无刷直流电机转矩磁链强耦合特性分析
2019-12-03杨建飞张亚飞曹伟胡敏强邱鑫
杨建飞 张亚飞 曹伟 胡敏强 邱鑫

摘要:两相导通无刷直流电机(BLDC)由于存在关断相、非正弦以及转子位置与驱动信号有严格对应关系等特点使得其直接转矩控制(DTC)的实现方法有其特殊性。研究并分析了两相导通条件下无刷直流电机定子磁链和电机转矩的变化规律以及二者之间的相互影响关系,指出由于定子磁链与电机转矩之间存在一一对应的强耦合关系,磁链闭环的存在会严重影响转矩控制效果,对于两相导通的BLDC DTC系统,在其实现时应当省去磁链环而采用纯转矩环控制方法。在一套无刷直流电机实验平台上对不同条件下的定子磁链和转矩变化情况进行了对比实验分析,实验结果验证了理论分析的正确性和实现方法的可行性。
关键词:无刷直流电机;直接转矩控制;电磁转矩;定子磁链幅值;电压矢量
DOI:10.15938/j.emc.2019.10.011
中图分类号:TM 315文献标志码:A 文章编号:1007-449X(2019)10-0095-07
0引言
电机控制的本质是控制电机转矩,而直接转矩控制方法(direct torque control,DTC)将电机转矩作为直接控制对象以实现电机的高性能运行。不同的电机由于结构和转矩产生机理的不同,导致其DTC的实现方法也存在显著区别。目前常见的几类电机,包括异步电机、正弦波永磁同步电机和方波永磁同步电机,即无刷直流电机(brushless DC motor,BLDC),DTC的具体实现方法也多种多样,但从转矩控制结构来看可以分为两大类:一类采用定子磁链和转矩双闭环结构来实现转矩直接控制,另一类采用转矩单闭环结构来实现转矩的直接控制。其中,异步电机和正弦波永磁同步电机DTC理论体系已经相对成熟,而无刷直流电机DTC理论还在进一步发展完善中,特别是由于存在关断相和相关量非正弦等原因,导致其在采用DTC控制方法时与其他两类电机存在诸多不同,因此,确立一个适用于BLDC DTC系统的实现方法成为亟待解决的关键问题。
在Zhu Z Q首次提出的BLDC DTC实现方法中,采用的是磁链和转矩双闭环结构,得到的定子磁链轨迹为圆锯齿形,文献在此基础上的进一步研究发现双环控制方法下对磁链幅值的控制效果不明显,但没有对转矩的控制效果作进一步分析。为了避开关断相的影响,文献提出了六边形磁链轨迹的双环控制方法,而为了解决关断相对转矩和磁链控制的影响,文献提出了超空间矢量条件下的双环控制方法。文献在分析了转子位置信号与电压矢量对应关系的基础上直接引入了纯转矩环的控制方法。文献为了避开双环中磁链给定和计算的问题也直接采用了纯转矩环的实现方法。文献从永磁同步电机的共性出发提出了纯转矩环的控制方案。文献则重点对纯转矩环方法下的转矩脉动抑制方法展开研究。尽管两种方案均能够实现BLDC DTC,但是否应该采用磁链闭环还没有定论,BLDC DTC中定子磁链与转矩之间的内在联系还没有明确,两种实现方法之间的联系以及哪种方法更适用于两相导通BLDC DTC系统依然没有结论,而这些问题的解决与否将直接关系到两相导通BLDC DTC系统理论的发展与完善。
