车载导航接收机性能测试与分析
2019-11-30窦汝鹏孙佳骏吴飞燕
窦汝鹏,孙佳骏,吴飞燕
(中国汽车技术研究中心有限公司,天津 300300)
智能网联汽车 (Intelligent and Connected Vehicle,ICV)是在安全、舒适的前提下,通过先进的传感器等装置,结合现代通信技术实现替代人驾驶的新一代汽车。其技术包括多变环境感知、复杂情况智能决策、车间信息共享协同处理等[1]。高精度定位作为汽车位置获取的关键技术,可以提高车辆实时位置信息的准确度,是智能网联汽车正常工作的重要支撑。导航接收机作为用户端是卫星导航系统中至关重要的一部分,为使用者提供定位、授时等服务,因此导航接收机的性能测试显得尤为重要。本文依据GB 17691中附录Q远程排放管理车载终端的技术要求及通信数据格式中针对定位功能的要求,着眼于车载终端导航接收机,从仿真测试和道路测试两个方向研究了导航接收机的性能测试方法。
1 接收机误差分析
导航接收机定位误差来源有很多,大体可分为3个大类:一是由于卫星自身原因产生的误差,包括卫星钟差、星历误差等;二是在信号传播时,由于环境等因素影响产生的误差,包括相对论效应误差、多路径效应误差、电离层延迟等;三是接收机本身产生的误差,包括接收机钟差、观测噪声误差、天线相位中心误差[2]等。
在实际应用中,可以采取差分技术或二项式模拟卫星钟误差来削弱卫星钟差[3],通过导航电文中的电离层改正模型减少电离层折射误差[4],利用天线方向图的空间特性来降低多路径效应误差[5]等。在本试验中,为了减少误差带来的不确定性,通过仿真试验输出模拟卫星信号,减少卫星本身产生的误差和传播误差,获得接收机在理论环境下的性能;在实车道路测试中,通过利用工装精确计算天线距离、功分器等方式尽量减少误差对实验数据带来的影响。
2 接收机性能仿真测试
2.1 实验原理
仿真测试是在实验室中通过全球导航卫星系统 (Global Navigation Satellite System,GNSS)卫星模拟器模拟产生静态/动态GNSS卫星仿真信号、动态路径场景仿真信号等信号,直接将信号输出至测试接收机的测试过程。仿真测试可避免传播误差、噪声误差等误差影响。笔记本通过串口与测试机连接,可直接读取接收机定位数据,与GNSS卫星模拟器发出的数据对比,直观地测试出接收机在理想环境下的性能。仿真测试设备连接如图1所示。
目前设计的仿真测试项目有NMEA-0183消息输出测试、冷启动首次定位时间测试、重捕获时间测试、捕获灵敏度测试、跟踪灵敏度测试、静态定位精度测试、动态定位精度 (空旷区域)、动态定位精度 (阴影区域)和干扰测试。实验前,通过对导航接收机的性能指标进行研究,提出满足实际使用情况的合理指标作为实验对照,以此判定接收机性能。
2.2 NMEA-0183消息输出仿真测试
2.2.1 NMEA-0183标准
NMEA是美国国家标准协会 (American National Standards Institute,ANSI)的成员之一,也是ANSI授权的标准制定者之一。目前NMEA制定了3项海洋数据接口标准,其中NMEA-0183接口标准定义了设备电信号要求、数据传输协议、时间格式等,在全球各行业领域均得到了应用。2018年11月,NMEA发布了NMEA 0183-V4.11,对GNSS的部分进行更新,除了全球4大导航定位系统外还包括日本准天顶卫星系统 (Quasi-Zenith Satellite System,QZSS)、印度区域导航卫星系统 (Indian Regional Navigation Satellite System,IRNSS)的接口说明。同时,它还允许一些特定的设备制造商对其设备 (如Garmin GPS-38、Trimble Ensign XL)通信自行定义协议,具有较高的灵活性和通用性,因此被广泛地使用[6]。
在接收机上,常见的NMEA-0183消息输出有GGA(GPS定位信息)、GLL(大地坐标信息)、GSV(可见的卫星信息)、GSA (卫星DOP值信息)等。
2.2.2 仿真测试
本项测试的目的是验证接收机能否可以正常输出相应的导航数据,以方便进行后续的性能评估。测试时将被测接收机接入GNSS性能测试平台,设置GNSS卫星导航模拟器位置信息及时间信息。启动GNSS模拟器场景仿真,设置所有卫星输出功率为-130dBm。打开车载导航终端定位开关,等待被测接收机定位成功,保持定位状态2min。设备输出信息如图2所示,表明被测设备消息输出功能正常。
2.3 冷启动首次定位时间测试
当设备完全清空历史信息,即概略时间、概略位置、星历、历书未知,开机需要重新搜索卫星并尝试定位的情况下,从通电后到有效接收到第一个可用的卫星导航定位数据所花费的时间称为冷启动。首次定位时间用于考量导航卫星接收机对卫星信号捕捉的快慢程度,从而体现卫星导航接收机信号搜索过程的效率。
测试时将被测接收机接入GNSS性能测试平台,设置GNSS卫星导航模拟器位置信息及时间信息。清除被测设备所有已知的星历信息、日历信息和位置信息,使设备设置为冷启动测量的状态,关闭被测接收机定位开关。启动GNSS模拟器场景仿真,设置所有卫星输出功率为-130dBm。打开车载导航终端定位开关,开始计时;等待被测接收机定位成功,并且水平定位精度小于100m时,停止计时,记录定位时长;如果定位超时则记录定位失败一次。关闭定位开关,停止卫星场景仿真。重复上述过程获得9组数据见表1。

