卫星大挠性结构抑制技术地面试验系统设计*
2019-12-03张桀睿聂钦博于常利夏红伟马广程王常虹
张桀睿,聂钦博,于常利,夏红伟,马广程,王常虹
(1.哈尔滨工业大学 航天学院·哈尔滨·150001; 2.上海航天控制技术研究所·上海·201109)
0 引 言
随着空间技术的发展,大型化、低刚度和挠性化已成为现代航天器发展的一个重要趋势。挠性附件的弹性振动导致姿态振荡甚至导致卫星姿态发散的事故在历史上有很多例子。因此,为了避免相应事故的发生,确保航天任务的万无一失,研究挠性结构对卫星主体的影响,在地面上进行物理仿真实验具有重大的意义。美国航天局[1]、荷兰的欧洲空间技术研究中心[2]、北京控制工程研究所[3]、哈尔滨工业大学[4-6]等研究机构均研制了地面全物理仿真平台,研究挠性结构对卫星主体的影响。
关于挠性结构抑制研究中需要解决一系列问题,比如:将反馈控制环节设计在什么位置能够取得较好的挠性振动抑制效果;如何消除重力场及工作环境的影响;怎样对挠性桁架进行数学建模[7-9]。结合桁架结构在实际工作中的情况,本文针对一类典型低频大挠性桁架结构[10]开展研究,设计了一种卫星大挠性结构抑制技术地面试验系统,给出了挠性抑制算法,并通过仿真验证了方法的有效性。
1 整体方案设计
1.1 系统主动控制方案设计
针对类似图1的一类低频大挠性桁架系统[7],本文的控制思想为:在大挠性桁架结构的连接处将其离散为有限个子系统,利用模态分析方法建立系统模型,控制器同时控制每个子系统,通过优化所选取的子系统的位置和数目,给出最优的控制方案。
桁架结构子系统的主动控制结构图如图2所示。将传感器和执行机构放置在适当的连接结构处构成闭环控制环节,不同连接结构处的闭环控制环节对不同的振型有控制作用。在本系统中,被控对象是低频大挠性桁架结构的某个桁架节点;传感器是加速度计和陀螺仪,将其测量出的物理量转换成该节点处的振动线位置和振动角位置;选用伺服电机作为执行机构来抑制该节点的振动。桁架结构的挠性振动得到抑制的表现是:当图1中系统的期望输入为零时,受到激励后,各节点处的振动位置曲线趋于零。

