基于均值漂移与空间信息的导向模糊C均值遥感图像分割算法
2019-12-02
(中国民用航空飞行学院空中交通管理学院,四川 广汉 618307)
0 引言
图像分割是将图像划分为若干个具有独特性质区域的过程,在计算机视觉领域诸多分支中获取了广泛的应用[1]。在对遥感图像的分析过程中,分割方法应该考虑数据采集方面的信息,诸如光谱和空间分辨能力等[2]。作为一种无监督学习算法,模糊C均值(fuzzy c-means,FCM)在图像分割领域获取了广泛的成功,其通常比硬聚类算法更加灵活。尽管传统的FCM因其完美的数学理论在诸多方面尤其是图像分割领域得到了广泛的应用[3-15],然而在图像分割过程中该方法亦存在对初始聚类中心敏感以及对噪声鲁棒性不强等问题。
为了克服传统FCM算法在图像分割中噪声鲁棒性差的问题,许多学者利用图像空间信息对FCM进行了改进,使得图像分割性能大大提高[3-8]。考虑到传统的FCM没有结合分析图像的形状等先验知识,Ahmed等通过引入邻域信息提出了基于空间信息的FCM算法(Fuzzy clustering with spatial constraints, FCMS),克服了传统方法对异常点敏感的局限性[3]。FCMS方法计算复杂度较高,尤其是处理尺寸较大时相当费时。鉴于FCMS方法运算复杂度高的问题,Chen和Zhang等[4]利用均值滤波和中值滤波对FCMS进行了优化,提出了FCM_S1和FCM_S2算法降低了计算复杂度。文献[6]基于核函数,通过对FCM的各个模块进行独立赋值,提出了基于领域信息的核广义模糊均值聚类算法(Kernel generalized fuzzy c-means clustering with spatial information, KGFCMS),提升了图像分割性能。