基于偏差解耦扰动观测器的Fuzzy-PI逆变器电流环控制策略
2019-12-02丁娱乐赵树权李金航刘向辰
丁娱乐,赵树权,李金航,刘向辰
(1.昆明工业职业技术学院 电气学院,昆明 650302;2.昆明理工大学津桥学院 计算机信息学院,昆明 650101;3.中国航空工业兰州万里航空机电有限责任公司航空机电研究院,兰州 730000)
0 引 言
分布式发电系统在并网运行时,逆变器与电网互联系统容易出现谐波,影响其正常运行。文献[1]基于下垂控制对并网逆变器与电网组成的互联系统展开研究,采用虚拟阻抗法[2]来提高并网逆变器与电网组成的互联系统的相频裕度,提高了系统的稳定性。针对逆变器在并网时,频率同步震荡的问题,文献[3]将无源阻尼谐振峰值抑制方法应用到准比例谐振控制中,根据公共耦合点[4-5]电网阻抗参数的变化实时调节系统参数,保证了并网系统安全可靠运行。文献[6]以T型三电平逆变器为研究对象,对传统PSO[7-8]算法进行优化改进,提出一种自适应PSO算法,通过自适应PSO算法筛选出2组解,并讨论了不同解对抵消特定次谐波的性能,有效抑制了逆变器输出电流中谐波的污染。文献[9]提出一种并网逆变器开关频率保持不变的模型预测控制[10-11],该控制策略将最优开关序列作为模型预测的目标函数,通过求解目标函数的最优解来确定最优开关序列所在的扇区,减小了计算量的同时也提高了系统的静态性能和动态性能。
本文提出一种基于偏差解耦扰动观测器的L型逆变器Fuzzy-PI电流环控制策略。该策略是将电感参数变化时,dq轴间电流耦合引起的电压误差视为扰动量,利用扰动观测器估计出该扰动量并反馈至输入端,可以有效解决dq轴电流耦合问题;同时,为了提高系统的动态响应速度,用Fuzzy-PI控制替代传统PI控制,通过实验验证本控制策略可以提高系统的鲁棒性和动态性能。
1 偏差解耦扰动观测器
图1为传统偏差解耦控制原理图。

图1 传统偏差解耦控制原理图

(1)

由式(1)可以得到电流的传递函数为
(2)
其中,
2 基于偏差解耦扰动观测器的L型逆变器
为了解决偏差解耦控制中电感参数变化引起dq轴电流耦合问题,在偏差解耦控制中引入扰动观测器。该方法是将dq轴电流耦合和电感参数变化所造成的电压误差当做扰动信号,利用扰动观测器实时估算出该电压扰动信号,反馈到输入端,用于抵消扰动信号对系统造成的影响。基于偏差解耦扰动观测器的L型逆变器控制原理如图2所示。

图2 基于偏差解耦扰动观测器的L型逆变器控制原理图
图2中,1/(R+Ls)为L型逆变器实际模型、1/(Rs+Lxs)为L型逆变器标准模型。
对于扰动观测器的设计,Q(s)的选择非常重要,只有当Q(s)的相对阶次≥1/(Rx+Lxs)的相对阶次时,扰动观测器才能实现其功能。因此,Q(s)选用低通滤波器,其函数如下所示。
(3)
式中,Tf为时间常数,不同Tf对应不同的截止频率,本文取Tf=0.2 ms。图2中解耦表达式为
(4)
式中,U=(1-Q(s))(R+sL)+Q(s)(Rx+sLx)+G(s)。对式(4)进行整理,可得id、iq电流的传递函数为
(5)
其中,
在中低频段,令Q(s)=1,此时h2=h3=0且h1/Δ2=h4/Δ2=G(s)Gx(s)/(1+G(s)Gx(s)),说明即使存在干扰,系统输入与输出的传递函数依然是一个标准模型,dq轴间的电流耦合被有效抑制,证明系统具有较好的鲁棒性。
3 基于偏差解耦扰动观测器的L型逆变器Fuzzy-PI电流环控制
偏差解耦扰动观测器应用在L型逆变器中,可以有效抑制在电感参数发生变化时,dq轴电流的耦合效应,提高系统的鲁棒性,但G(s)作为一个传统PI控制器,虽然原理简单,容易实现,但其调节性能和调节时间之间存在矛盾,因此为了提高系统的动态控制能力,用Fuzzy-PI取代传统PI控制。Fuzzy-PI控制建立在模糊控制理论的基础上,将模糊控制理论、PI参数调节等信息应用到控制系统中。通过运用模糊推理对PI参数进行自动调节以获得最佳的控制参数,其结构如图3所示。
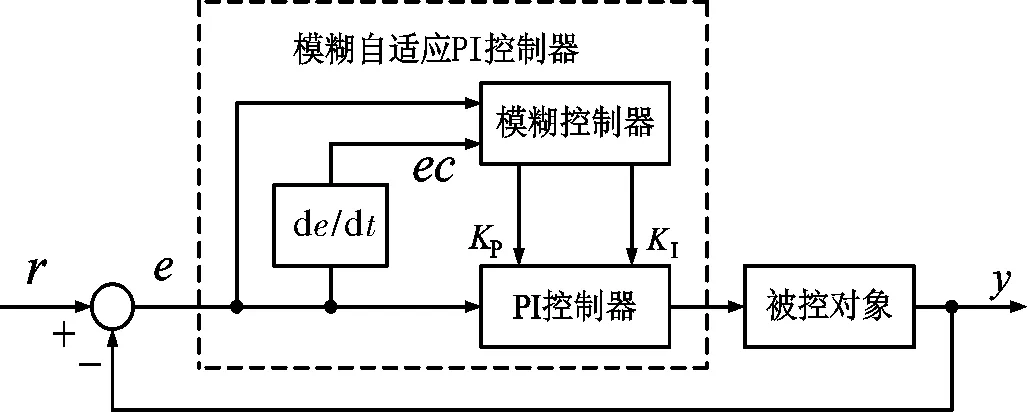
图3 模糊自适应PI控制原理图
根据系统的响应速度、超调量和稳态误差等要求,优化出一组初始PI参数,即KP0、KI0,并分析得到这三个参数对系统控制的影响;其次构建误差量e、误差变化率ec还有ΔKP、ΔKI等几个控制参数之间的模糊推理关系;最后,在计算过程中对误差量e、误差变化率ec进行在线检测,制定模糊规则实现模糊推理,通过实时查询模糊矩阵规则表对参数KP、KI在线整定,满足不同时刻的e和ec对控制参数的要求。
令ΔKP、ΔKI为模糊控制器的输出参数,那么模糊自适应PI参数整定为
(6)
式中,rP、rI为矫正速度。
图4为Fuzzy-PI控制器在线校正流程图,Fuzzy-PI调节器的作用需要通过不断的检测和ec,找出KP、KI与e和ec之间的模糊关系。

