事件驱动的高新能源占比送端电网多直流协同频率控制
2019-11-23游广增钱迎春李玲芳
游广增,钱迎春,李玲芳
(云南电网有限责任公司电网规划建设研究中心,昆明 650011)
0 前言
电网频率是电力系统运行的重要控制参数。如果系统频率发生严重偏移,会影响用户设备及发电设备本身的安全和效率。随着新能源的发展,电网中接入的风力和光伏机组的规模逐渐增大,而风力和光伏发电机在正常运行时对系统频率的要求格外严格。一旦电力系统的频率超过允许的范围,系统中的风力和光伏发电机需要被切除;所以对于接有大规模风力和光伏发电机的送端电网,将其频率控制在一定范围内,避免风机或光伏切除具有重要意义[1]。
针对电网有功不平衡导致的频率偏移问题,常用的控制措施主要是从电源和负荷两侧进行控制,包括一次调频[2]、二次调频[3]、低频减载[4]和高频切机[5]。而随着电力电子技术的进步,大容量高电压直流输电快速发展。由于电力电子装置具有快速调节能力,高压直流输电的功率传输可以在短时间内快速调整,因此,利用直流参与系统频率控制得到了越来越广泛的应用。文献[6-9]提出了使用附加频率控制器解决某种故障导致的单回直流系统的频率偏移问题;在此基础上,文献[10-11]将研究对象从单回直流系统进一步扩展为多回直流系统,通过基于响应的多直流协调方法,解决某种故障导致的多回直流系统的频率偏移问题,研究表明该方法具有良好的通用性,可以解决多种不同故障导致的系统频率偏移问题,但具有响应不够迅速的缺点;文献[12-13]通过基于事件的多直流协调方式,分别解决了故障下系统频率偏移峰值过大和电网的频率失稳的问题,研究表明基于事件的多直流协调方式相较于基于响应的多直流协调方式,可以更快地促使系统功率平衡,提高系统的频率稳定性,不存在时延问题。
本文对基于响应和基于事件的多直流协调方式进行了分析比较,通过计算系统最大频率相对于各直流功率灵敏度来制定合理的直流功率紧急支援方案,解决直流闭锁下送端电网频率偏移,从而导致网内风电和光伏机组脱网的问题,并以某含大规模新能源的多直流送端电网为例,对本文的方法进行了验证,证明了本文方法的有效性。
1 问题分析
