机载单绿激光水面穿透量估计及测深实践
2019-12-0323
23
(1.长江水利委员会水文局 长江口水文水资源勘测局,上海 200136; 2.上海市海洋环境监测预报中心,上海 200062; 3.上海河口海洋测绘工程技术研究中心,上海 201306)
机载激光雷达测深ALB(Airborne LiDAR Bathymetry)是一种快速、灵活、经济有效的浅水测量技术[1-4]。ALB根据采用的激光波长可分为双色激光ALB系统和单绿激光ALB系统[5-6]。双色激光ALB系统(例如Optech CZMIL、AHAB HawkEye Ⅲ、RIEGL VQ-880-G和Leica Chiroptera Ⅱ等)采用波长为1 064 nm的红外激光准确探测水面,波长为532 nm或者 515 nm(Leica Chiroptera Ⅱ系统)的绿激光探测水底。单绿激光ALB系统(例如Fugro LADS-MK3、Optech Aquarius、USGS EAARL-B和RIEGL VQ-820-G等)采用单一的绿激光探测水面和水底。
典型的绿激光波形包含3部分:水-气交界面回波、水体后向散射回波以及水底回波[7]。如果各回波部分准确,就可以采用单绿激光分别探测水面和水底,减少红外激光发射,这一方面会使ALB系统更加灵活方便,另一方面会显著降低ALB的成本费用。Guenther[1]指出,影响单绿激光测深精度的定位、定姿、波束角、往返程传播时间等问题目前已经得到较好地解决,绿激光在水面的不可靠问题是制约当前高精度测深的瓶颈问题。绿激光水面回波是水-气交界面回波与交界面下水体后向散射回波的线性叠加,通过对绿激光水面回波波形检测获得的水面点Q不能准确代表真实水面点P,而是穿透到靠近水面下一定深度处,称为绿激光水面穿透量(NWSP)[8],即绿激光水面点高程偏差Δd,这种现象称为绿激光水面不可靠问题,如图1所示。
对于双色激光ALB系统,其采用额外的不能穿透水体的红外激光代替绿激光来精确探测水面,实现高精度测深。典型双色激光ALB系统尽管测量精度较高,但系统体积重量大,使用起来不够灵活。为使系统更加经济灵活,单绿激光ALB系统只发射和接收绿激光。目前单绿激光ALB系统已被广泛研制和应用,单绿激光ALB系统更加经济灵活,但由于忽略了绿激光水面不可靠问题,导致水面、水底点高度存在偏差[6]。Guenther[7]理论分析了绿激光NWSP产生机理,采用测深雷达方程估计了水-气交界面回波和水体后向散射回波时间差。该时间差决定了NWSP大小,与水文参数(水体浑浊度)和ALB测量参数(波束扫描角和激光传感器高度)相关。该方法给出了绿激光NWSP影响因素及估计值。然而,理论分析法基于简单化假设,例如该方法中发射波形基于三角形脉冲波形,与实际高斯波形不一致。此外,测深雷达方程中诸多参数需人工给定,因此理论分析法需要进一步完善。Mandlburger[8]采用红外激光准确确定水面点高度为参考值,计算并统计分析了绿激光NWSP在河道和湖泊中的空间分布。实验表明,NWSP介于10~25 cm,且随浑浊度的增加呈现增大趋势。绿激光水面穿透量受水体浑浊的影响显著,为此有必要开展实验分析绿激光水面不可靠问题引起的水面点高程偏差,以实现基于单绿激光ALB系统的高精度测深。
1 研究方法
1.1 ALB测量原理
ALB测量原理如图1所示。
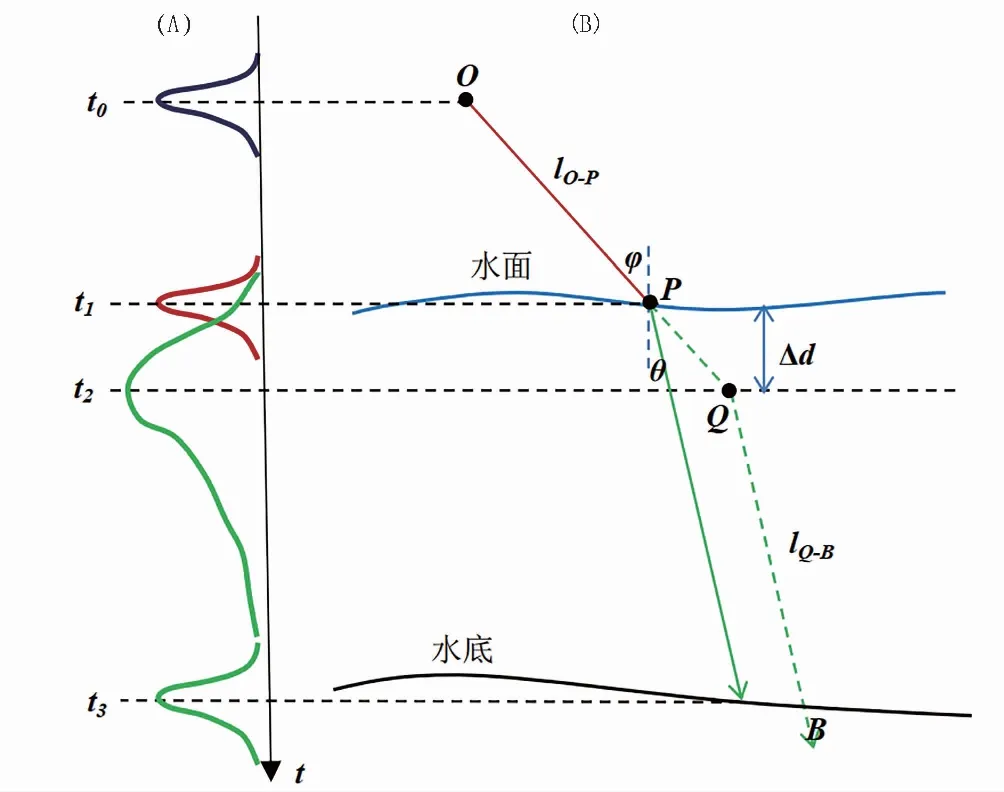
图1 绿激光水面不可靠问题Fig.1 The unreliability problem of green laser on water surface
图1中(A)表示发射波形和红外激光水-气交界面回波波形以及绿激光水面、水底回波波形。t0,t1,t2,t3分别表示激光脉冲发射时刻、红外激光获得的水-气交界面回波返回时刻、绿激光获得的水面回波返回时刻、绿激光水底回波返回时刻。(B)表示对应激光发射位置O、红外激光水面点P、单绿激光水面点Q。
在图1的(B)中,红外激光到达水面后经过水面反射产生水面回波,可实现对水面的准确探测。而绿激光到达水面后,部分经过水面反射产生水面回波,部分经过水面折射进入水体中继续传播产生水体后向散射回波,最后到达水底经过反射产生水底回波。如图1的(A)所示,由于绿激光水面回波是水-气交界面回波与交界面下水体后向散射回波的线性叠加,利用波形检测得到水面回波时刻t2相对真实时刻t1存在时间延迟Δt。Δt被误认为是绿激光在空气中的传播时间。相比绿激光在空气中真实的传播距离,利用绿激光水面回波检测计算获得的传播距离在原有传播方向上增加了cΔt的距离,其中c为绿激光在空气中的传播速度。由此获得的绿激光水面点Q并不能代表真实水面点P,存在高度偏差Δd,影响了基于单一绿激光的ALB测深精度。在图1的(B)中,红色和绿色实线为红外、绿激光的实际传播路径,而绿色虚线则表示了由于水面回波检测不准引起的单一绿激光传播的假想路径。
1.2 单绿激光水面点高程偏差修正
如果将真实水面点作为参考值,绿激光水面点高程偏差(Δd)可通过比较绿激光水面点高程和参考水面点高程获得:
(1)


