基于PR控制的PMSM钢模板提升平台系统的研究
2019-12-06曲衍思
摘 要:在高层建筑钢模板提升控制平台中,为了满足钢模板在提升过程中稳定性和快速性的要求,对此本文提出了一种基于比例谐振控制静态坐标下的PMSM的控制策略,在利用传统的永磁同步电动机控制的基础上对实验结果进行验证。
关键词:PMSM;PR控制;钢模板
永磁同步电动机PMSM是一种非线性的数学模型,在用于提升装置的动力源时,其调速系统需要较好的控制精度和控制效果,而传统的PI控制难以满足其钢模板提升控制的要求。因此要达到钢模板平台的提升效果,需要对传统的PI算法进行改进。传统的同步控制器都是采用同步旋转坐标下进行前馈解耦PI控制,但是在系统的运行中,系统的电阻、电感的电机参数会随着磁路温度等众多因素升高而改变,使系统的精确度下降,满足不了钢模板提升平台高精度的要求。為此,本文提出了一种基于比例谐振控制的静止坐标系下的矢量控制策略。
1 传统的PI控制策略
当前传统的矢量控制方法主要包含三个部分,转速环PI调节器、电流环PI调节器和SVPWM算法。
在转速环PI调节部分,为了便于转速环的参数整定,三相PMSM的电机运动方程为:
Jdωmdt=32pniqiqLd-Lq+ψf-TL-Bωm
若采用传统的PI调节器,则转速环控制器的表达式为:
i*q=KPω+Kiωsω*m-ωm-Baωm
在电流环调节部分,定子电流id、iq分别在q轴和d轴方向产生交叉耦合电动势,id、iq完全解耦公式为:
ud0=ud+ωeLqid=Rid+Ldddtid
uq0=uq-ωe(Ldid+φf)=Riq+Lqddtiq
对该式进行拉普拉斯变换可得:
id(s)
iq(s)=R+sLd 0
0 R+sLq-1ud0(s)
uq0(s)
2 基于比例谐振PR控制的矢量控制策略
对于系统的电阻、电感的电机参数会随着磁路温度等众多因素升高而改变,使系统的精确度下降等问题,提出了一种基于比例谐振控制的静止坐标系下的矢量控制策略。对于直流控制系统,在同步坐标系下的PR控制器的坐标函数为:
GPI(s)=12GPI(s+jω0)+GPI(s-jω0)=Kp+2Kiss20
其中若ω0为信号的角频率时,GPI(s)的幅值可以表示为:
GPI(s)s=jω0=K2p+2Kiω0-ω20+ω20
由于上述公式的幅值的大小可以随意变化,进而可以根据具有同频信号进行零稳态误差控制,但这种情况仅存在于理想状况,由于PR控制器本身存在的问题和自身的局限性,提出了一种改进的准PR控制器,其传递函数为:
GPR(s)=Kp+2Kiωcss2+2ωcs+ω20
同步坐标下PR传递函数为s函数,在对三相PMSM系统进行控制时,为了使离散化过程更为简便,控制效果更为明显,本文的离散化过程仅针对谐振控制器,利用双线性变换,公式变换为:
s=2Ts1-z-11+z-1
将其带入PR传递函数,可得:
GR(z)=b0+b1z-1+b2z-21+a1z-1+a2z-2
整理后得到差分方程:
y(k)=b0e(k)+b2e(k-2)-a1y(k-1)-a2y(k-2)
该方程实现了对误差信号的稳态控制,其控制比较简单且实现容易,对于钢模板提升过程中稳定性和精确性都有很好的控制,满足工程项目的要求。
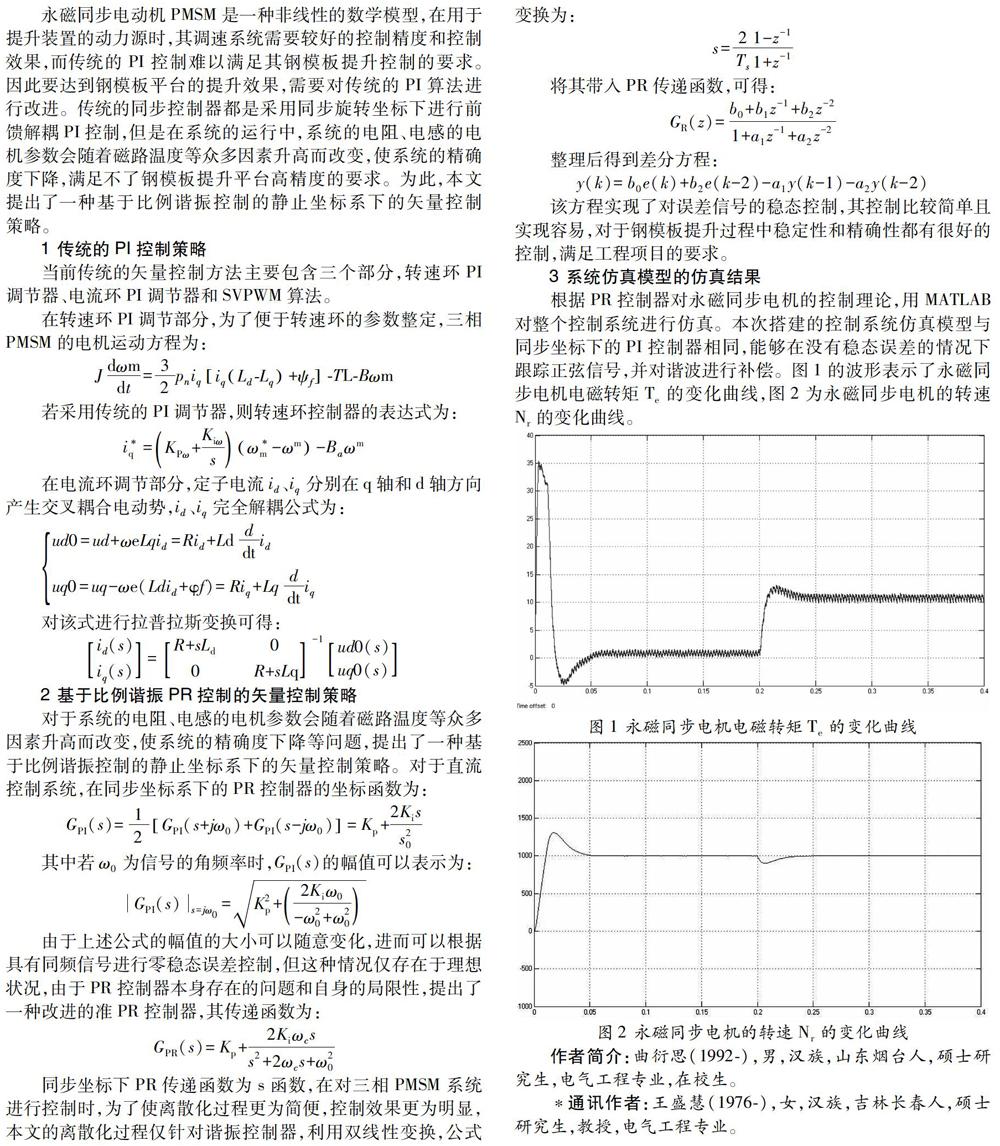
3 系统仿真模型的仿真结果
根据PR控制器对永磁同步电机的控制理论,用MATLAB对整个控制系统进行仿真。本次搭建的控制系统仿真模型与同步坐标下的PI控制器相同,能够在没有稳态误差的情况下跟踪正弦信号,并对谐波进行补偿。图1的波形表示了永磁同步电机电磁转矩Te的变化曲线,图2为永磁同步电机的转速Nr的变化曲线。
作者简介:曲衍思(1992-),男,汉族,山东烟台人,硕士研究生,电气工程专业,在校生。
通讯作者:王盛慧(1976-),女,汉族,吉林长春人,硕士研究生,教授,电气工程专业。