图4 Fuzzy-PI控制器整定流程图
基于偏差解耦扰动观测器的L型逆变器Fuzzy-PI电流环控制如图5所示。

图5 基于偏差解耦扰动观测器的L型逆变器Fuzzy-PI电流环控制原理图
在进行模糊推理前,先由系统的等效模型优化出初始的PI参数,即KP0=5.0、KI0=0.01;在根据Fuzzy-PI控制原理整定出对应的系数,即e=1.5、ec=2.5,在从模糊规则表中推算出控制参数ΔKP、ΔKI,最后计算出Fuzzy-PI控制器输出的实际参数。
4 实验分析
为了验证所提出方案的有效性,本文设计了基于TMS320F28335为核心的DSP控制系统,DS2004板卡负责数据采集,电力电子驱动板卡DS5202用于得到三相桥六个功率开关的驱动信号,示波器选择Tektronix公司的MDO4104B-3型示波器。实验平台结构如图6所示。逆变器控制PCB板如图7所示。

图6 实验平台结构简图

图7 逆变器控制PCB板实物图
图7中,右侧电路板为逆变器控制板,包括母线电压、母线电流采样、相电流采样;A/D转换;PWM输出等电路。左侧为逆变器驱动板,包括:软上电电路、IGBT驱动电路等。
逆变器主要参数如表1所示。
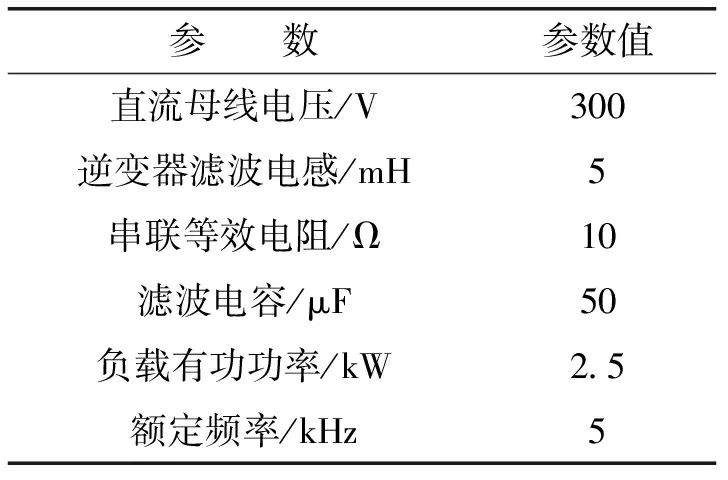
表1 逆变电路系统参数
4.1 dq轴电流解耦特性分析

图8 基于传统偏差解耦控制下的dq轴电流波形
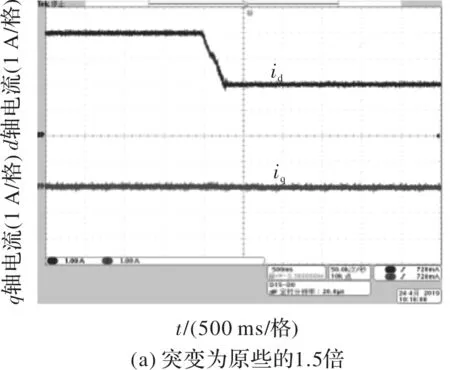

图9 基于偏差解耦扰动观测器的L型逆变器Fuzzy-PI电流环控制下的dq轴电流波形
4.2 输出电流动态特性分析

图10 输出电流动态特性分析图
从图10(a)可以看出,基于偏差解耦扰动观测器的L型逆变器PI电流环控制下的a相输出电流调节时间为41 ms。从图10(b)可以看出,基于偏差解耦扰动观测器的L型逆变器Fuzzy-PI电流环控制下的a相输出电流调节时间为30 ms。证明了本文所提出控制系统在d轴参考电流发生突变时,具有良好的动态响应速度。
5 结 语
本文提出一种基于偏差解耦扰动观测器的L型逆变器Fuzzy-PI电流环控制策略。
通过实验分析得到本文所提方案可以有效解决dq轴电流耦合问题基于偏差解耦扰动观测器的L型逆变器Fuzzy-PI电流环控制系统不仅在电感参数发生变化时,能够有效抑制dq轴电流之间的耦合问题;并且在d轴参考指令电流发生突变时,仍然能够保证良好的动态特性。
