基于历史航迹特征的飞行意图识别
2019-11-22何艳王运锋
何艳,王运锋
(四川大学计算机学院,成都610065)
0 引言
大数据时代,人们可以访问到各行各业的信息资源呈现出爆炸式的增长,航空业也不例外。随着航空业的迅速发展,航空公司的规模不断扩大,机队数量的不断增加,飞行目标的航迹数据也越来越庞大复杂。面对庞大复杂的航迹数据,如何有效地利用不同管制意图的历史航迹特征,并对新的航迹意图进行识别已成为航空业领域的新颖之处。
为了避免对历史航迹进行大量标记人工成本高且难度大的缺点,本文采用半监督的思想,对少量历史航迹进行标注并定义其意图。标记完成后,首先,利用均值及曲线拟合的思想对历史航迹数据总结航迹特征。其次,通过基于航迹形状约束的半监督K-means 聚类改进算法对历史航迹进行聚类。并将聚类后的特征集存到数据库。最后,通过数据库中的特征集对新的航迹意图进行识别。
目前,航迹的聚类方法较多,常用的聚类算法有:k均值聚类算法、层次聚类算法、SOM 聚类算法、FCM 聚类算法等,这四种算法在运行时间及准确度方面综合考虑,各有千秋。为了避免传统的k 均值聚类算法的初始点选择不稳定及SOM 时间复杂度较高且大量标记信息成本高的缺点,本文提出了一种基于航迹形状约束的半监督k 均值聚类改进算法,利用少量标注信息指导未标注航迹完成聚类。
本文提出的基于航迹形状约束的半监督K-means聚类改进算法,其中基于航迹形状约束的思想是根据不同飞行目标的航迹形状特点得来的。一般普通客机做直线飞行运动,而特殊侦查战斗机做近似圆周、八字形或者更复杂的飞行运动。利用这一特点,本文通过曲线拟合的思想对航迹进行拟合来确定航迹的形状。
1 确定航迹的形状
航迹是由一系列带有速度、位置信息、航向的点迹构成。航迹可能会因为一些外界因素造成数据丢失或者数据过大过小的情况。为了使这些异常点对整个航迹的误差减小得到一条较稳定的航迹,我们考虑一系列去燥、剔除异常点、滤波等方法对航迹进行预处理。在航迹预处理后,应确定航迹的形状,考虑到复杂的航迹在小范围内可以用曲线拟合来逼近,本文结合最小二乘拟合方法确定航迹的形状。
1.1 航迹的拟合
(1)基本直线拟合
给定N 个二维空间中的点,每个点用(x(i),y(i))来表示,最小二乘法进行直线拟合的基本思想是通过最小化下面的误差函数来求取直线参数:
通过解二元一次方程组或者利用矩阵求逆运算,可以得到直线参数:

为此,我们拟合出了直线方程:y=b+kx
同时可以计算出拟合度Q1:
(2)圆拟合
给定N 个二维空间中的点,每个点用(x(i),y(i))来表示,最小二乘法进行圆拟合的基本思想是通过最小化下面的误差函数来求取圆参数:

求取误差函数对三个圆参数的偏导数,并令其值为0:
同理(1)可得:x0,y0,R,拟合度Q2。
1.2 航迹的形状
具体实现步骤如下:
(1)确定航迹的直线y=kx+b 圆(x-x0)2+(y-y0)2-R2=0 参数。将航迹的点迹分别用最小二乘法直线、圆进行拟合(第1 章1.1 节),并得到直线参数(k,b,Q1),圆参数(x0,y0,R,Q2)。
(2)比较拟合度Q1、Q2 的大小。
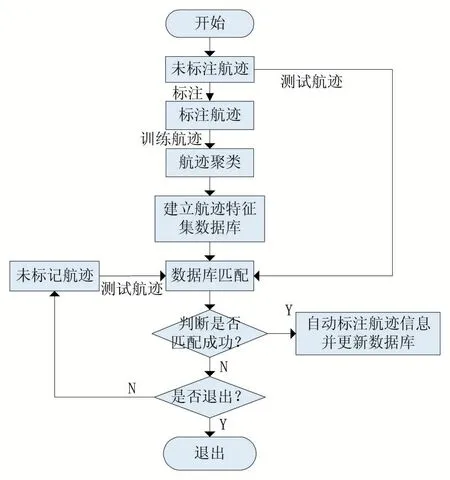
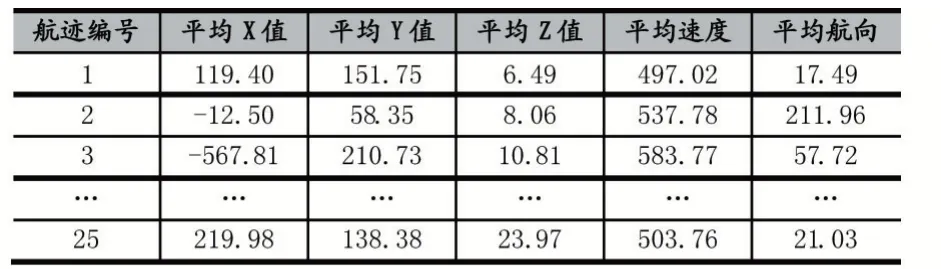
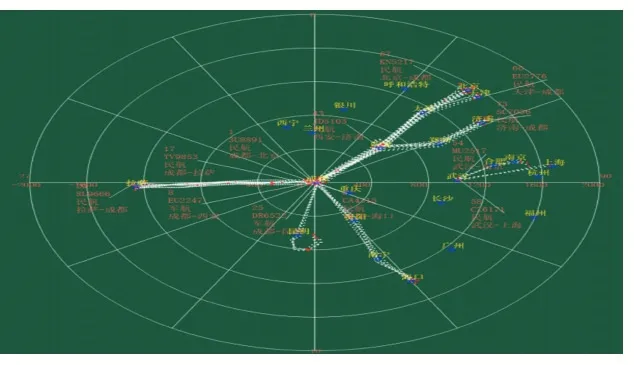
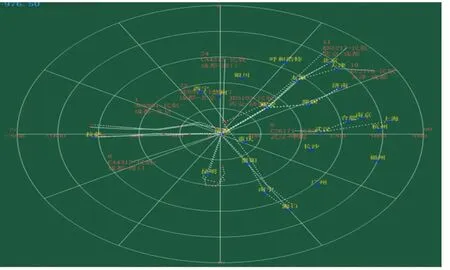