Yang等[10]通过引入单一数据点至隶属度函数提出了一种新的目标函数,提高了图像分割过程中抗噪声能力。文献[12]利用领域灰度异质结构和上下文信息提出了自适应约束的核模糊C均值(adaptively regularized kernel-based fuzzy-means clustering, ARKFCM)方法。未解决FCM方法鲁棒性问题,Tao等[14]基于形态学重构和隶属度函数滤波提出了快速鲁棒模糊C均值方法(fast and robust fuzzy c-means clustering, FRFCM)方法,大大提高了图像分割性能,FRFCM被证明为当前最优的图像分割算法。
尽管基于FCM的系列优化算法在图像分割领域中已经表现出了良好的性能,但是边缘保持和去噪仍是待解决的问题。利用FCM对图像分割的主要困难在于这类方法对噪声非常敏感并且难以保持清晰的图像边缘[4,7-9]。滤波技术已广泛用于计算机图形、图像和视觉等诸多领域。其中,导向滤波器[16]是用于边缘保持平滑的一种优秀方法,该滤波器的优点在于边缘保持平滑的计算复杂度不依赖于滤波器尺寸。导向滤波器可以有效地平滑区域噪声,并产生视觉上令人满意的边缘轮廓。相对于双边滤波器,导向滤波器在边缘附近能得到更好的输出。因此,导向滤波器现已成为图像处理、特征提取和目标识别等计算机视觉应用领域的重要技术。考虑到分割任务之一是抑制噪声并强化重要结构特征,在图像分割处理中本文通过结合空间信息将导向滤波引入到FCM的目标函数中来进行模糊聚类。如果导向滤波器可以有效地抑制梯度翻转导致的伪像并产生良好的视觉边缘轮廓,本文认为利用该滤波技术FCM在分割图像时可以获得更准确的图像分割。