图1 低频大挠性桁架结构Fig.1 Low frequency large flexible structure
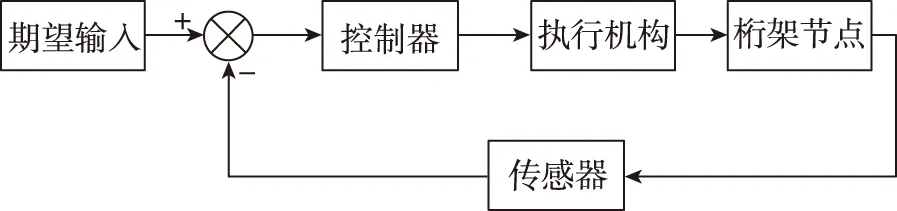
图2 桁架结构子系统主动控制结构图Fig.2 Active control structure diagram of truss structure subsystem
1.2 重力补偿方案设计
航天器的实际工作环境中并不存在重力,但地面仿真实验环境却存在重力场的问题。在对桁架模拟件进行地面仿真实验时,可以通过悬挂系统来实现对重力的补偿。
结合对国内外挠性结构抑制技术研究现状的分析,考虑到项目中的具体要求,通过有限元分析方法对比各种方案,本文采取将挠性梁主体竖直悬挂在固定边界上的方式(如图3所示)。与水平悬挂(支撑)的方式相比,竖直方向的悬挂方式能够模拟桁架结构在两个自由度上的挠性振动,更好地模拟航天器的实际工作环境。
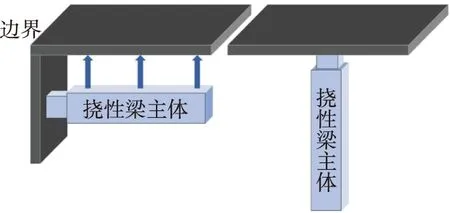
图3 悬挂方式示意图Fig.3 Schematic diagram of suspension mode
1.3 地面验证系统组成
为了模拟太空环境,减小外界环境对挠性桁架的影响,将挠性桁架放置于真空室中,工作人员在控制室对系统进行管控。通过MATLAB/xPC Target的双机运行模式和以太网连接实现无线通信。能够将控制算法无线下载到控制器中,实时监测系统状态,实时修改系统控制参数。
挠性模拟系统结构示意图如图4所示(以竖直向下方向为Z轴,根据右手定则建立坐标系)。挠性桁架系统主要由挠性梁主体,基于H型平台的激励发生装置,基于十字轴式万向节的二自由度力矩电机组以及基于十字导轨的二自由度伺服电机组以及陀螺仪、加速度计组成。
激励发生装置位于①处,结构如图5所示,是一个H型的直线电机二维运动平台,由三台直线电机和三条导轨组成,由直线电机3的导轨构成X轴,直线电机1、2的导轨构成Y轴。直线电机1与直线电机2的运动高度同步,电机与梁有一定的承重性能。