电网频率是由发电机转速决定的,发电机转速越快,则电网频率越高;发电机转速越慢,则电网频率越低。而发电机转动角速度与原动机机械功率和电磁功率的关系如下式所示。

其中Pm为原动机机械功率,Pe为电磁功率,Tj为发电机转动惯性,ω为发电机转动角速度。一旦电网中发生某种故障,导致电磁功率Pe迅速减小,就会导致发电机角速度ω迅速增加,发电机转速迅速增加,从而导致电网频率升高,严重情况下会导致电网频率超过允许的范围。对系统的频率进行控制,即对Pm和Pe进行控制,使二者平衡。
采用一次调频、二次调频和高频切机对系统频率进行控制,本质是针对发电机侧,对Pm进行控制;采用低频减载对系统频率进行控制,主要是在负荷侧,对Pe进行控制。
送端电网本地负荷无法消纳的过量有功功率通过多直流通道送往受端电网,对送端电网来说相当于增加了负荷,对受端电网来说相当于减小了负荷,故多直流协调方式控制系统频率,相当于在负荷侧控制Pe,从而对系统的频率进行控制。通过基于响应的和基于事件的多直流协调方式解决电网频率越限问题,即分别通过安装附加频率控制器和制定具体直流功率紧急支援措施的方式,来调节直流输送的有功功率调节Pe,使Pm与Pe维持平衡,避免频率的持续上升或者下降,超过所允许的范围。相较于基于响应的多直流协调方式,基于事件的多直流协调方式可以更快地促使系统功率平衡,提高系统的频率稳定性,不存在时延问题。本文针对基于事件的多直流协同频率控制问题开展研究,提出针对具体大规模功率扰动的多直流协同频率控制策略。
2 送端多直流协同控制模型与求解
2.1 多直流协同频率控制数学模型
在高压直流闭锁导致系统频率偏移的情况下,由于直流一般运行在额定运行状态,因此增加健全直流的有功输送量意味着健全直流将处于过载运行方式,增加健全直流的故障风险。因此,在多直流协同频率控制中,本文考虑在保证系统最大频率不超过允许范围的前提下,以最小化各非故障直流功率增加量为目标,构建多直流协同频率控制模型如下:

其中,ΔPΣ为送端电网被控直流累计功率增加量,n为被控直流数,ΔPord,i为第i条被控直流的功率增加量,fmax为电网暂态最大频率,fth为系统允许的最大频率上限,Pord,i为第i条直流的功率,Pmaxord,i为第i条直流的功率上限。