同时,考虑到图像分割的性能在一定程度上依赖于初始的聚类数目和聚类中心,本文利用均值漂移算法[17]选取合适的聚类数目作为参考。与当前主流方法KGFCMS、RFCM、ARKFCM和FRFCM对比,实验结果证明了本文所提算法的有效性。
本文的其余部分安排如下。文中的第二部分描述了一些相关工作基础。第三部分详细介绍了本文所提的图像分割算法。第四部分给出了该算法的实验结果。最后一部分对本文进行了总结。
1 相关工作基础
1.1 FCM
(1)
(2)
最小化目标函数:
(3)
可以获得J的局部最小值。在上式中,m是大于1的实数,‖·‖代表欧几里德范数。
FCM是一种自动对图像数据进行聚类的方法,其本质上利用欧几里德范数计算像素点与聚类中心的隶属度,进而判别每个像素点属于各个模式的程度。与引入模糊划分相适应,FCM引入的模糊隶属度介于0和1之间,所以其比硬聚类分析更加灵活地分析图像的不确定性和复杂性。
1.2 基于空间信息的FCM算法
FCM算法进行聚类时仅考虑了像素的特征向量而忽略了相邻像元间具有空间关系,有鉴于此Ahmed等人[3]利用图像空域信息约束作为惩罚函数FCM 算法进行了优化和改进,提出FCM_S方法以提高图像分割性能。但FCM_S方法在每一次迭代过程中需要计算一次邻域项,算法的时间复杂度较高。为解决FCM_S 算法复杂度高和精确性不足问题,Chen等人[4]在此基础上通过引入邻域均值和邻域中值滤波代替邻域项,提出了FCM_S1和FCM_S2算法,得到了广泛的应用。本文采用基于邻域均值的FCM_S1算法,其目标函数如下:
(4)