(2)
(3)
式中,HS为水面高程,lO-Q,lQ-B分别为激光发射点O到绿激光水面穿透点Q的激光传播距离和Q到绿激光海底打击点B的距离;φ,θ分别为绿激光发射角和在水表的折射角。
2 实验及分析
2.1 试验区域
为验证和评估本文方法的正确性和有效性,采用Optech CZMIL系统于2014年12月在江苏省连云港市沿岸海域进行了ALB试验,试验水域水深变化约为2~4 m。CZMIL系统是Optech公司研制的最新型ALB系统之一,如图2所示。系统采用共线同步方式发射波长为1 064 nm的红外激光和532 nm的绿激光分别探测水面和水底[9-11]。系统技术参数如下。

飞行高度400 m(标称)飞行速度140 kts(标称)脉冲重复频率10 kHz圆形扫描频率27 Hz激光波长IR:1064 nm;green:532 nm最大可测水深4.2/Kd(底反射率 > 15%)最小可测水深< 0.15 m测深精度(0.32 + (0.013 d)2)1/2 m, 2σ水平精度(3.5 + 0.05 d) m, 2σ扫描角 20°(圆形扫描)条带宽度 294 m(标称)
CZMIL原始测量数据包括机体配置文件,绿激光、红外激光波形数据,空间位置和姿态数据,通过归位计算获得红外激光水面点,绿激光水面和水底点。