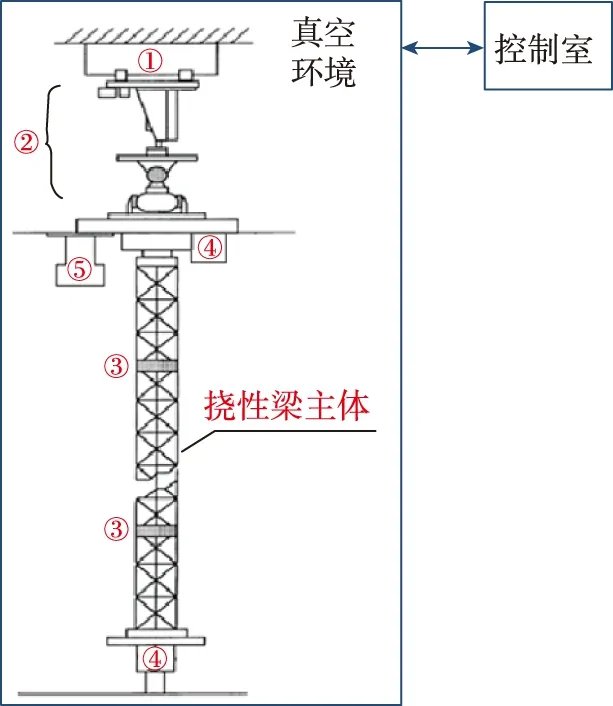
图4 系统结构示意图Fig.4 Schematic diagram of system structure
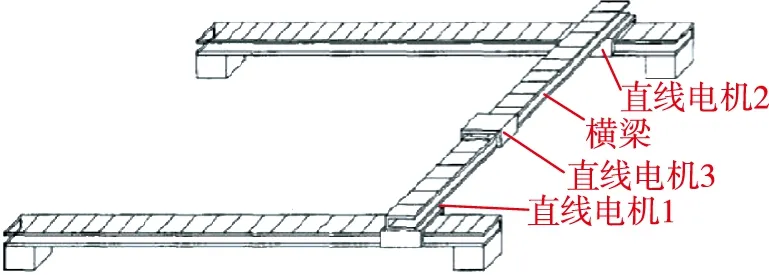
图5 激励发生装置示意图Fig.5 Schematic diagram of excitation generator
研究表明,当只在一对连接位置处施加控制作用时,在取得相近的振动抑制效果的前提下,在距离固定支撑位置越远的地方,所施加的控制力矩越小;而设置两对或两对以上反馈控制环节与设置一对反馈控制环节相比,振动抑制效果相同,但增加反馈控制环节的数目能够减小反馈作用力矩,在实际系统中可以解决执行机构输出饱和的问题[11]。因此,本文在分析桁架振型特点和执行机构输出能力的基础上,设计了基于十字轴式万向节的二自由度力矩电机组和基于十字导轨的二自由度伺服电机组作为执行机构,并将其放置在挠性梁主体的相应位置上[12]。
二自由度力矩电机组位于②处。十字轴结构如图6所示,4个力矩电机分别安装在十字轴的两个相互垂直的方向上(如图7所示),与④处(顶部)的二自由度陀螺仪形成闭环(与⑤处的配重块对应)。要求每两个相对方向的力矩电机运动高度一致,该机构能够输出绕X轴、Y轴转动的二自由度力矩。
二自由度伺服电机组位于③处,如图8所示,由两个导轨和两个伺服电机组成(每个伺服电机配备一个加速度计进行闭环控制),可以输出两自由度的力。
二自由度伺服电机组在挠性桁架上的安装如图9所示。
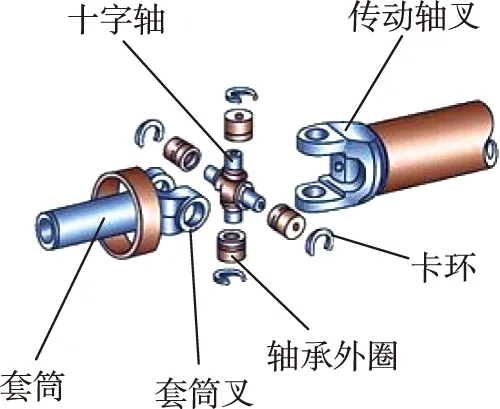
图6 十字轴结构Fig.6 Cross-axis structure
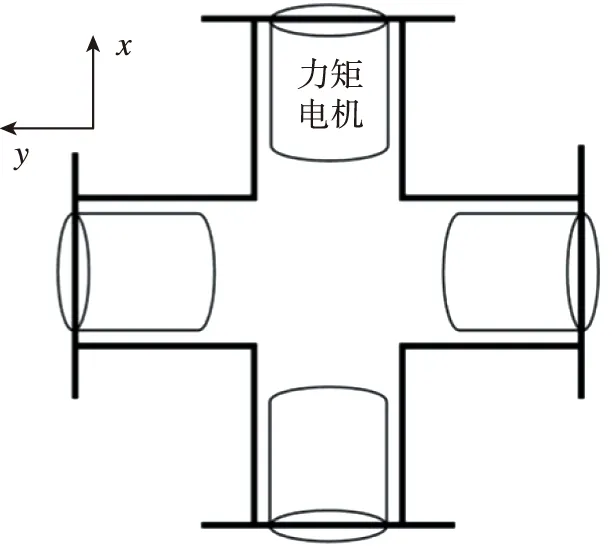
图7 力矩电机安装示意图Fig.7 Drawing for installation of torque motor