其中,α是控制图像非局部均值滤波项的参数。以类似于传统的FCM算法, 利用拉格朗日乘子法对公式(4)的目标函数J求极小值,可求得聚类中心和隶属度更新公式:
(5)
(6)
尽管FCM_S1/2方法较好地融合了领域信息,相对于FCM以及FCM_S实现了在分割性能以及运算速度方面的提升,但该方法亦存在缺乏对图像边界的平滑约束、对抗图像区域强背景噪声以及对初始聚类中心敏感等问题。
2 基于均值漂移与空间信息的导向模糊C均值遥感图像分割算法
2.1 导向滤波器
导向滤波器[16]定义为局部线性滤波过程, 包括引导图像I、输入图像p和输出图像q。导向滤波器的关键假设是q和I为局部线性关系:
qi=akIi+bk, ∀i∈wk,
(7)
式中,i是像素的索引,wk为以像素k为中心半径为r的窗口。为了确定线性系数(ak,bk),建立目标函数E(ak,bk)在窗口wk中最小化q和滤波器输入p的差值:
(8)
其中:ε是控制平滑度的正则化参数。公式(8)的结果可以通过下面的线性回归得到:
(9)
(10)
这里,μk和σk分别为窗口k中I的均值和方差。基于上述,导向滤波器的输出结果为:
(11)

图1为导向滤波的过程,对输入图像p和输出图像q建立图中模型可提取图像中诸如噪声等非感兴趣信息n。
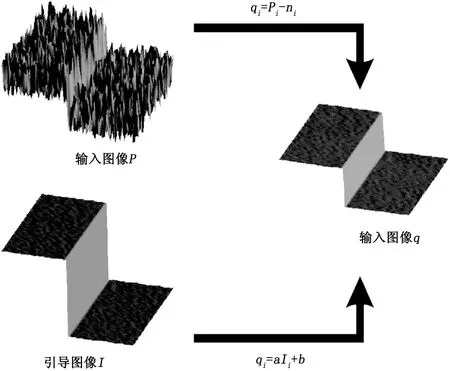
图1 导向滤波的过程[16]。
2.2 均值漂移算法
均值漂移算法[17]的关键思想是其自适应地寻找概率密度极大值的估计方法,不需要任何先验知识。具体利用感兴趣区内数据密度变化计算和搜寻中心点的漂移向量,通过迭代移动中心点直到到达密度最大处,进而得到感兴趣区域内的数据的次数。对于给定d维空间Rd中的n个样本点X={x1,x2,…,xn},基于高斯核的均值漂移向量形式为:
(12)
新漂移中心为:
(13)
均值漂移算法本质上即为在每次迭代的时候求解一个向量,使得圆心向数据集密度最大的方向移动进而与局部极值点重合,图2对这一过程进行了描述。
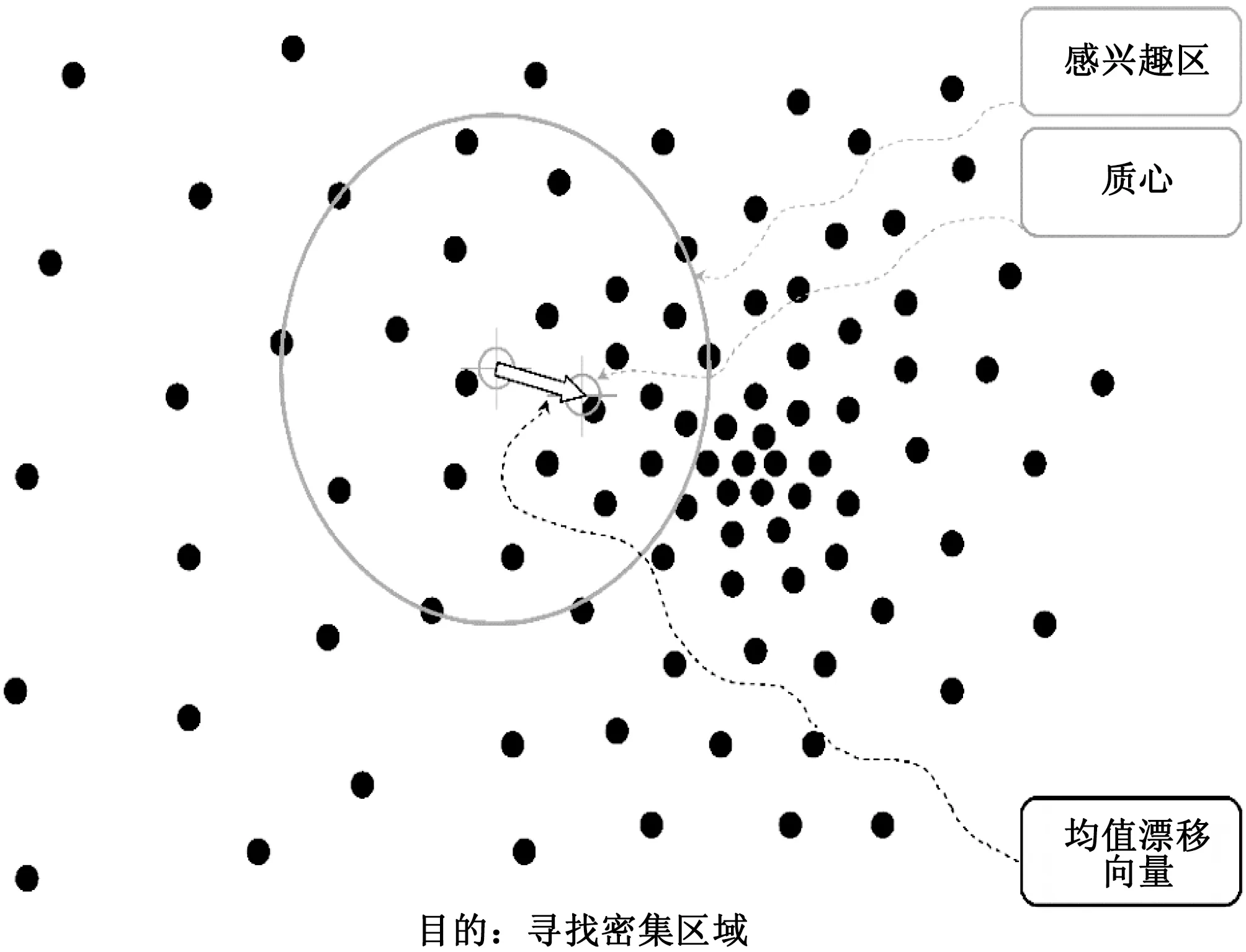
图2 均值漂移过程描述(图片来源:http://www.cse.psu.edu/~rtc12/CSE598G/introMeanShift.pdf)。
2.3 基于空间信息的导向模糊C均值聚类方法
以均值漂移算法选定的初始聚类中心作为参考,本文通过结合空间信息和导向滤波提出了基于均值漂移和空间信息的导向模糊C均值聚类方法(Guided fuzzy c-means clustering with spatial information, GFCM_MS),旨在消除噪声和保持边缘细节。基于FCM_S1方法,通过迭代更新聚类中心V=[vj]和隶属函数U={uik}:
(14)
(15)
最小化GFCM_MS目标函数:
(16)

相对于其他FCM系列图像分割算法,本文所提出的GFCM_MS具有如下优势:
1)GFCM_MS的优良边缘保持特性,通过实现图像边界的平滑约束得到了光滑的分割边界,使得不连续的原本属于同一类像素点聚连一起形成具有实际意义的子图;
2)GFCM_MS对噪声的鲁棒性,划分空间推广到可能性划分空间可实现强噪声背景下图像的理想分割效果(详见实验结果);
3)GFCM_MS利用均值漂移初始化了聚类中心,迭代次数少、计算复杂度小、收敛速度快,进而较好地降低了算法陷入局部最优的可能性。
2.4 基于GFCM_MS图像分割方法
本章提出的GFCM_MS算法的步骤如表1所示。
