机载LiDAR测量技术在潮间带测量中的应用
2019-12-03
(1.长江水利委员会水文局 长江口水文水资源勘测局,上海 200136; 2. 长江水利委员会 水文局,湖北 武汉 430010)
1 研究背景
我国滩涂面积大、分布集中,人类活动频繁,是海洋开发利用的宝贵资源。近年来,随着对海洋资源调查、海洋工程应用、海洋科学研究、海洋环境保护等方面需求不断增强[1],对沿海滩涂基础地理信息的需求也越来越大,已有的资料远远不能满足国民经济和社会发展的需要,迫切需要精度高和现势性强的滩涂测绘成果[2]。滩涂地形包括潮上带、潮间带和潮下带三大块区域。潮上带是大潮期最高潮位以上的部分,潮水无法到达的地方,高程相对较高,是比较干燥的滩涂,地质坚硬,人能涉足,通常采用陆地测量方法进行测量。潮下带是指大潮期最低潮位以下的水域,常年没有机会露出水面,通常采用水下测量的方法进行测量。潮间带是大潮最高潮位和最低潮位之间的潮浸地带[3]。
潮间带区域潮涨、潮落的潮位升降以及潮流往复于滩面,使潮滩出现淹没和露出水面的交替性变化。由于涨落潮潮差不大,使得高潮位时水深较浅,受吃水限制以及芦苇、水草、波浪的影响,船只能到达的区域有限;低潮时滩面露出,无论是淤泥滩还是草滩,人员、车辆上滩困难,如果滩上有涨潮沟,人、车安全得不到保障,潮间带的以上特点,给潮间带地形测量带来了极大的挑战。
为了得到潮间带地形,国内外测量人员付出了长期努力,然而受技术发展限制,目前的滩涂地形测量仍多采用传统的地形测量技术。在潮间带因落潮干出时,可借助全站仪或RTK测量技术开展滩涂地形测量[4]。全站仪或RTK地形测量虽技术成熟,但因滩涂淤泥较多,承载能力差等原因,该类方法的安全性、效率和精度均难以得到保障[5]。潮水上涨滩地被淹没时,采用吃水较浅的测船搭载GNSS定位系统和测深系统可以进行水下地形测量,但易受到海浪、测船吃水、渔网、水产养殖和其它外界因素的制约,地形测量作业常难以开展[1]。随着无人船、气垫船、全地形车等运动平台研发技术的发展,搭载常规仪器设备上滩开展潮间带地形测量成为可能。大量研究发现,无人船只能在风浪极小的海况下行进,且活动范围小;气垫船一旦出现故障,因滩涂淤泥松软,施救的安全性得不到保障;全地形车运载不便,且受滩地地形的限制,只能对小范围空白区进行修补,测量效率较低。无人机航空摄影测量虽可以遥测滩涂,但在开阔滩涂因特征贫瘠致使测量精度难以得到保障、在植被覆盖区因遮挡难以获得滩涂地形等不足。
同机载摄影测量一样,现代机载激光雷达(LiDAR)测量可以遥测滩涂,其激光可穿透植被而获得滩涂回波信息[7-9],为滩涂地形测量提供了条件。为此,本文将开展机载LiDAR测量技术在潮间带测量中的应用研究,解决淤泥质潮间带“船上不去、人下不来”的测量难题 。
2 机载LiDAR潮间带测量技术
机载LiDAR测量技术分两种:一种是由GNSS 定位、惯性导航 (INS)、单一波长在800~1 064 nm之间的红外激光器(SLR)集成的机载激光扫描系统,在滩涂地形测量中主要用于干出滩地形测量,可以直接获取目标点的三维信息[7](见图1);另一种是机载LiDAR测深系统(Airborne LiDAR Bathymetry,ALB),ALB测深是一种主动式遥测技术,激光器同时输出1 064 nm和532 nm双波长激光,1 064 nm激光形成地表和海表的回波,532 nm蓝绿激光穿透海水形成海底的回波[9],利用海面与海底反射激光到达接收器的时间差,加以系统校准、姿态改正、折射改正、潮位改正,计算出海底地形三维坐标[1]。
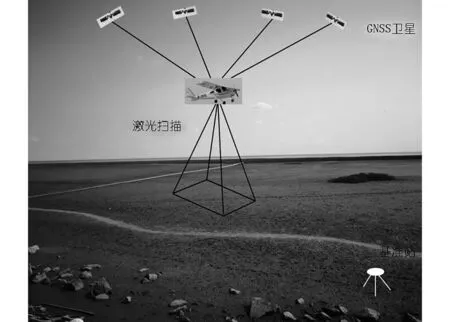
图1 机载LiDAR潮间带测量技术构成Fig.1 Composition of airborne LiDAR measurementtechnology in the intertidal zone