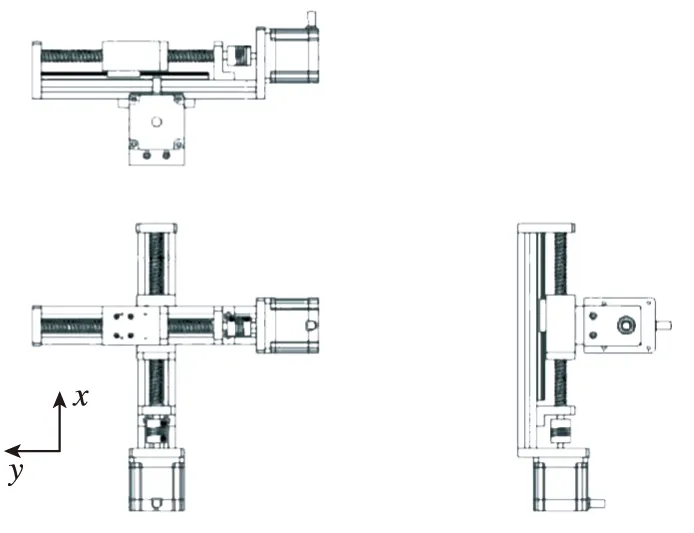
图8 二自由度伺服电机组示意图Fig.8 Schematic diagram of two-degree-of-freedom servo motor unit
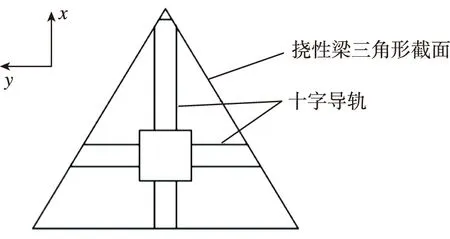
图9 二自由度伺服电机组安装示意图Fig.9 Installation schematic diagram of two-degree-of-freedom servo motor set
位于④处(底部)的加速度计和陀螺仪计算挠性桁架底部的运动状态,以此检验振动抑制效果。至此,本文给出了卫星大挠性结构抑制技术地面验证系统的整体方案设计。
2 基于模态分析方法的数学建模
2.1 挠性桁架的有限元模型
对低频大挠性桁架结构的振动进行抑制的前提是建立描述挠性结构振动的数学表达方式。本文利用有限元分析方法[13-14]建立某型号挠性桁架的有限元模型[15]。建立系统的振动微分方程并进行解耦。
2.2 多自由度系统的振动微分方程
对于单个挠性桁架节点,即单自由度弹性-阻尼系统,有

(1)
其中m为质点质量,u为质点位移,c为阻尼系数,k为弹性系数,f为合外力。
将其推广至多个桁架节点,即多自由度弹性-阻尼系统,有

(2)
其中M为质量矩阵,C为阻尼矩阵,K为刚度矩阵,u为位移向量,f为合外力向量。
由于式(2)的常微分方程组中各个微分方程相互耦合,无法得到传递函数。因此,要将此微分方程组解耦。
2.3 多自由度系统振动微分方程的解耦坐标变换
对于线性时不变的n自由度系统,系统任一点i的响应u均可表示为各阶模态值与模态坐标向量q的乘积,即各阶模态在这个位置产生的响应的线性叠加。
系统响应u和模态坐标向量q有式(3)的关系。
u=Φq
(3)
(4)
(5)
Φ为模态矩阵。由n个测点的振型值所组成的列向量φi,是第r阶模态向量。
将式(3)代入式(2)中,有

(6)
忽略阻尼影响,有

(7)
根据模态振型的正交性质,有