(3)如果Q1 (4)如果Q1>=Q2,不能判断航迹形状。设定一个初始半径R0,如果R 注:如果拟合成直线,则形状标志为0;如果拟合成圆,则形状标志为1。 本文采用半监督的思想对少量历史航迹进行标记并定义其航迹意图,标注信息包括:飞行目标的编号、类型、用途、起始地点等。航迹的标注根据标记信息是否相同可以分为两种:同类航迹一次标注和多次标注。如果有两条及以上的航迹标注信息相同,则要对这些有相同标记信息的航迹进行中心化处理,最终得到一条具有代表性的标记航迹。 历史航迹数据由一系列带有飞行编号、空间位置、运动速度、运动方向的点迹构成。为了更好地挖掘历史航迹的特征信息,本文引入了2.2.1 节的特征参数。 2.2.1 特征集描述 各个特征参数代表的含义如下: ID:航迹编号 Flag:航迹形状标志(1 为圆,0 为直线) ClusterNum:每类航迹的数目 avg_fx,avg_fy:航迹平均起始点位置 GH:航迹平均高度 GV:航迹平均速度 Gpx,Gpy:航迹平均中心点位置 GHS:航迹平均航向 GR:航迹平均半径 Lables:航迹标注信息(包括:飞行目标的编号、类型、用途、起始地点) 注:当航迹不涉及某个特征参数时,该参数置为0。 2.2.2 特征提取 航迹特征分析是飞行目标意图识别的关键之处。特征的选取好坏直接影响航迹意图识别效果。 在一般简单场景中,仅考虑飞行目标的空间位置、速度、航向等特征参数,就能完成简单飞机航迹意图的识别过程。但是在一些复杂场景中,例如一些做近似圆周、八字形或者更复杂的飞行运动的特殊侦查战斗机,如果没有考虑航迹的形状特点,则航迹意图识别对航迹的形状不太敏感,识别效果将会不理想。为了克服这个缺点,本文引入了航迹形状特征参数。 本文利用均值及曲线拟合的思想对历史航迹数据总结航迹特征。首先,利用均值的思想,对每条航迹求得航迹平均速度、平均高度、平均起始点位置等。其次,利用曲线拟合的思想,通过“确定航迹形状”算法(见第1 章第2 小节,得到每条航迹的航迹形状标志参数及直线参数(k,b,Q1),圆参数(x0,y0,R,Q2)。如果形状标志参数为0,则表示该条航迹拟合为直线;反之,为1 时,则表示该条航迹拟合为圆形。最后,将得到的航迹特征参数作为历史航迹聚类分析的输入,目的是将同类型管制意图的航迹聚成一类,以便新航迹管制意图的识别。 本文描述的历史航迹聚类是在航迹形状的约束下,利用少量标记航迹数据,通过空间距离对航迹进行聚类的一个过程。航迹聚类的目的是为了进一步准确的对航迹进行分类与识别。针对航迹序列的长度不固定的特点,本文采用K-means 算法对航迹训练样本进行聚类。 给定欧氏空间中航迹的两点集A={a1,a2,…,an},B={b1,b2,…,bm} ,它们之间的空间相似距离H 定义为:H(A,B)=min[h(A,B),h(B,A)]。 其中: 这里di,j是一条航迹上的第i 个点到另一条航迹上的第j 个点之间的欧氏距离。 假设训练航迹样本为A={a1,a2,…,am},其中每一个元素ai为一条航迹序列。用户根据需求标注n(n 根据标记航迹样本总结航迹特征,具体实现步骤如下: (1)初始化聚类“中心”。用已标记的航迹集合B求得k 个聚类中心,C={c1,c2,…,ck}(k<=n) (2)计算训练航迹样本A、聚类中心样本C 中每条航迹序列的形状、拟合斜率、拟合半径等参数。(见第2章2.2.2 节) (3)确定A 中每条航迹ai所属的类。计算ai到C={c1,c2....ck}的空间距离,如果形状相同且斜率、拟合半径均在初始约束范围内,则该航迹被分到与它距离最近的“聚类中心”所在的类。 (4)调整聚类“中心”。由步骤(3)可得到k 类聚类结果,对每一类,找出属于该类的所有样本,寻找一个新的聚类“中心”,使其到该类内所有样本的距离之和最小。 Xj,i表示属于第i 类的第j 个样本,ni表示第i类中航迹的个数。 