根据电网调度规程,当电网频率高于51 Hz时,风电场或光伏电站需要根据电网调度部门的指令进行调度[14],甚至切除。结合上述调度规程,本文取fth为51 Hz。
对存在多条健全直流可供选择的多直流馈出电网,本文根据健全直流的送受端是否与故障直流的送受端一致进行选择,即被控直流应是落点与故障直流落点位于同一受端电网的非故障直流线路。
为保证高压直流安全运行,直流过载倍数根据过载时间的不同而有所差异。根据直流设计的不同,直流短时间内可以过载20%~30%的功率[15]。本文按直流过载25%确定直流功率过载上限。
2.2 多直流协同控制求解方法
由式(1)可知,在高频场景下,被控健全直流的功率控制量越大,则系统最大频率偏移量越小。因此,为最小化(2)的目标函数,可以求解系统在满足最大频率偏移恰为fth时的临界直流控制量,且fmax是各受控直流控制量的函数,即:
在某扰动下,假定第k次迭代中各受控直流的功率分别为Pord,i,最大频率偏移为fmax,对(4)求导可得fmax对受控直流i的功率的灵敏度为:

由于直流增加外送功率时电网频率下降,因此hki为负数。为减少直流控制量,可以优先调节灵敏度绝对值高的直流功率。因此,选择灵敏度绝对值最大的直流为当前控制直流j,即其灵敏度满足:

则第j条直流的功率改变量为:

因此,直流j的功率指令变为:

实际求解过程中,由于函数(4)为非线性函数,且无法显式表达,准确的灵敏度求解非常困难。为解决此问题,本文采用摄动法近似计算(5)。
2.3 多直流协同控制求解流程
根据2.2 节的讨论,上述多直流协同控制问题可以使用图1 和图2 所示的流程图进行求解(下称方法1),其中图1 为主流程图,图2 为图1 中“选择被控直流并计算控制量”环节的具体实现,e 为算法收敛判据门槛值,本文取0.01 Hz。
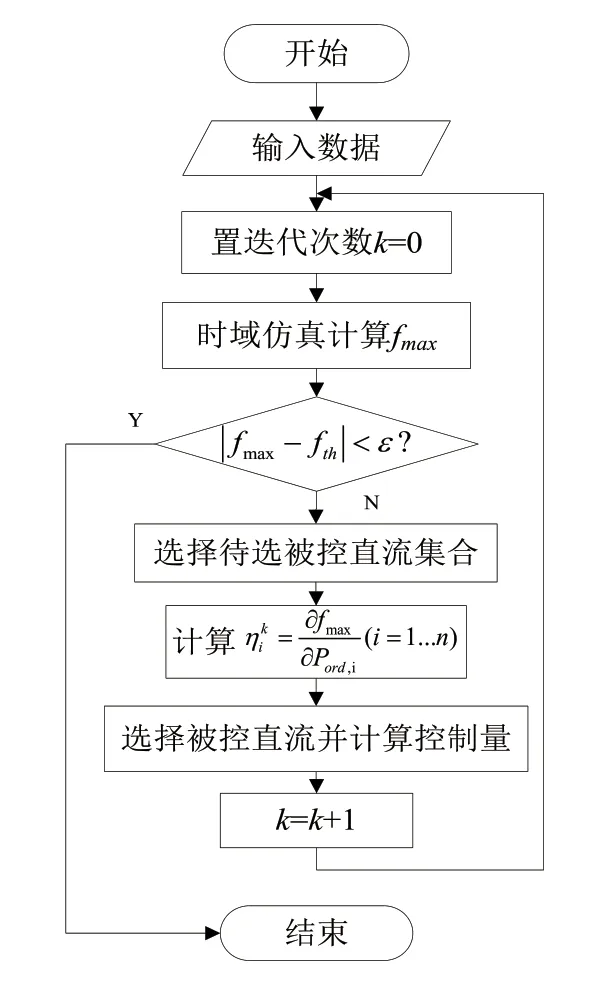
图1 直流协同频率控制算法流程图
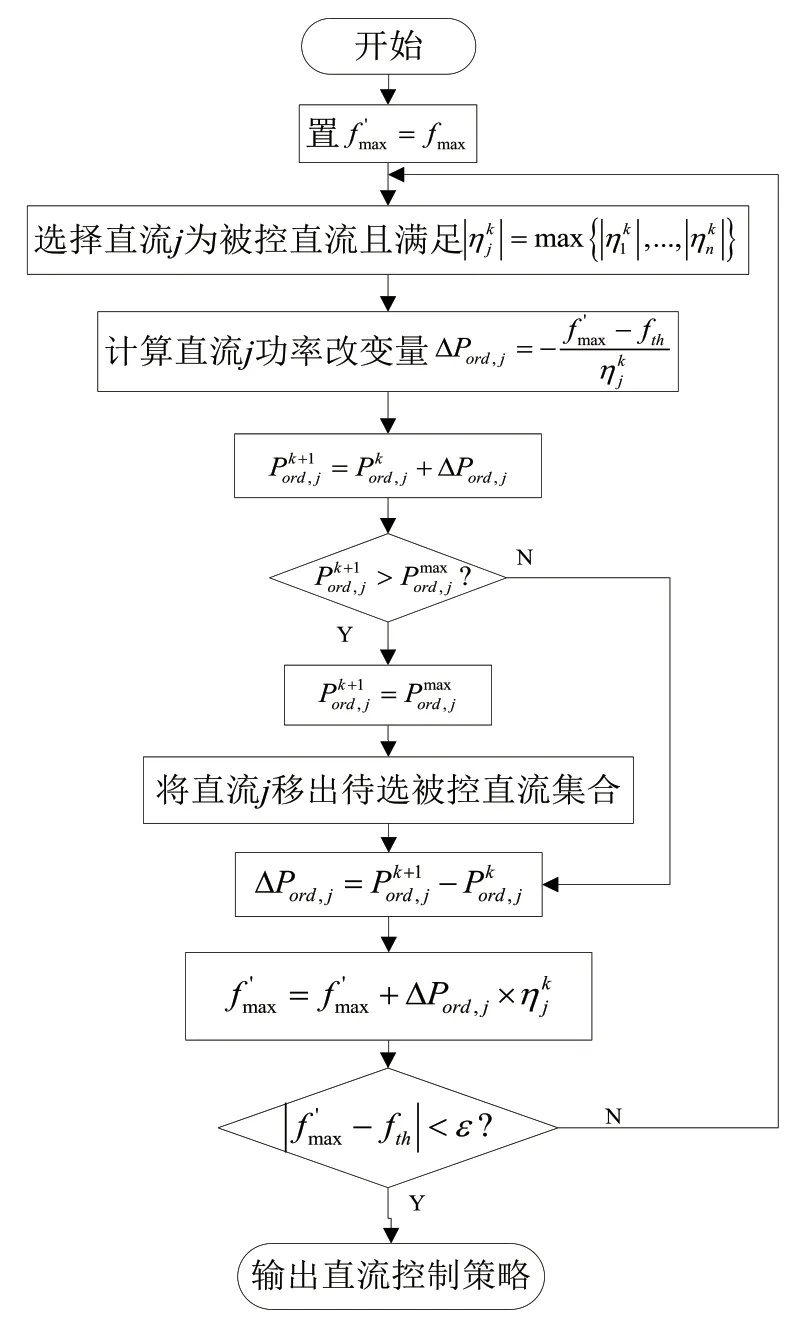
图2 被控直流选择与控制量求取流程图(方法1)
2.4 定步长模型求解方法
由于系统存在非线性,方法1 在每次迭代中都要力图将频率控制至51 Hz,对于灵敏度较高的直流,其功率控制量往往会达到其功率过载上限,直流控制量的搜索不够精确。为了进一步减小需要增加的总有功,需要对方案进行进一步优化。