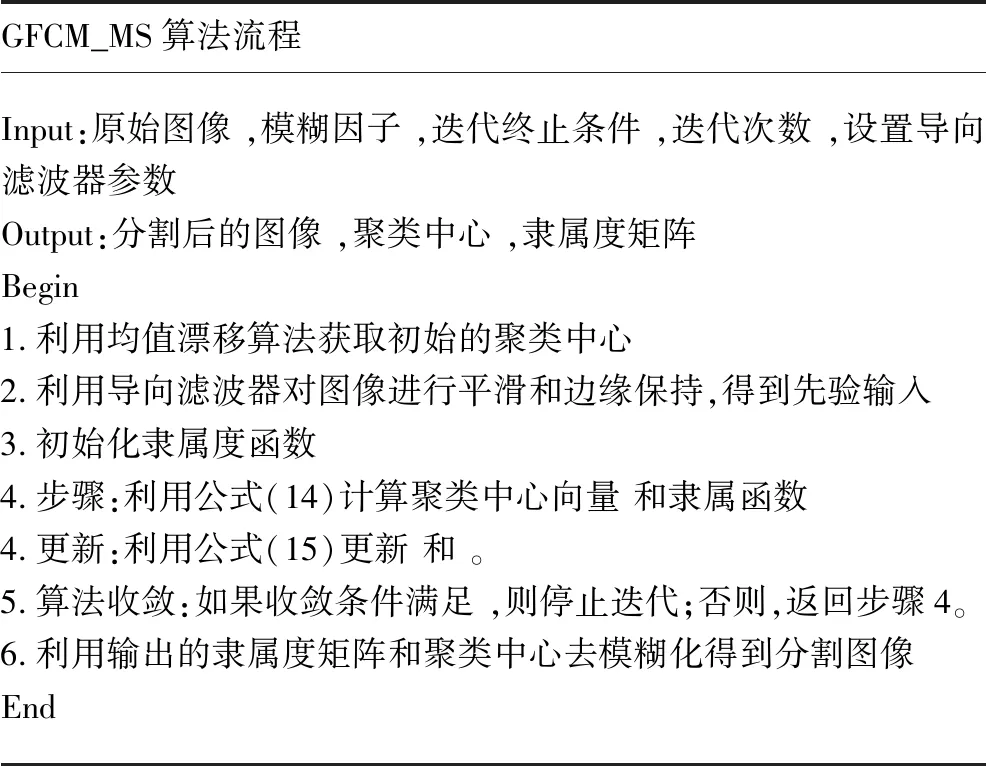
表1 GFCM_MS算法的步骤
3 实验结果与分析
为了对GFCM_MS算法的性能进行评估,本文考虑了RFCM[10]、KGFCMS[6]、ARKFCM[12]和FRFCM[14]方法,并建立了对比实验,数据集包括1个合成图像和3个真实图像。本文使用分割精度(segmentation accuracy, SA)[8]作为评估指标,分割精度SA定义为所有分类正确像素点数目与所有像素点数目比值:
(17)
其中:c为聚类数目,Ai表示属于第i类的像素的数目,Ci表示表示实际中属于第i类的像素的数目。
3.1 合成图像
在本节中,本文利用合成图像对算法的图像分割性能进行评估,该合成图像包含4个模式。使用合成图像来验证分割方法性能的优点在于合成数据包括了图像实际模式以及噪声参数控制等的先验信息。
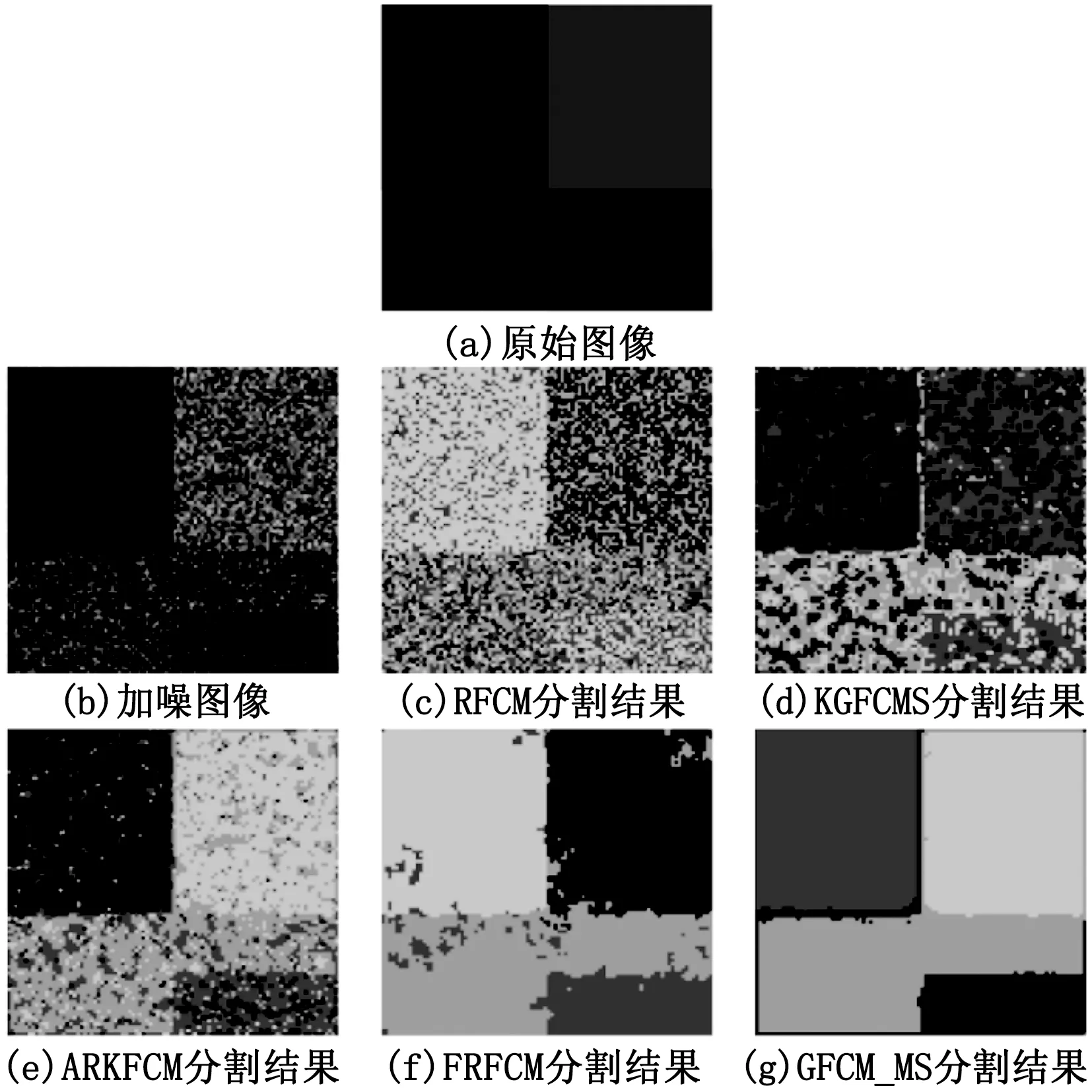
图3 加噪合成图像(方差为0.01高斯噪声)的分割结果比较

图4 加噪合成图像(方差为0.02高斯噪声)的分割结果比较
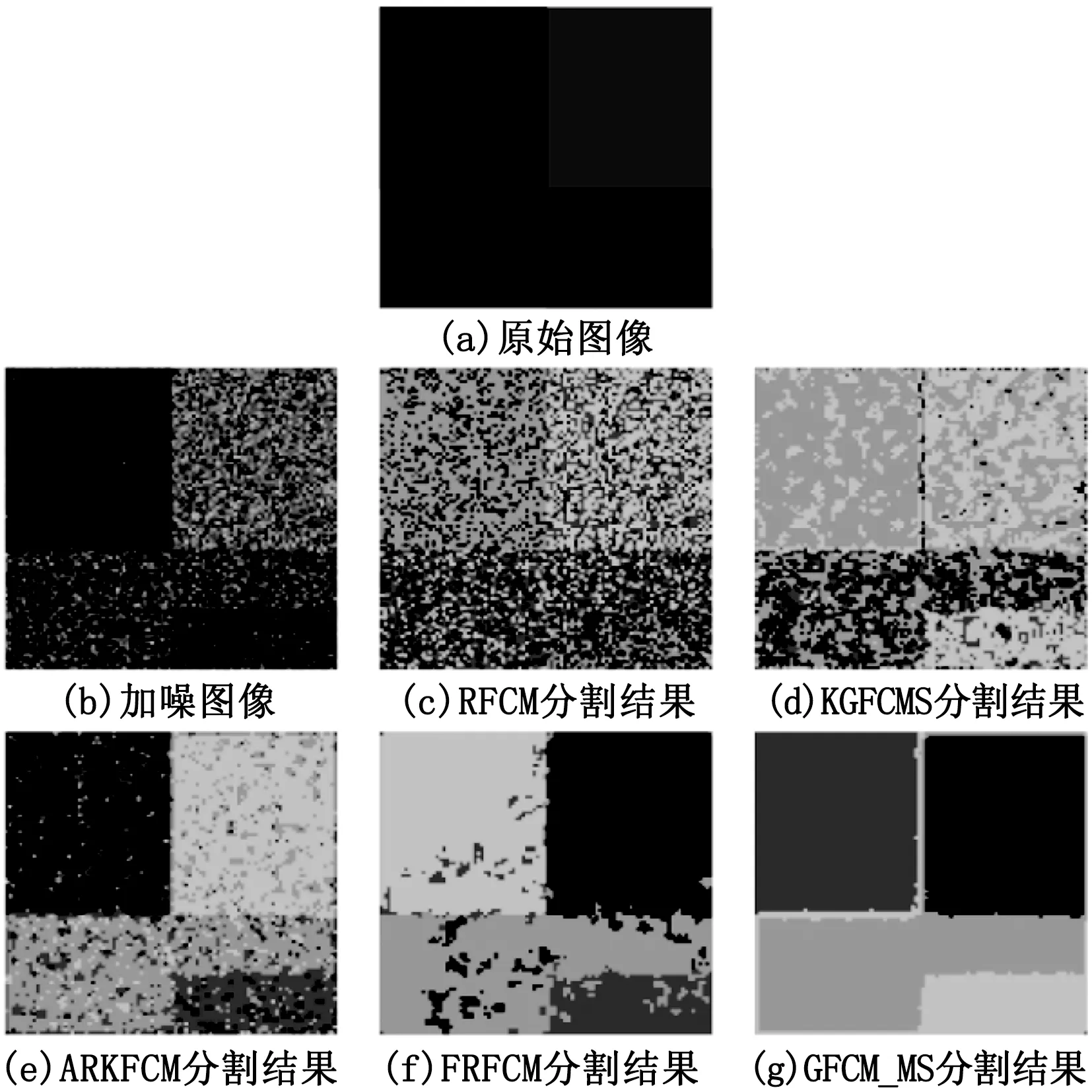
图5 加噪合成图像(方差为0.05高斯噪声)的分割结果比较
图3~5分别显示了各方法对加噪合成图像(分别加入方差为0.01、0.02和0.05高斯噪声)的分割结果。从图中可以看到,RFCM、KGFCMS、ARKFCM和FRFCM对噪声较为敏感,不同区域边界模糊,错分点较多。在GFCM_MS所实现的结果中,错分点很少,区域边界比较清晰,因此该算法对高斯噪声具有鲁棒性,得到了满意的分割结果。