重复步骤(3)和(4),直到连续两次的迭代结果(即聚类中心)不再发生变化。此时k 类聚类样本就是最终聚类结果,各个类中的航迹属于同一类航迹模式。 总结各类聚类样本特征。对每类样本分别计算特征集参数(见第2 章2.2.1 小节),并存到数据库。 航迹意图识别就是在完成建立各个历史标记航迹类的特征集数据库后,将新的未标记航迹测试样本代入数据库中进行意图识别的一个过程。 主要步骤如下: 启动数据库。 设定参数初始阈值,加载测试样本航迹,并确定航迹的形状。 (1)航迹意图识别。通过航迹的形状标志,识别数据库中相同形状标志的航迹参数信息。如果参数值在阈值范围内,则识别成功,否则识别失败。 (2)自动标注信息。如果测试样本中航迹识别成功,则自动标注该航迹信息。 (3)更新数据库。将测试样本中识别到的航迹和数据库中相应航迹重新计算特征集参数值,并更新数据库。 为了验证本文提出基于航迹形状约束的半监督K-means 聚类改进算法的有效性,本文用实验4.1 对训练样本的航迹进行仿真实验。实验4.1 分别用文献[1]和本文使用的聚类算法做对比实验;试验系统建立在1Gbyte内存的普通PC 上,仿真软件采用VS2010、Qt 工具。飞行目标航迹的聚类与识别系统流程图如图1 所示。 图1 流程图 分别采用文献[1]方法和本文方法对航迹进行聚类,选取500 条未标记航迹训练样本数据进行聚类仿真实验,对其均值化如表1 所示。 表1 航迹训练样本数据 对部分航迹标记如图2 所示,其中橙色字体表示航迹标记信息(航迹号、飞机型号、飞机用途、飞机始末地点),白色点表示航迹。 注:该实验中选取的航迹均无拐点(斜率变化超过初始阈值)。 文献[1]和本文聚类方法通过训练样本航迹生成数据库特征集后,然后测试样本再根据特征集用识别算法(见第4 章)对两种方法的识别正确率进行比较。 图2 航迹标注静态展示图 根据上述标注航迹信息,通过文献1 和本文聚类方法将航迹训练样本进行聚类,得到部分数据库中特征集如表2 所示。 表2 本文特征集 本实验共选取了50 条测试样本进行了仿真实验,抽取了25 条较为典型的航迹进行分析。 测试样本如表3 所示。 表3 测试样本数据 将测试样本航迹分别用两种方法匹配如下:文献[1]的展示图如图3。 图3 文献[1]航迹识别静态展示图 本文的展示图如图4。 图4 本文航迹识别静态展示图 上述图3、4 选取部分测试航迹样本的识别情况作为展示。图3 可以看出航迹编号为2、10、11、24 的航迹被正确识别;图4 可以看出编号为1、6、7、9、10、11、23、24 的航迹被正确识别。 识别结果如表4 所示。 表4 识别率结果 从上面的实验结论可以得到,本文采用的聚类方法的识别率比文献[1]高。文献[1]中的聚类方法在传统方法上虽有了好的改进,即:在用距离进行聚类时,综合考虑了目标的速度、航向的欧氏距离。但是,该聚类算法没有考虑航迹的形状特点,以至使测试样本在进行意图识别时,对航迹的形状不太敏感。为了克服这个缺点,本文在此在聚类中引入了航迹形状标志及形状参数(直线的斜率、圆的中心点及半径)等,大大提高了测试航迹样本意图识别的精准率。 本文针对在海量航迹数据中,如何有效地总结出普通客机飞行航迹和特殊侦查飞行航迹的特征这一问题,提出了基于航迹形状约束的半监督K-means 聚类改进算法,并通过对比实验利用不同训练、测试航迹样本对该改进算法的高效性进行了验证,实验结果表明该算法是相对精准高效的。2 历史航迹的处理
2.1 航迹标注
2.2 航迹特征
3 历史航迹的聚类分析
3.1 航迹的空间距离
3.2 基于航迹形状约束的半监督K-means聚类改进算法
4 静态航迹意图的识别
5 仿真实验





6 结语