本节限定被控直流在每次迭代中的控制量改变量为Pstep,通过选择较小的Pstep以搜索更精细的直流协同频率控制方案,即按式(7)求得后,应用如下判据:

进行公式(9)的判断后,对直流功率改变量的值进行更新:

以下将该方法称为方法2,其求解逻辑与方法1 类似,但“选择被控直流并计算控制量”环节采用图3 所示流程。
相较于方法1,方法2 可以得到更加优化的直流功率紧急支援方案,但是迭代次数增加,从而导致所需要的计算时间增加。
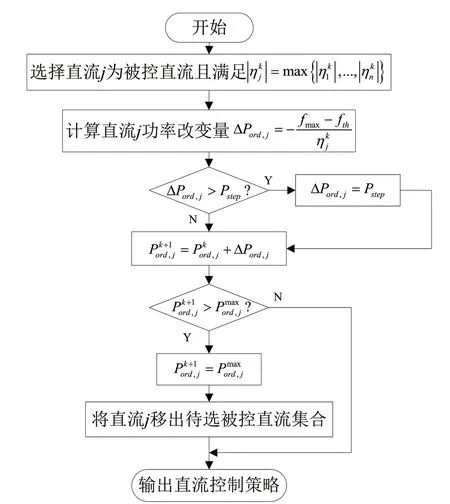
图3 被控直流选择与控制量求取流程图(方法2)
3 算例分析
3.1 算例电网介绍
本文以图4 所示互联电网中的电网1 为例,分析本文所提方法的有效性。电网1 可再生能源丰富,总有功发电约56 GW,其中风电和光伏机组总有功发电约12 MW,占全部发电超过20%。电网1 是典型的送端电网,其网内负荷水平约为26 GW,富余功率约30 GW 通过7 条高压直流输电工程外送至其他电网,外送功率约占电网1 全部发电的54%。
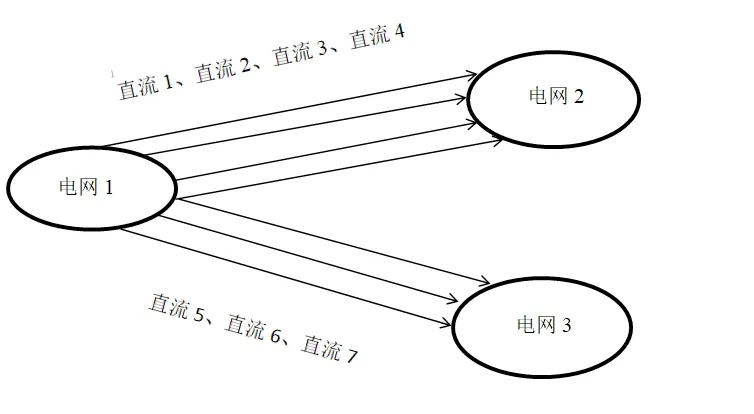
图4 算例电网结构
某丰大运行方式下,算例电网各直流的输送功率如表1 所示。
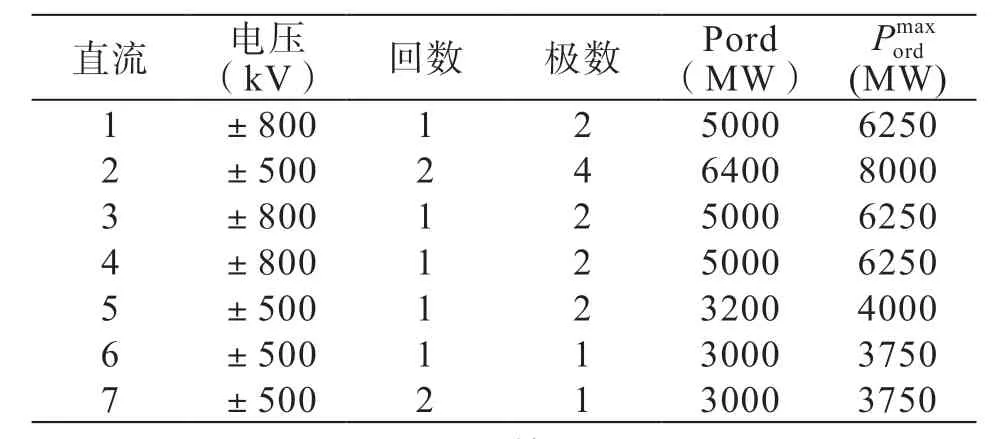
表1 算例电网直流统计
3.2 直流协同频率控制算例分析
以直流4 发生双极闭锁故障为例,送端电网损失外送功率5000 MW。此时电网1 最大频率为51.7915 Hz,大于51 Hz 上限,电网1 内部的风电和光伏机组可能发生脱网。考虑发生双极闭锁的直流4 与直流1、2 和3 的落点位于同一受端电网,所以针对直流4 双极闭锁引起的系统频率越限问题,可选择直流1、2 和3 为受控直流,各直流功率上限见表1。
