基于STM32控制芯片的LED旋转显示器设计
2019-12-05邓怡辰邵亚丽佘轼
邓怡辰 邵亚丽 佘轼
摘 要:近年来,LED显示屏得到飞速发展,虽然LED显示屏的显示原理简单、直观,但缺点也是显而易见的。文章以改进传统LED显示屏的缺点为出发点,设计出一款以步进电机作为显示载体,以余晖效应作为理论基础的旋转LED显示屏,可以实现LED数量的减少,从而在不影响显示面积和效果的基础上降低功耗和成本。该旋转显示系统研究的内容主要包括3个部分:LED旋转显示屏的整体设计、硬件系统设计和软件系统设计。
关键词:发光二极管;STM32;旋转显示屏
随着媒体广告形式日益丰富,人们对显示媒介的探索也具有多元化。早期的发光二极管(Light Emitting Diode,LED)都是作为发光元件在使用,LED显示屏这些年的飞速发展,已经广泛应用于显示器。相比于传统的显示设备,LED显示屏具有寿命长、光效高、无辐射和低功耗的优点,其运用规模逐步从野外广告媒体扩展到舞台租赁,再到会议室、体育场馆等。
传统的LED显示屏都是由很多LED组成的图案矩阵,随着图片的放大,需要消耗大量的存储空间。在习惯了方方正正的LED显示设备之后,人们开始思考,如何能在原有的LED显示设备的基础上减少占用的空间和体积、降低成本与功耗。因此,本文以余晖效应为基础,运用相应的算法、STM32F103VET6芯片以及步进电机设计了一款LED旋转显示屏,它具有空间小、成本低、安装便捷等优点,可以在不影响成像效果的基础上最大限度地减少显示屏的体积和重量。
1 LED旋转显示屏的整体设计
1.1 显示屏的设计原理
LED旋转显示屏设计的核心原理为视觉暂留现象。人眼在观察四周景物时,光信号传入大脑神经,需经过一段短暂的时间,光的作用结束后,相应景物所映射的视觉形象并不会立即消失,这种残留的景象称为“后像”,视觉的这一现象就是“视觉暂留现象”[1],又称余晖效应。在此基础上,LED旋转显示屏除了要考虑上述因素之外,还需要精确的时间控制,否则画面会出现显示不完全或者轴向滚动的情况。
综上所述,影响LED旋转显示屏成像效果的因素可以概括为3个:旋转显示扇片的数量;每块显示扇片上LED的数量;扫描分辨率,即每圈分割的度数。
1.2 显示扇片的设计
LED旋转显示屏的显示扇片是以步进电机作为载体,步进电机的旋转速度是通过脉冲来控制的,通过设置脉冲控制电机旋转的速度,单显示扇片完全可以实现在视觉暂留的时间内完成一周的旋转,以各个位置图像的叠加在人脑中生成一幅完整的图像。
根据前期实验论证单显示扇片存在的弊端,产生的画面容易发生撕裂现象。设旋转扇片旋转360°后显示一幅完整的图片,生成图片所需要用到的时间为t,显示扇片的角弧度为α,res代表分辨率,每列数据扫描显示的时间间隔为ΔT,每列数据间隔的角度为Δδ,N表示显示壁的个数,则有:
由式(1)和式(2)可知,如果只有一条显示扇片,ΔT为最小值,从而每一帧所对应的数据量也越小,容易产生画面显示的不连续现象,影响显示效果。结合实际需要考虑以下两点:第一,考虑到程序开发和对主控芯片的利用程度,每条显示臂上的LED数量应为8的倍数。第二,虽然采用多显示扇片可以在低转速下实现高分辨率图片的显示,但多显示扇片相比于单显示扇片存在重量、功耗增加的缺点。所以在权衡了显示效果和功耗后,本文采用3条显示扇片、每条显示臂上24个LED来进行旋转显示屏的设计。
2 硬件系统设计
整个系统主要包括主控芯片、全彩LED驱动芯片、供电模块、电机驱动模块、霍尔元件。其中,霍尔元件的作用是为了实现精确定位,有了基准点之后,就可以使得图像显示的方向永远固定,从而防止图像发生滚动[2]。
2.1 主控芯片
主控芯片采用STM32F103VET6,使用集成电路总线(Inter-Integrated Circuit,IIC)接口与LED的DM164驱动进行通信,主控芯片上的通用输入/输出口(General Purpose Input/Output,GPI/O)引脚和驱动芯片上的DIN,DCKI引脚连接通过程序实现通信。采用双线串行接口,数据按顺序以一定的格式串行进入驱动芯片,驱动并点亮LED。
2.2 全彩LED驱动芯片
本文中单片显示扇片所使用的LED数量为24个,但单个的DM164只能支持8个全彩LED的驱动,所以每一个显示壁都需要使用3个DM164来进行级联,数据会在依次通过每一个DM164之后同步进行显示。
2.3 供电模块
供电模块电池选取锂电池,电池额定电压3.8 V,工作电压范围为3.5~4.2 V,容量6 000~8 000 mAh,放电额定电流为5 A,峰值电流达到8 A。充电管理芯片采用TI的BQ24193,集成开关模式电池充电管理和系统电源路径管理,支持宽范围输入源,当充电电流低于预设定值(10 mA)时充电器自动终止。电量检测芯片采用TI的BQ27410,使用Impedance Track技术的对电池电量进行监测,可提供剩余电池容量、充电状态(进度)、电池电压等信息。
2.4 电机驱动电路
人眼有0.05~0.2 s的视觉延时,所以将电机的轉速设置在5 r/s左右,可以保证图像不会被局部压缩或者拉升,得到清晰的显示效果。本文采用L298N作为直流电机驱动芯片,其内部有两个H桥驱动电路,并利用脉冲宽度调制(Pulse Width Modulation,PWM)波来实现对输出电压的有效值大小和极性进行控制,这种调速方式可以实现频繁的无级快速启动和反转[3]。为了防止电机驱动电路对控制模块的影响,采用光电耦合进行隔离。
3 软件系统设计
3.1 图像取模算法的设计