表2给出了不同方法对加噪合成图像分割所得到的分割精度SA。由表中的SA可以看出,FRFCM方法表现出较高的精度,但该方法随着噪声强度的增加其分割精度逐步下降。GFCM_MS对不同强度噪声表现出很好的鲁棒性,较大程度上抑制图像中噪声,分割精度始终保持>0.94。综合图3~5和表2,GFCM_MS分割性能明显优于其他方法。
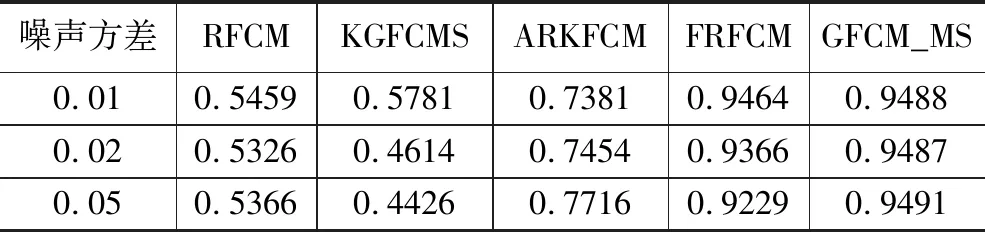
表2 不同方法对加噪合成图像分割所得到的分割精度SA
3.2 真实图像
图6显示了不同方法对遥感图像(航空港)分割结果。由图6可以看出,RFCM、ARKFCM和FRFCM对不同区域进行了一定的保持,但由于受噪声影响这三个方法在聚类区域内部都或多或少地出现了孤立的噪声点。而GFCM_MS方法对两个区域进行了较好的保持,分割的区域均匀性良好而且区域之间的边界清晰,没有孤立的像素点。
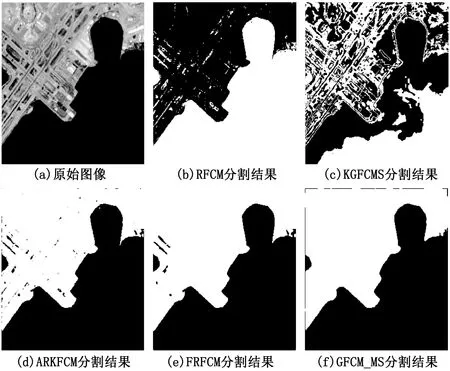
图6 遥感图像(机场)的分割结果
不同方法对遥感图像(桥梁)的分割结果如图7所示。图中的目标区域桥梁,属于“细长”模式。从视觉角度,RFCM、KGFCMS、ARKFCM和FRFCM没有很好地实现对图像的分类,桥梁与水域部分产生了较大的混叠,错分比较严重,对桥梁这种“细长”模式无法实现正确的聚类连接。由于GFCM_MS引入了导向滤波信息和空间信息,使得分割结果在保持大量图像细节的同时获得比较干净的同质分割区域,桥梁和水域之间不存在其他方法所得到的错分问题,获得了令人满意的分割结果。

图7 遥感图像(桥梁)的分割结果