利用本文所提方法1 求解算例电网频率越限问题,在第一步迭代中,通过摄动法求得直流1、2 和3 的灵敏度分别为-0.57 mHz/MW,-0.575 mHz/M 和-0.59 mHz/MW,直流3 具有最大的控制灵敏度,选为被控直流。按式(7)计算可得直流3 应增加功率1342 MW,此时直流3 的总功率变为6342 MW,高于其过载上限6250 MW。因此,直流3 的实际功率指令应设定为其上限6250 MW,并将直流3 移出待选被控直流集合。
在直流3 增加功率后,f'max=51.06 Hz。此时,在可控直流中,进一步选择灵敏度最大的直流2 为被控直流,计算得到还需增加94 MW有功输送增加量。因此,直流2 功率指令变为6494 MW,未超其上限。
执行上述控制策略后,fmax为51.4578 Hz,依然大于51 Hz 上限,说明被控直流的有功输送量需要进一步优化。
在第二步迭代中,由于直流3 在迭代一中功率达到上限并被移出被控直流集合,因此,第二步迭代中选择直流1 和2 为被控直流。通过摄动法得到直流1 和直流2 灵敏度分别为-0.265 mHz/MW 和-0.275 mHz/MW,直流2具有最大的控制灵敏度,因此选取直流2 为被控直流。按式(7)计算可以得到直流2 的功率增加量为1665 MW,直流2 的有功输送量应该增加至8159 MW,高于其过载上限8000 MW。因此,直流2 的实际功率指令应设定为其上限8000 MW,并将直流2 移出被控直流集合。
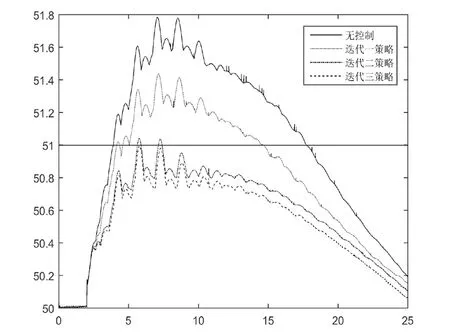
图5 电网1最大频率动态
在直流2 增加功率后,f'
max=51.07 Hz。此时,可控直流集合中只剩直流1,故选择直流1为被控直流,计算得到直流1 的有功输送还需增加158 MW,直流1 的实际有功输送量增加为5158 MW,未超上限。
将迭代二得到的直流控制策略应用于系统,此时系统最大频率fmax为51.04 Hz,依然大于51 Hz,说明被控直流功率需要进一步优化。
此时可控直流仅剩直流1,计算直流1 的灵敏度为-0.15 mHz/MW。根据式(7),直流1 应增加功率267 MW,此时直流1 的总有功输送量为5425 MW,未超上限。
执行相应的直流控制策略,fmax为50.992 Hz,与目标值51 Hz 之差小于e,迭代收敛。电网1 故障后不采取任何措施以及在各步迭代中执行相关直流功率紧急支援策略后,频率变化如图5 所示。