表1 冷启动首次定位时间测试结果
对测量获得的9组冷启动首次定位时间求取算术平均值:

式中:Ti——第i次测量获得的冷启动首次定位时间;n——测量总数9次。
同时计算冷启动首次定位时间的标准差:

可知冷启动首次定位时间的平均值为40.11s,标准差为3.21s,满足实验前预设冷启动首次定位时间≤60s的要求,且定位成功率为100%。
2.4 重捕获时间测试
重捕获时间指用户设备在接收的导航信号短时消失后(如进入隧道),从信号恢复到重新有效定位所花费的时间。重新捕获时间也同样应用于对卫星导航接收机信号捕获能力的衡量上,但与首次定位时间相比,这项指标突出接收机在信号暂时失锁后的恢复能力。
测试时将被测接收机接入GNSS性能测试平台,设置GNSS卫星导航模拟器位置信息及时间信息。启动GNSS场景仿真,设置所有卫星输出功率为-130dBm,开启被测GNSS终端的定位开关。等待被测设备定位成功,保持定位状态1min。关闭被测设备的定位开关,关闭GNSS卫星导航模拟器的输出信号,时长30s。打开GNSS卫星导航模拟器的输出,打开定位开关,开始计时;当定位成功并且定位水平精度小于100m,停止计时,记录定位时长;如果定位超时,记录定位失败1次。关闭定位开关,停止卫星场景仿真。重复上述过程获得9组数据如表2所示,对测量获得的9组重捕获时间根据公式 (1)和 (2)求取算术平均值、标准差。可知重捕获时间的平均值为3.04s,标准差为0.74s。满足实验前预设重捕获时间≤5s的要求。

表2 重捕获时间测试结果
2.5 静态定位精度测试
本测试目的是验证车载GNSS导航设备在冷启动定位成功后的定位精度。将被测接收机接入GNSS性能测试平台,设置GNSS卫星导航模拟器位置信息及时间信息。清除被测设备所有已知的星历信息、日历信息和位置信息,使设备设置为进行冷启动测量的状态,关闭被测接收机定位开关。启动GNSS模拟器场景仿真,设置所有卫星输出功率为-130dBm。打开车载导航终端定位开关,等待定位成功。保持定位成功状态1min,记录1min内的定位数据,并计算定位数据的平均精度,并与参考位置坐标进行比较。图3为GNSS卫星导航模拟器设置样例,表3展示了被测接收机输出位置坐标与参考位置坐标的比较,二者吻合,满足预设要求。