ΦTMΦ=E
(8)
(9)
将式(8)、式(9)代入式(7),有
(10)
实现了多自由度系统振动微分方程的解耦。
某型号挠性桁架部分模态振型特征参数如表1所示[15]。
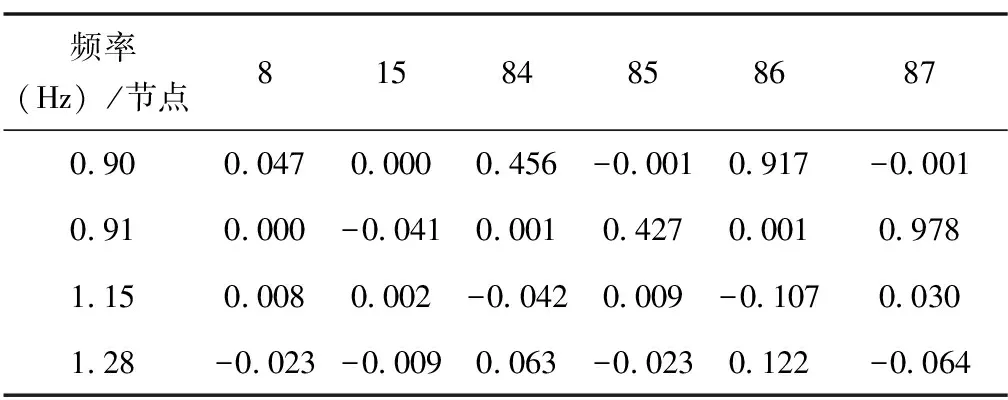
表1 某型号挠性桁架部分模态振型
取6个集中质量点,2个振动模态0.90Hz、0.91Hz进行分析,代入式(10)即可得到式(11)、(12)的系统振动微分方程。
(11)
(12)
本节对挠性桁架模型进行了简化分析,建立了完整的数学模型,下一节给出控制器的设计方法。
3 控制算法设计及仿真验证
3.1 比例-微分-积分控制律设计
在工程实际中,应用最为广泛的控制律就是比例-微分-积分(Proportion-Integral-Differential,PID)控制率。根据上一节推导出的数学模型,进行拉普拉斯变换得到系统的传递函数,搭建PID控制律数学仿真模型,仿真结果如图10、图11所示。图中ui为系统中第i个点的响应。
从仿真结果可以看出,PID控制律的控制效果不是很理想,超调量与震荡次数均较多,下一小节将进行线性二次型调节器(Linear Quadratic Regulator,LQR)控制律设计,可得到状态线性反馈的最优控制规律,构成闭环最优控制。

图10 PID控制律系统响应Fig.10 Response of PID control law system

图11 PID控制律系统响应Fig.11 Response of PID control law system
3.2 线性二次型调节器控制律设计
设有一状态变量均可测量的线性系统

(13)
其中,u为输入矢量,y为输出矢量,x为状态矢量,A为系统矩阵,B为输入矩阵或控制矩阵,C为输出矩阵。
设能量函数为
(14)
其中Q为半正定矩阵,R为正定矩阵。最优的控制轨迹应设计状态反馈控制器u=-kx,使该能量函数最小。
此时

(15)
将u=-kx代入能量函数(14)得到
(16)
为了求出K,不妨假设存在一个常量矩阵P使得