最终,系统应对直流4 闭锁故障的多直流协同频率控制策略为:直流1 增加功率425 MW,直流2 增加功率1600 MW,直流3增加有功1250 MW。此时,系统暂态稳定和电压稳定亦得以维持。
3.3 不同直流协同控制方法对比
为对比不同直流协同控制方法的效果,本文对方法1 和方法2,以及使用等比例增加各健全直流功率的方法(下称方法3)进行了方案对比,各方案的直流功率控制策略如表2 所示,其中方法2 的步长选为100 MW。
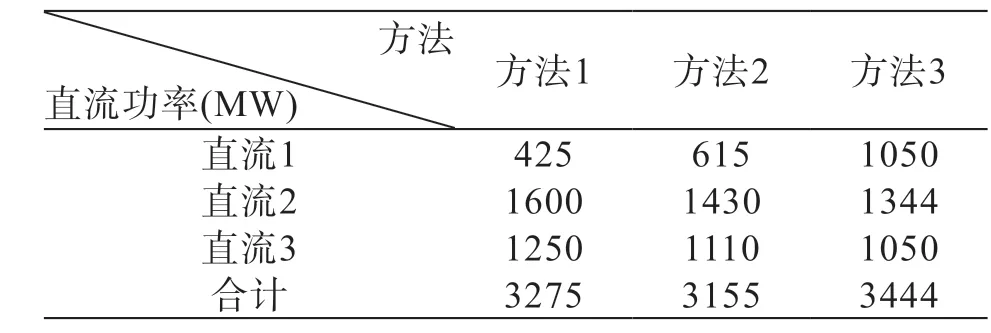
表2 三种方法下的直流控制策略
由表2 可知,方法1 与方法3 相比,在将系统最大频率控制在51 Hz 范围内的前提下,方法1 各直流的总功率增加量减少169 MW,具有更好的经济性。但是方法1 中直流2 与直流3 的过载均达到上限25%,而在方法3 中各直流的过载率均为21%,方法3 下各直流的过载运行安全性高于方法1。
与方法1 相比,方法2 的总直流功率控制量减少120 MW,且各直流均未达到过载上限,直流过载运行安全性优于方法1。但是,由于方法2 限定功率控制量更新步长,优化迭代需要37 次,计算量高于方法1。与方法3 相比,方法2 的总直流功率控制量减少289 MW,且两方法下直流均未达到过载运行上限。
为验证方案的适应性,将算例电网部分区域的负荷减小25%,改变算例电网的运行方式,在直流4 双极闭锁下分别执行之前按照方法1和方法2 制定的直流功率紧急支援方案,系统最大频率满足要求,说明本文提出的方法1 和方法2 都具有良好的适应性。
4 结束语
本文提出了使用摄动灵敏度方法制定直流功率紧急支援措施控制系统频率的方法,避免了电网中的风电和光伏机组因为系统频率越限而脱网,并针对算例电网发生直流双极闭锁故障,导致其频率越限的情况,采用上述方法对电网频率进行控制,使其频率稳定在一定范围内,从而验证了上述方法具有良好的实用性。
本文使用的方法主要针对全网最大频率偏移进行控制,但频率存在时空分布差异,具体新能源发电并网点的频率与全网最大频率存在差别,并网点频率不一定是全网最大频率。如果针对新能源并网点的最大频率偏移,进一步优化直流协同控制策略,可以进一步提高控制方案的可行性。