机载LiDAR 测量技术完全不同于摄影测量对地定位理论,是真正意义上的目标定位测量。通过GPS定位、INS测姿和SLR测距,直接获取目标三维信息,其高程测量精度可达0.15 m,满足《海道测量规范》要求[6]。机载LiDAR在沿海滩涂上测量无需布设控制网,受天气、太阳高度角和阴影的影响小,尤其是以无人机为平台的激光测量技术,大大提高了作业效率,减小了外业测量强度,安全系数高[8]。机载LiDAR测量技术集成了常规测量技术的优点,同时具备摄影测量的效率和人工实地测量的精度[7]。机载LiDAR 测深技术通过红外激光获得陆地及水面高程,蓝绿激光探测水底,形成海陆一体化双频探测,实现水上水下地形无缝拼接[10]。
2.1 机载红外激光测量技术
2.1.1 测量原理
机载激光扫描系统集成了GPS、INS 和SLR,利用飞行器作为平台,获取地面点三维坐标,快速生成DEM。当空间一个向量的向径为S,方向为(α,β,γ) ,测定起点坐标O(X0,Y0,Z0),此点到待定点P的矢量可以测出,该向量的另一端点Pi(Xi,Yi,Zi)的坐标可以根据已知点加矢量确定下来,如图2所示。而当S,α,β,γ,X0,Y0,Z0存在一定误差时,P点的位置也会在一个误差椭球内变化。

图2 机载激光扫描测量原理示意Fig.2 Schematic diagram of airborne laser scanningmeasurement principle
机载激光扫描系统利用激光扫描测距仪SLR按固定间隔向地面发射激光脉冲,测得地面点到投影中心的距离S;利用GNSS精确获取飞机平台位置,即投影中心的坐标(X0,Y0,Z0);再利用高精度的姿态测量装置INS获取投影中心处主光轴俯仰角α、侧滚角β、偏航角γ姿态数据(α,β,γ),观测方向与平台法线间角度φ由姿态数据与φ组成的矢量矩阵算出,X0,Y0,Z0,α,β,γ,S,φ都已知,则待定点Pi的坐标(Xi,Yi,Zi)可以确定:
据此获取每个激光扫描点的三维坐标,生成高精度数字DEM[7]。
2.1.2 在潮间带地形测量中的应用
2010年浙江省第二测绘院利用机载LiDAR测量技术完成了约2 000 km21∶10 000比例尺省内滩涂海岸地形测量[6];东营沿海滩涂应用机载LiDAR测量技术进行1∶10 000比例尺地形测量,获得平面误差在±1 m范围内DOM和高程精度在±0.25 m范围内的DEM[9];2013年底至2014 年初江苏省金威测绘公司用机载LiDAR组织实施了江苏滩涂1∶10 000地形图测量,制作了DEM、DOM、DLG 等标准测绘产品[11]。国内应用证明,机载LiDAR测量技术稳定、应用成熟[7],对滩涂地形图测绘优势明显。
2.1.3 无人机激光雷达测量技术

无人机激光雷达技术测量潮间带非常便利,但在实际作业中,设备会受到各种方面的影响,除GNSS信号失锁、惯性导航数据校准没有校准完毕等操作上和粗差上的问题之外,由于激光雷达设备本身的数据获取与处理特性会出现激光雷达扫宽受地表地质类型影像、植被覆盖区激光雷达回波判读、激光雷达数据水面数据判读、激光雷达数据的密度抽稀、数据可视化发布等问题。在进行海滩水面与滩涂连接处数据判读时,这就需要结合现场数据与表面判读来确定泥滩数据或水面数据。对植被覆盖地区特别是地表存在多层植被数据且一部分伏地植被时,地表的数据较难进行分辨,在进行数据处理时,需要结合现场情况合适使用断面工具并使用正确的断面宽度进行数据分析与分类。例如航带间隔为70 m,激光雷达设计扫宽为110 m,但实地测量在水分覆盖较大区域,实际扫宽约为40~70 m,对于不同滩涂类型使用不同宽度的航带布设以保证数据校准准确性与数据密度。红外激光只能测露出水面的干出滩,受潮涨潮落、潮大潮小的影响,要完整地测出潮间带特别是大潮低潮位才能露出的滩地必须要等待,而且有效时间很短,有一种不用候潮的双色激光测深系统能解决潮间带测量问题。

表1 测深仪与机载激光雷达测量结果比较Tab.1 Comparison of measurement results betweendepth sounder and airborne lidar m
