关节臂坐标机示值校准不确定度分析
2019-11-27石韡蒋加平徐光洁
石韡 蒋加平 徐光洁
摘 要:JJF 1408—2013《关节臂式坐标测量机校准规范》仅给出了用标准球杆校准关节臂坐标机空间长度示值误差的方法。该文将提出用3等量块校准关节臂坐标机空间长度示值误差的方法,并分析其不确定度,确定该方法的有效性。确定此方法在校准实验室应用的科学性和可行性。对于测量范围较小的关节臂测量机的空间尺寸的校准,使用量块进行校准尤为经济可行。
关键词:关节臂;量块;校准;方法;不确定度
中图分类号:TB921 文献标志码:A
关节臂式坐标测量机也称便携式三维测量臂、曲臂式坐标测量机。由于其便携性,广泛应用于汽车零配件、模具、钣金件、塑料制品、汽车整车等现场测量和检测。作为测量器具,其示值校准显得尤为重要。JJF 1408—2013颁布之前,部分校准机构就参照JJF 1064—2010《坐标测量机校准规范》用量块对关节臂测量机的空间尺寸示值进行校准。JJF 1408—2013颁布之后,采用标准球杆对其空间尺寸示值进行校准的方法受到各校準机构的普遍重视。但是由于标准球杆的制造工艺不成熟,国产厂家少,购置费用较高,很难得到普遍采用和推广。
1 测量任务及目标不确定度
1.1 测量任务
用900 mm三等量块校准测量臂空间测量直径1.2 mm,空间长度最大允许误差±0.025 mm的关节臂坐标机的空间长度示值误差,并给出扩展不确定度。
1.2 测量任务目标不确定度U
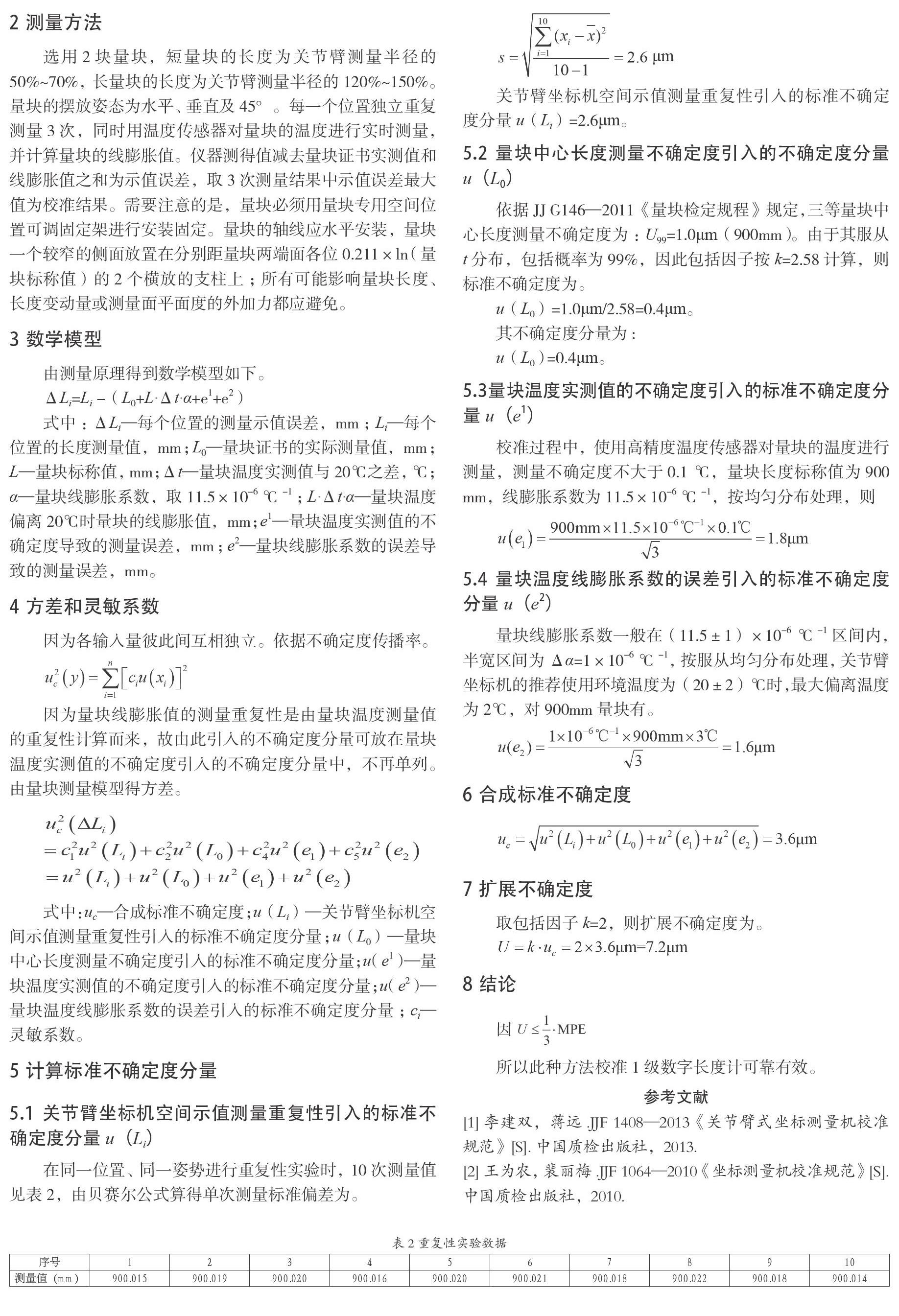
2 测量方法
选用2块量块,短量块的长度为关节臂测量半径的50%~70%,长量块的长度为关节臂测量半径的120%~150%。量块的摆放姿态为水平、垂直及45°。每一个位置独立重复测量3次,同时用温度传感器对量块的温度进行实时测量,并计算量块的线膨胀值。仪器测得值减去量块证书实测值和线膨胀值之和为示值误差,取3次测量结果中示值误差最大值为校准结果。需要注意的是,量块必须用量块专用空间位置可调固定架进行安装固定。量块的轴线应水平安装,量块一个较窄的侧面放置在分别距量块两端面各位0.211×ln(量块标称值)的2个横放的支柱上;所有可能影响量块长度、长度变动量或测量面平面度的外加力都应避免。
3 数学模型
由测量原理得到数学模型如下。
5.3量块温度实测值的不确定度引入的标准不确定度分量u(e1)
校准过程中,使用高精度温度传感器对量块的温度进行测量,测量不确定度不大于0.1 ℃,量块长度标称值为900 mm,线膨胀系数为11.5×10-6 ℃-1,按均匀分布处理,则
5.4 量块温度线膨胀系数的误差引入的标准不确定度分量u(e2)
量块线膨胀系数一般在(11.5±1)×10-6 ℃-1区间内,半宽区间为Δα=1×10-6 ℃-1,按服从均匀分布处理,关节臂坐标机的推荐使用环境温度为(20±2)℃时,最大偏离温度为2℃,对900mm量块有。
6 合成标准不确定度
7 扩展不确定度
取包括因子k=2,则扩展不确定度为。
8 结论
所以此种方法校准1级数字长度计可靠有效。
参考文献
[1]李建双,蒋远.JJF 1408—2013《关节臂式坐标测量机校准规范》[S].中国质检出版社,2013.
[2]王为农,裴丽梅.JJF 1064—2010《坐标测量机校准规范》[S].中国质检出版社,2010.