本文将从两相导通BLDC电机基本数学模型出发,分析电机非弱磁运行条件下定子磁链、电流矢量、电压矢量、转子位置以及电机转矩之间的内在关系,重點分析定子磁链幅值随电机转矩的变化规律,进而得到在两相导通BLDC电机系统中二者之间的约束关系以及对DTC实现方法的影响,并通过实验进行验证分析,以厘清两相导通BLDC DTC系统中的基础理论问题。
1两相导通BLDC DTC转矩磁链强耦合特性分析
1.1两相导通方式下BLDC转矩与定子磁链之间的关系
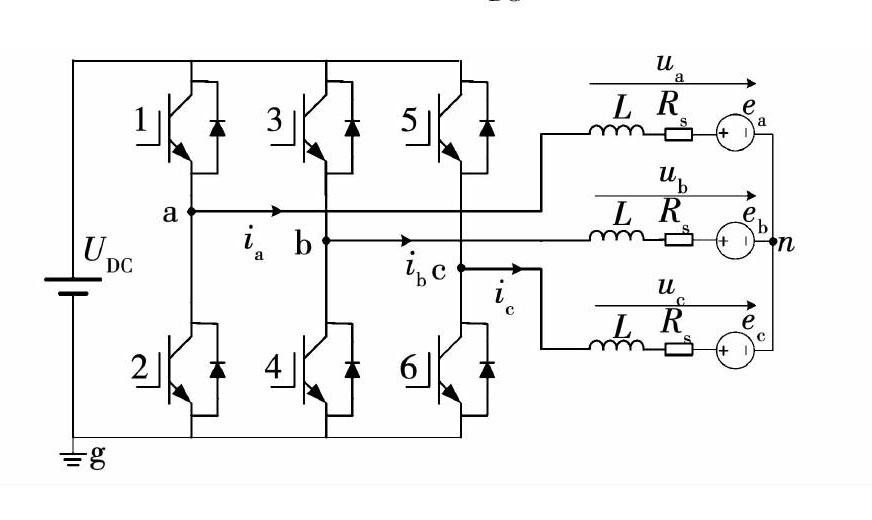
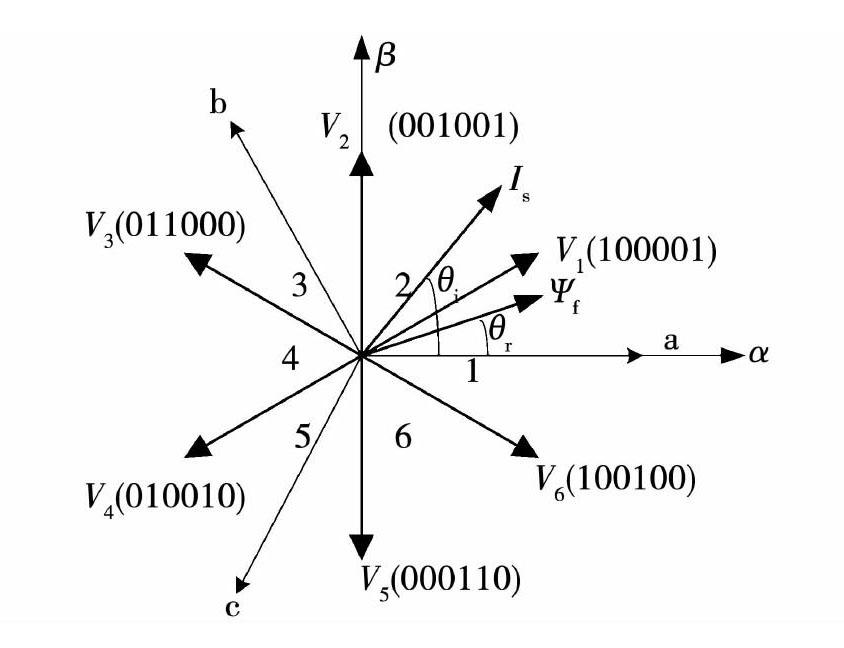
图1中,要实现转矩的直接控制最终还是要落实到电压矢量的确定和选择上。由于存在关断相,采用基于导通相相电压合成的方法得到两相导通BLDC电机电压矢量及扇区划分,如图2所示。图2中,电压矢量采用6个二进制数来表示图1中对应的开关管状态,以V1、矢量为例,其从左至右的二进制数值分别表示图1中对应的VT1-VT6开关管的状态,“1”表示导通,“0”表示关断,此外,图中还给出了转子磁链矢量ψf和两相导通BLDC定子电流矢量Is的示意,其中θ,为件真相对于α轴位置,θ1为Is与α轴之间的夹角。
对于两相导通BLDC电机,由于采用方波电流供电,且电流与反电势之间存在严格的对应关系,导致电流矢量位置θ1在一个扇区内保持不变,而转子位置在每个扇区内的变化范围均为60度。从式(5)可知,在转子位置和电流矢量位置一定时,定子磁链幅值和电机转矩之间存在着严格的对应关系,这种对应关系属于两相导通BLDC电机的固有属性,与采用何种控制方法无关,同时,这种对应关系也意味着:只要实现了对电机转矩的直接控制也就同时实现了对定子磁链幅值的直接控制,二者之间存在着一一对应的强耦合关系,这种强耦合关系也将对两相导通BLDC DTC的实现方法产生影响。
1.2两相导通BLDC转矩磁链强耦合特性对DTC控制的影响
为进一步分析非弱磁条件下磁链转矩强耦合特性对电机转矩控制的影响,式(5)中对电机转矩求偏导,得到下式
从概率角度分析,在大部分情况下定子磁链幅值和电机转矩保持同步变化,而在小部分情况下二者的变化方向相反,但无论是哪种变化规律,定子磁链幅值和电机转矩二者之间的强耦合关系始终存在,区别仅在于定子磁链幅值随电机转矩变化速度的快慢。从磁链和转矩控制角度看,转矩环控制了电磁转矩的同时定子磁链幅值也得到了控制,如果在这样一种强耦合关系的情况下再引入定子磁链幅值闭环,不仅理论上不合理,也会直接影响转矩控制效果。
考虑到实际双环控制过程中采样、计算和控制等误差的客观存在,如果当定子磁链幅值给定与电机实际转矩所对应的定子磁链幅值不一致时,磁链环就要求调整定子磁链幅值,但由于电磁转矩和定子磁链幅值的强耦合关系,这又会进一步导致转矩环重新调整,而这种调整极有可能与实际转矩控制要求相矛盾,最终影响系统的稳定可靠运行,因此,两相导通BLDC DTC磁链和转矩双闭环控制方案在理论上是不合理的,从转矩控制角度,由于电机转矩和定子磁链幅值之间的强耦合关系,磁链环是完全不必要的。