图3 GNSS卫星导航模拟器设置样例

表3 静态定位精度测试结果
3 接收机动态定位性能道路测试
由于仿真测试是通过卫星信号模拟器模拟产生卫星信号发送给接收机,产生的数据是理想环境下接收机的工作指标,从上文中也不难看出静态定位精度与设置值相比几乎完全相同。为了更好地体现接收机在实际工况下的性能指标,本文设计道路测试方案测量接收机在实车动态环境下的定位精度,为接收机性能评价提供依据。
3.1 实验原理
实车测试采用高精度RTK差分定位接收机作为基准,测试车辆作为载体,将被测终端所用天线和高精度RTK差分定位接收机所用天线安装在运动载体上,两天线的相位中心相距不超过0.2m,测试车辆按照规划路线行驶,不少于15min,测试过程中被测终端/持卫星信号锁定,期间包括加速、减速、转弯、掉头等操作,最高车速不超过80km/h。期间使用高精度RTK差分定位接收机获取运动载体在运动过程中各时刻的标准点坐标,并以1Hz更新率采集被测终端输出的位置坐标。结束后,与高精度RTK差分定位接收机提供的标准点坐标相比较,求误差均值,得到被测终端的定位误差,验证是否满足规定指标。路测原理如图4所示。
3.2 实验要求
道路测试要求在测试道路上布置RTK差分基站,供RTK差分定位接收机使用。RTK差分基站放置点经过测绘局测绘得到准确位置信息。在差分基站覆盖范围内,包含开阔场地及楼房遮挡场地,测试车辆可做加减速、拐弯等行驶模式。
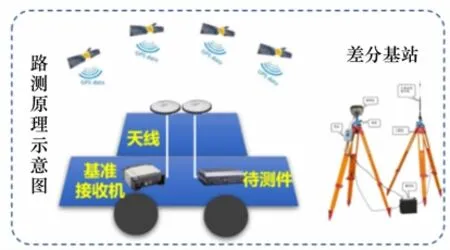
图4 路测原理
同时要求准备有足够空间及供电接口 (或蓄电池)给基准接收机、待测件等设备供电的测试车辆。测试车辆车顶能够安装卫星天线及与差分基站之间通信的通信天线。
RTK差分定位接收机见图5,RTK差分定位天线见图6。

图5 RTK差分定位接收机
实验环境上,要求实验在水平精度因子 (HorizontalDilution OfPrecision,HDOP)≤3或位置精度因子 (Positioning Dilution Of Precision, PDOP)≤4的条件下测试,以确保实验结果的普适性。

图6 RTK差分定位天线
3.3 测试数据分析
道路测试结束后,可分别获取到RTK差分定位接收机和被测接收机的时间、经度、纬度数据,并在时间上对准。已知两点经纬度可利用公式计算两点间距离,本次实验采用功分器输出两路同一天线产生的卫星信号,可认为天线相位中心间距为0。
以RTK差分定位接收机提供的经纬度信息为真值,分析实验数据。依据公式 (3)通过两点经纬度计算距离:

式中:a——基准值和测试值的纬度弧度制差值;b——基准值和测试值的经度弧度制差值;α——测试值的纬度弧度制;β——测试值的纬度弧度制;6378.137——地球半径,km。
在经度弧度制上,被测接收机与RTK差分定位接收机对比结果:误差数据主要在1.50E-07内起伏,个别数据误差达到2.50E-07。在纬度弧度制上,被测接收机与RTK差分定位接收机对比结果:误差数据主要在2.00E-07内起伏,个别数据误差达到4.00E-07。在换算后的距离上,被测接收机与RTK差分定位接收机对比结果:误差数据主要在1.5m内起伏,个别数据误差达到2m,最终平均误差为1.46m,满足预设定位精度。对比结果如图7~图9所示。

图7 测试值与基准值经度差对比图

图8 测试值与基准值纬度差对比图
4 总结与展望
本文首先说明了导航接收机性能测试的重要性,之后针对性能测试方法进行了研究,提出了仿真测试和道路测试具体的测试项目及方法,并列举了部分实验数据进行分析比较。尤其在道路测试中通过测试数据与基准数据的比较,定量地分析了车载导航终端实际运行中的误差情况。同时,实验中还有很多问题需要进行更深的研究。如:通过功分器输出的两路卫星信号与两个接收机各自使用原天线相比是否会产生较大的误差。针对这个问题考虑使用工装确定两天线相位中心距离,精确计算误差。随着“中国制造2025”等发展战略的提出,可以预见智能网联汽车产业将会蓬勃发展,相关性能测试工作将会为产业的健康发展提供坚实的基础。
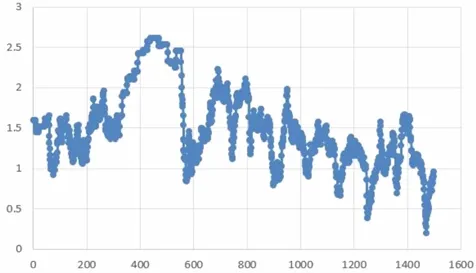
图9 测试值与基准值距离差对比图