图8展现了不同方法对遥感图像(河流)的分割结果。在该测试图像中,RFCM、KGFCMS和ARKFCM方法对河流、陆地和冰川3个区域的分割中,存在大量的错分。相对于RFCM、KGFCMS和ARKFCM,FRFCM方法给予了较好的划分,不同区域边界相对清晰。而本文所提出的GFCM_MS则保持了清晰的图像边缘以及更多的细节,图像分割更加准确,尽管有若干孤立的像素,但其区域均匀性和边界定位都令人满意。
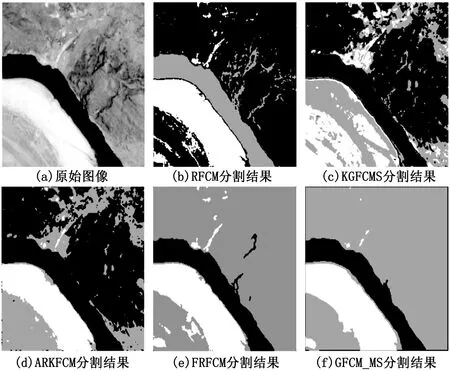
图8 遥感图像(河流)上的分割结果
图9比较了不同方法对遥感图像(航空器)的分割结果。RFCM、FRFCM和GFCM_MS在对该测试图像的分割中获取了较为清晰的边界。相对于RFCM和FRFCM,GFCM_MS机翼和垂直翼之间的机身边界定位更加准确。
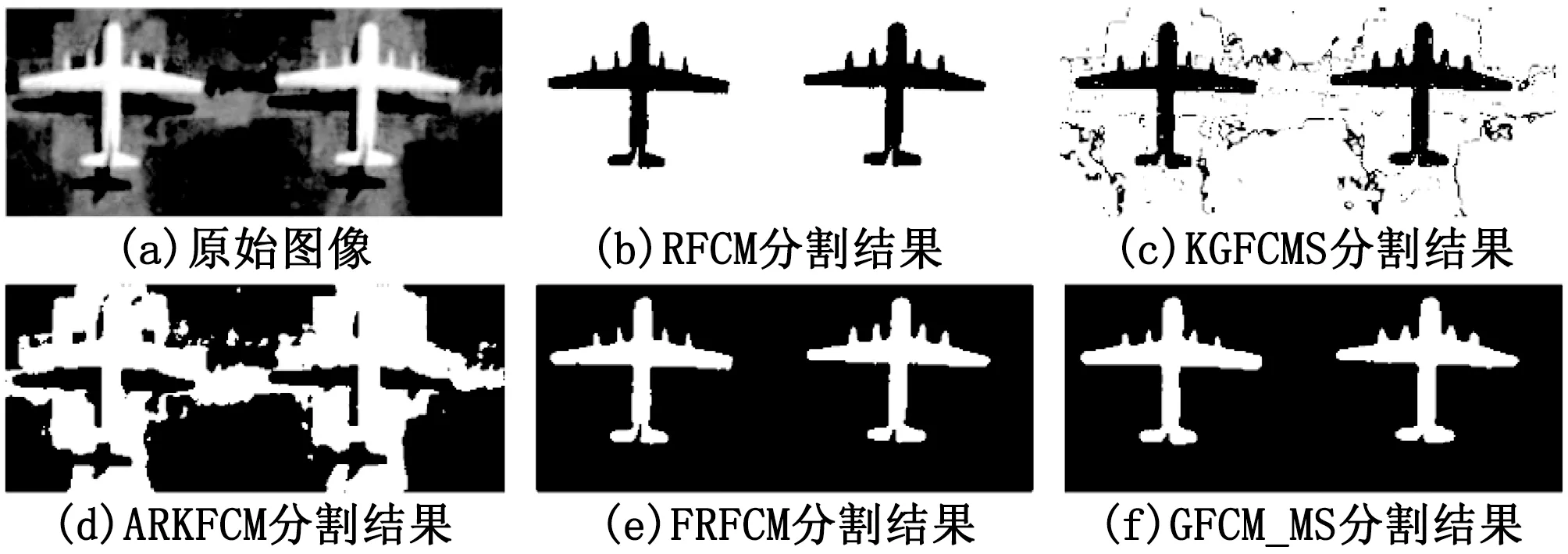
图9 遥感图像(航空器)上的分割结果
4 结束语
图像分割是计算机视觉领域的一个重要问题,模糊聚类因其特有的描述形式比其他传统的分割算法更具优势,因此得到了广泛的应用。本文提出了一种有效的遥感图像分割方法,该方法较好地结合了聚类分析和导向滤波技术对图像分割的优势:一方面,该方法较好地对聚类的图像边界进行了平滑约束,获得了平滑和封闭的分割边界;另一方面,该方法因其对噪声的鲁棒性,提高了强噪声背景下图像分割的准确度;最后,通过结合均值漂移所导出的初始聚类中心,降低了算法陷入局部最优的概率。基于导向滤波技术,本文所提出的方法通过结合均值漂移和空间信息,使得像素在组合的特征空间中得到更加准确的表达。实验结果表明,本文所提出的方法提升了图像结构被噪声损坏的分割准确度,该算法所得到的测试结果在可接受范围之内。本文的后续工作将围绕复杂场景分类问题开展研究。