(17)
假设闭环系统稳定,将式(17)代入式(16)得到
(18)
(19)
取
K=R-1BTP
(20)
假设系统输入为零,将式(16)、(20)代入式(19),有
ATP+PA+Q+PBR-1BTP=0
(21)
求解式(21)的Riccati方程,代入式(20)即可解算出反馈矩阵K。
由于该系统的状态变量为模态坐标,不可以直接测量,无法进行LQR设计,所以需构建全维状态观测器。构建其超调量为5%,调整时间为0.5s,设计其极点为-16±12j、-300、-400。
取LQR的参数如式(22)、(23)所示,得到状态反馈K如式(24)所示。
R=diag(0.1,0.1,0.1,0.1,0.1,0.1)
(22)
Q=diag(10000,0,10000,0)
(23)
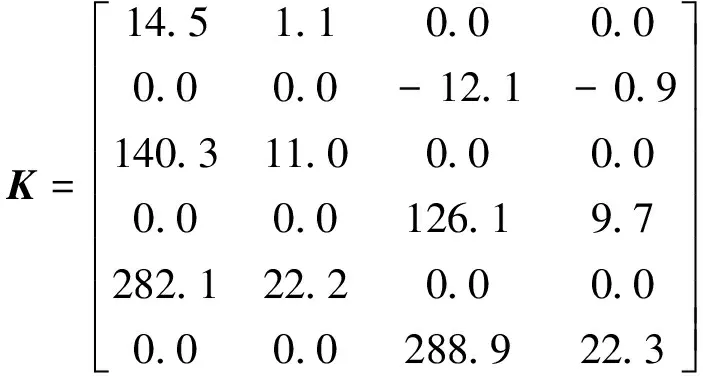
(24)
仿真结果如图12、13所示。
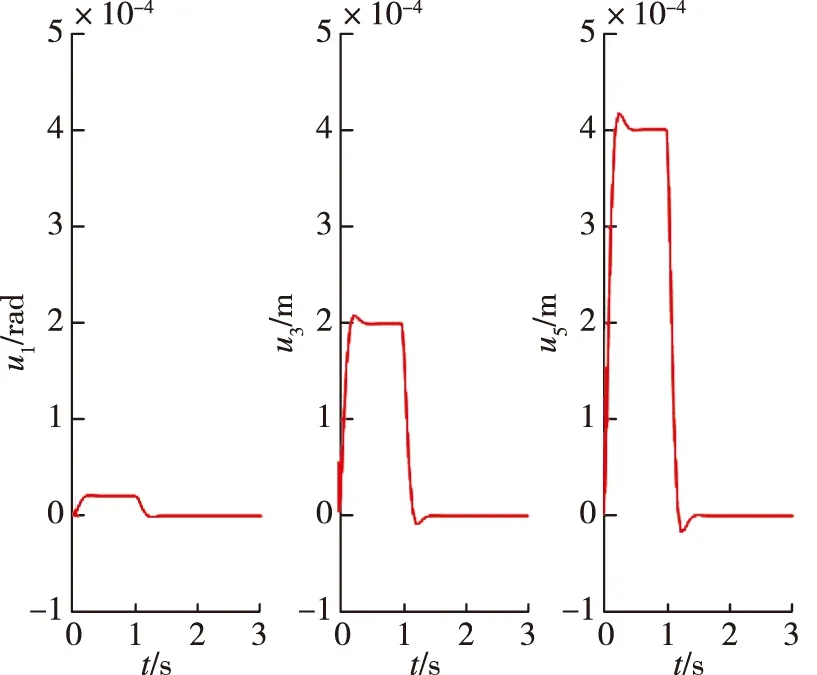
图12 LQR控制律系统响应Fig.12 Control law system response of LQR
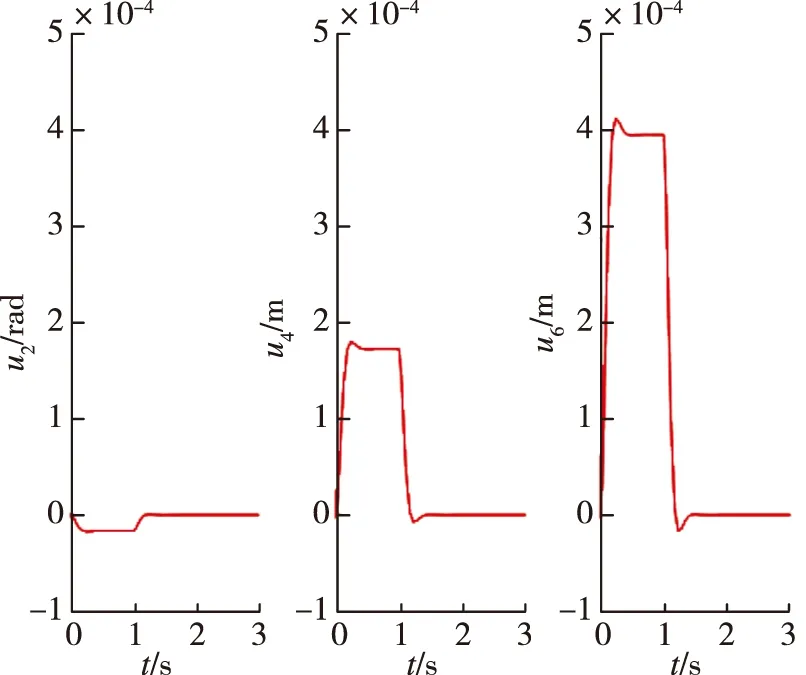
图13 LQR控制律系统响应Fig.13 Control law system response of LQR
由系统响应可知,与PID控制律相比,LQR能够取得更好的控制效果,超调量、振荡次数均大幅减少。
本节在建立了桁架结构数学模型的基础上,设计了PID控制律和LQR控制律。仿真结果表明,针对该多输入多输出的线性系统,LQR能够取得更好的控制效果。
4 结 论
本文针对低频大挠性桁架结构,给出了卫星大挠性结构抑制技术的主动控制方案,包括基于H型平台的激励发生装置,基于十字轴式万向节的二自由度力矩电机组以及基于十字导轨的二自由度伺服电机组;基于模态分析方法建立了挠性桁架的数学模型,并给出了PID控制律和LQR的设计与仿真,验证了本文方法的有效性。