化处理,对油缸运动方向进行约束处理。根据上文分析的各工况下牵引球头的局部坐标系,在各工况分析时分别约束牵引球头局部坐标系A1的X、Y、Z三个方向的约束、左提升球头局部坐标系B1的X方向约束、右提升球头局部坐标系C1的X方向约束和侧摆球头局部坐标系D1的X方向约束。
3.2 模型简化处理
将模型从CATIA DMU模块转换到GAS模块[5],对工作装置简化等效处理,将回转架、倾角支架及铲刀简化为一个部件并进行柔性虚件处理,柔性虚件的设置支撑面为回转导向机构的安装接触面,柔性虚件支撑点为回转架中心平面与铲刀切削刃交叉点。牵引球头、T型牵引架、回转导向机构属于部装件,需要建立有限元分析模型来明确各零部件之间的联接特性,包括相互位置及力的传递关系,从而保证载荷和应力在部件之间通过联接特性进行有效传递。回转导向机构部件与T型牵引架的螺栓连接简化为柔性连接特性,回转导向机构部件与T型牵引架的面接触简化为柔性联接特性。回转驱动齿轮与T型牵引架之间的回转油缸简化为柔性联接特性,回转驱动齿轮与T型牵引架回转约束简化为滑动联接特性,回转驱动齿轮与T型牵引架的轴向约束简化为滑动联接特性。牵引球头与T型牵引架的螺栓联接简化为柔性联接特性。牵引球头、T型牵引架、回转驱动齿轮为焊接部件,因此分别通过CATIA将焊接部件转换为一个零件几何体,其中T型牵引架关键焊缝处参考国际焊接学会的焊接结构准则进行ENS(Effective Notch Stress)处理。
应用GAS模块进行网格划分,牵引球头与T型牵引架采用四面体单元,牵引球头网格大小为20 mm,T型牵引架网格大小为20 mm,局部网格大小为10 mm,其中关键焊缝处网格单元为1 mm, T型牵引架主体材料采用Q345B,各连接球铰与牵引球头材料采用42CrMo。各材料的性能参数见表1。

表1 材料的性能参数
4 分 析
应用GAS模块对各工况下的T型牵引架进行分析,得到各工况下T型牵引架等效应力云图,如图9所示。
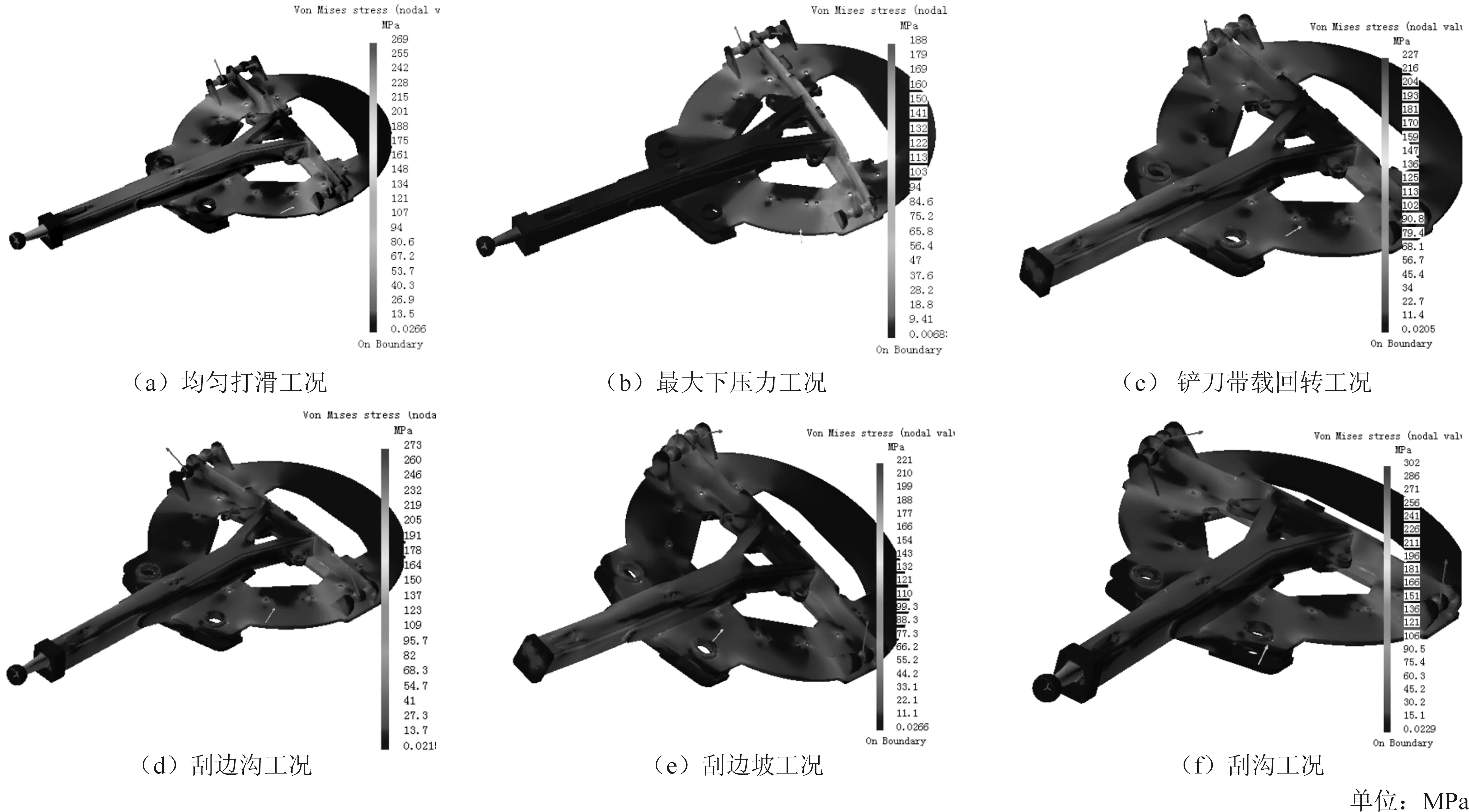
图9 T型牵引架等效应力云图
根据分析结果可知:均匀打滑工况T型牵引架最大应力位于T型牵引架导向支撑板焊接处,为269 MPa;最大下压力工况T型牵引架整体应力为188 MPa,位于加强筋板;铲刀带载回转工况下T型牵引架主体应力为227 MPa,牵引球头应力为318 MPa;刮边沟工况整体应力为273 MPa;刮边坡工况T型牵引架主体应力为221 MPa,牵引球头最大应力
325 MPa;刮沟工况下最大应力也出现在导向支撑板焊接处,为302 MPa。各工况下T型牵引架主体应力都小于345 MPa,牵引球头应力小于970 MPa,故整个T型牵引架强度满足使用要求。
5 结 语
(1)基于CATIA DMU模块建立工作装置仿真模型,获得T型牵引架各常用工况下的空间位置,并建立各工况下T型牵引架各球铰的局部坐标系。
(2)结合实际情况分析多工况下工作装置载荷特性,并对铲刀载荷等效简化为虚件支撑点载荷和回转驱动齿轮回转力矩载荷,在GAS模块中对模型简化等效处理,建立T型牵引架的有限元模型、约束及加载条件。
(3)分析获得各常用工况下T型牵引架的等效应力云图,结果表明:各工况下T型牵引架满足强度要求,也符合工程实际情况,为工作装置整体结构分析与优化提供有效依据;采用CATIA可实现复杂机构空间运动仿真、空间位置约束、结构分析,应用负载等效简化处理方法可有效分析复杂空间机构,缩短设计周期,提高设计效率。