2.2 机载LiDAR测深技术
2.2.1 测深原理
双色激光ALB系统利用搭载在飞机上的激光发射器经扫描反射镜斜向海面以扫描测量的方式发射红外光和蓝绿光两种不同波长的激光脉冲。波长为1 064 nm的红外光因不宜穿透海水而探测到水面后就回波,波长为532 nm的蓝绿光穿透海水时衰减最小,穿透性强而且方向性好到达海底,并被海底沿入射路径反射,最终被光学接收系统接收[10]。红外光和蓝绿光反射和返回的时间差结合蓝绿激光的入射角度、海水折射率等因素即可计算出测量点的瞬时水深值。再与定位信息、飞行姿态、潮汐数据等解算出测量点在地理坐标系下的位置和基于深度基准面的水深值[13]。如图3所示,蓝绿光入射角为φ,海水对蓝绿光的折射率k水和蓝绿光在空气中的折射率k空气,即可得出折射角δ:
(1)
再根据接收红外光与蓝绿光的时间差Δt和光在空气中的传播速度c,求取的水深值D:
(2)
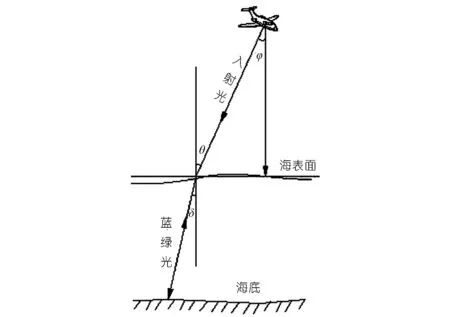
图3 机载激光测深原理示意Fig.3 Schematic diagram of airborne laser sounding principle
2.2.2 我国机载LiDAR测深的发展和应用
机载双频激光雷达探测技术利用双波长激光实现海陆一体化测绘,从1969年至今,国际上已经形成了成熟的商业产品,应用于海洋、岛礁、海岸带的探测。从1998年开始,中国科学院上海光学精密机械研究牵头开发机载海洋测深系统(1 064 nm和532 nm双波长);2002年,第一代机载双频激光雷达(LADM-Ⅰ)研制成功;2004年,第二代机载双频激光雷达(LADM-Ⅱ)研制成功;2015年,新的机载双频激光雷达工程样机(Mapper5000-S)研制成功,该系统在南海完成了3个架次的机载飞行试验,获得了海陆一体化的三维地形数据;2017年,成功进行升级改造,完成了Mapper5000的产品定型。2017年9月Mapper5000系统在南海开展了11个架次的样机测试机载飞行试验,获得南海岛礁的三维地形数据,陆地测点密度为0.25 m×0.25 m,海洋测点密度为1.1 m×0.1 m,最浅水深达到0.25 m,最大深度达到51 m,水平位置精度为0.26 m,测深精度为0.23 m(统计水深范围为7~45 m)[14]。
ALB系统的测深能力主要受到水体浑浊度的影响,通常情况下,海水越清澈,浑浊度越小,激光就更容易穿透海水,有效测深值则越大,2014年12月江苏省测绘工程院用CZMIL ( Coastal ZoneMapping and Imaging LiDAR) 系统在较为浑浊的江苏省骆马湖进行了测深试验。结果表明在高漫衰减系数、低底部反射率的情况下,CZMIL 系统成功探测到湖底数据,成果精度达到了CZMIL 系统标称的测深精度指标[13]。2012年底和2013年8月,国家海洋局第一海洋研究所在南海某岛海域分别采用optech公司的Aquarius系统和AHAB公司的Hawk EyeⅡ系统进行了机载测量实验,采集了水深和地形数据,实现陆地和海底的无缝测量[10],该系统弥补了声呐测深系统和地形雷达测量在海岸带作业的不足。
3 结 语
机载双频激光雷达探测技术作为一个高效率、低费用、机动性强的海陆一体化探测技术,已经成为滩涂、浅水水深测量的有效手段之一,将在我国海洋开发、海岸带测绘和环境保护等领域发挥越来越大的作用。同时也存在着一些现实问题,机载LiDAR 航飞空域审批困难,随着技术的进步,激光测深系统越来越小型化,将来用无人机搭载激光测深系统测量成为可能;由于激光无法穿透密集植被的缺点,可以选择在冬季植被落叶和收割结束后进行观测;激光波形处理困难,能否有效识别海表和海底的回波信号,正确分离近岸浅水回波中海表回波和海底回波是最小测深能力的体现。在回波探测与信号的提取方面仍有较大的提升空间。总而言之,随着未来我国海洋开发战略的实施和对海洋保护意识的提高,机载激光测深及其关键技术的研究必将受到更为广泛的关注。