图2 Optech CZMIL系统Fig.2 Optech CZMIL system
2.2 绿激光水面点高程偏差修正
将测区2/3数据作为训练集,剩余1/3作为测试集。训练集用于采用统计方法求取Δd统计值,测试集用于评估修正精度。以红外激光水面点高度为参考值,利用公式(1)计算训练集每一脉冲的绿激光Δd值。统计结果如表1所示。可以看出,测区内绿激光Δd变化范围从0.8~48.90 cm,平均值为24.74 cm,标准差为5.91 cm。图3所示红色和绿色点云分别为单一条带内红外和绿激光水面点。绿激光水面不可靠问题引起的单绿激光水面点存在高程偏差,对测深精度产生了显著性影响,也进一步验证了本文开展单绿激光水面点高程偏差修正的必要性。

表1 单绿激光水面点高程偏差统计值Tab.1 Statistical value of elevation deviation ofsingle green laser water surface point cm
将统计分析获得的单绿激光ALB水面点高程偏差平均值作为修正值应用于测试集单绿激光ALB水面点高程偏差的修正。图4所示的蓝色点云为修正后的绿激光水面点云。相比修正前(图4中的绿色点云),修正后的绿激光点云更接近红外激光点云,绿激光水面点高程偏差得到了有效削弱。为了进一步量化分析改正前、后的绿激光水面点高程偏差,图5给出了各自的概率密度分布,表1给出了各自的统计量值。

图3 单条带红外和绿激光点云分布Fig.3 Single band infrared and green laserpoint cloud distribution
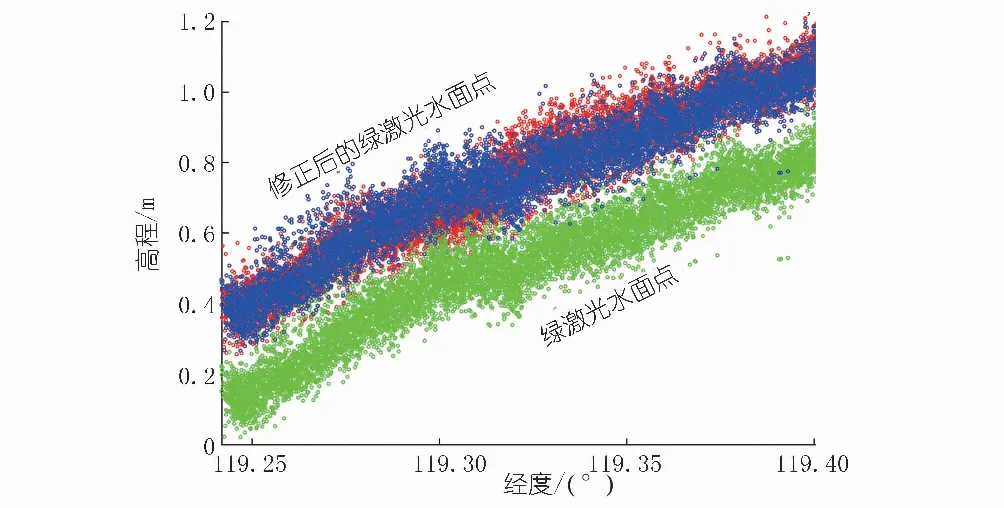
图4 修正前后的单绿激光水面点Fig.4 Single green laser surface point beforeand after correction

图5 修正前后概率密度分布Fig.5 Pre-correction and post-correction probabilitydensity distribution
由图5和表1看出,修正前水面高程存在明显的系统偏差,平均偏差达到24.7 cm;修正后,该偏差得到了较好地削弱,平均偏差达到0.28 cm,误差分布接近正态分布,有效地提高了最终测深成果的精度。
3 结论及建议
本文给出了一种基于外部参考的绿激光水面高偏差估计法,解决了绿激光水面不可靠问题。将该方法应用于实践,将绿激光水面点高程偏差由24.74 cm降低到0.28 cm,显著提高了系统的测深精度,为基于单绿激光ALB的高精度、低成本、高效、大范围浅水测深提供了全新途径。
本方法适合用于水体浑浊度近似一致水域。对于不一致水域,则考虑将整个测区划分为若干子区,子区内浑浊度近似一致,再在子区内采用本文方法开展绿激光水面高偏差估计和改正。
本方法在沿岸海域开展了应用,相对近岸海区,浅水湖泊水域具有较好的测量条件,取得了更高的测深精度。