3.1.1 坐标轴之间的转换
图像在矩形的LED显示屏中是以直角坐标系为坐标原点进行像素点的显示控制的。但是在LED旋转显示屏中,是以步进电机为圆心,以旋转扇片半径为长度画实心圆,因此,在对图像取模之前,要先将直角坐标系转换成极坐标系。通过平移变换把两个坐标系的原点重合,并且保证两种坐标系所采用的长度单位相同。设A(x, y)是平面上的任意一点,点A在直角坐标系与其极坐标系之间的转换公式如式(3—4)所示:
3.1.2 RGB模式
不同成像原理的显示屏之间都是基于RGB三原色颜色模式来实现彩色图片的显示,将红(Red)绿(Green)蓝(Blue)三原色以不同的比例进行调和,从而产生多种多样的颜色。在计算机中,把这种模式转化为二进制来对三原色的比例进行控制。以24 bit颜色模式为例,此时每个像素值都分成R,G,B 3个基色分量,每个基色分量直接决定其基色的强度。基色的强度采用一个字节来表示,即每个像素使用24 bit,这种模式也被称为24位真彩色模式,它可以达到人眼分辨的极限,发色数是1 677万多色,也就是2的24次方。
3.1.3 图像取模
在坐标轴转换和RGB模式的理论基础上进行图像取模,确定显示旋转扇片上的LED的数量以及旋转摆扇片旋转一周所需的时间。然后在极坐标下设定分辨率(α, θ),再将坐标轴转换成直角坐标,建立该图像的极坐标点阵色彩数据,数据的值由图像上对应坐标下的24 bit RGB值确定。
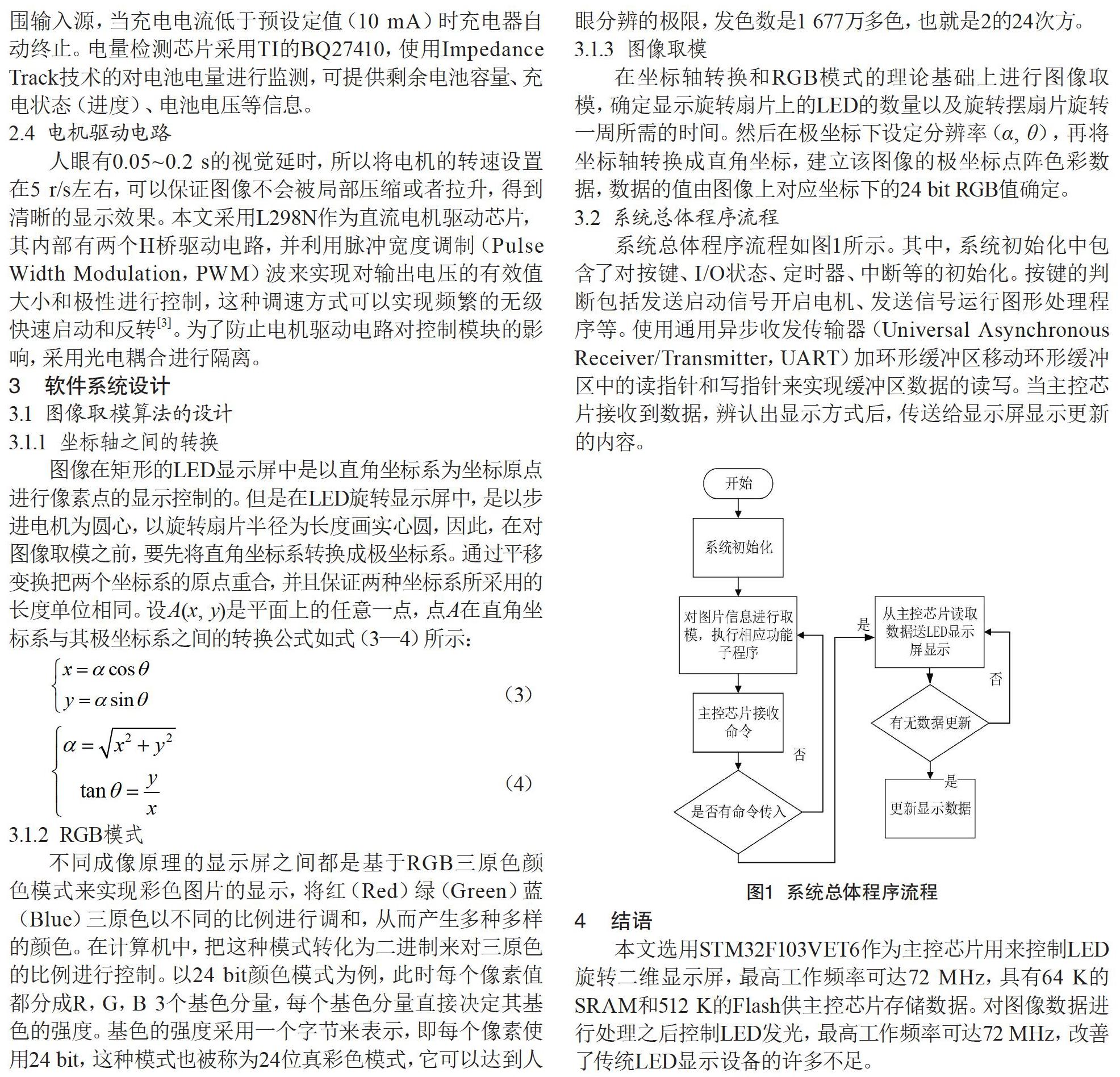
3.2 系统总体程序流程
系统总体程序流程如图1所示。其中,系统初始化中包含了对按键、I/O状态、定时器、中断等的初始化。按键的判断包括发送启动信号开启电机、发送信号运行图形处理程序等。使用通用异步收发传输器(Universal Asynchronous Receiver/Transmitter,UART)加环形缓冲区移动环形缓冲区中的读指针和写指针来实现缓冲区数据的读写。当主控芯片接收到数据,辨认出显示方式后,传送给显示屏显示更新的内容。
4 结语
本文选用STM32F103VET6作為主控芯片用来控制LED旋转二维显示屏,最高工作频率可达72 MHz,具有64 K的SRAM和512 K的Flash供主控芯片存储数据。对图像数据进行处理之后控制LED发光,最高工作频率可达72 MHz,改善了传统LED显示设备的许多不足。
[参考文献]
[1]张亚.旋转LED显示屏设计[J].科技视界,2012(30):105-107.
[2]李思霖.霍尔效应原理及应用研究[J].电子世界,2018(2):80-81.
[3]殷留留,韩森,王芳,等.基于L298N的直流电机调速系统的设计与应用[J].信息技术,2017(6):104-107.
