吸附式自动擦黑板机器人的设计与应用
2019-11-14申鹏王麒宣褚昊霖何敬聪毛旭东
申鹏 王麒宣 褚昊霖 何敬聪 毛旭东


摘 要: 为了更加环保、高效地清扫黑板上的字迹,保障老师和学生的身体健康,设计一种吸附式自动擦黑板机器人,该机器以STM32为核心,多种传感器协同工作,使得机器具有清扫、吸附、移动等功能,可以自动或手动清扫黑板上的字迹,清扫完成后返回固定起始位置。实际运行结果表明,该机器可以正常运行,并且高效地完成对黑板字迹的清扫,同时收集粉尘。
关键词:机器人;STM32;传感器;吸附
中图分类号: TP249 文献标识码: A DOI:10.3969/j.issn.1003-6970.2019.09.028
本文著錄格式:申鹏,王麒宣,褚昊霖,等. 吸附式自动擦黑板机器人的设计与应用[J]. 软件,2019,40(9):120-123
Design and Application of Adsorptive Automatic Blackboard Cleaning Robot
SHEN Peng1, WANG Qi-xuan2, CHU Hao-lin1 , HE Jing-cong1 , MAO Xu-dong2
(1. Harbin University Of Commerce of Computer and Information Engineering, Harbin, HeiLongJiang, 150000, China)
【Abstract】: Nowadays black boards are widely used in almost every educational institute. They are large in size, for that reason it is very time consuming process to erase the writings from the board with duster. Using duster also reduce the visual quality of the board. Considering this “adsorptive automatic blackboard cleaning robot”, an automatic system can solve these problems. Our system consists of a set of sensors and STM32, as the core, in order to achieve this mechanism. The robot has horizontal movements and it cleans the blackboards while absorbing the dust. It is possible to control the robot by a remote control system or by a hand. The actual experience results show that the robot can work efficiently on cleaning the blackboard handwriting, and collecting dust.
【Key words】: Robot; STM32; Sensors; Adsorptive
0 引言
当今教学,虽然多媒体技术广泛使用,但是教师使用粉笔板书依然是主流。传统的黑板擦,体积小巧,成本低,但其结构简单,功能单一。在擦拭黑板的过程中,费时费力,而且容易产生大量粉尘,被师生吸入体内,会对身体健康造成危害,这无疑是广大师生日常面对的健康杀手[1]。为了解决上述问题,本文基于STM32设计一种吸附式自动擦黑板机器人,可将其吸附在黑板上,机器人会按设定的路线移动清扫黑板上的字迹,并将粉尘吸进储尘盒中,比传统擦拭方法更加有效,擦拭效率和效果显著提高,从而提高课堂效率和保证师生健康[2]。
1 总设计思路
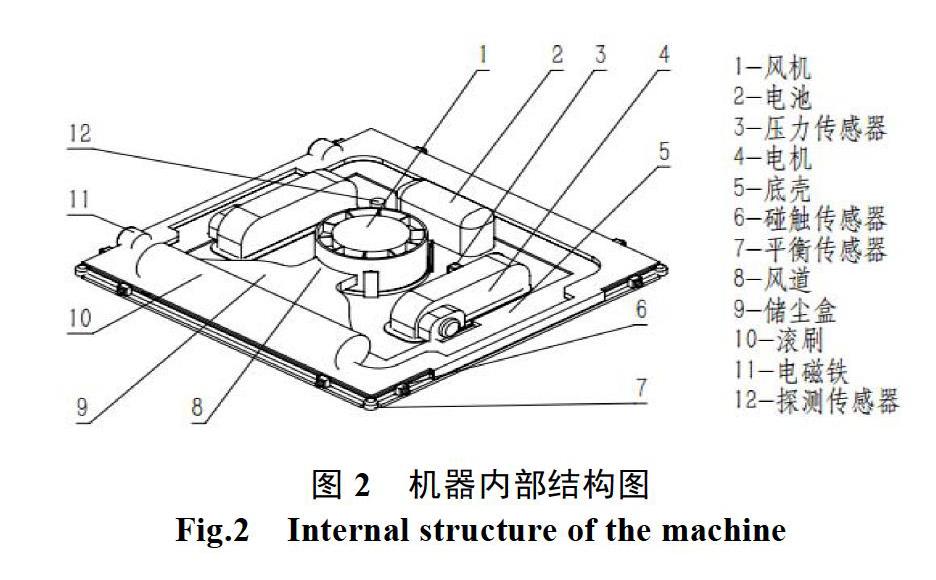
总体设计框图如图1所示,采用STM32作为主控芯片,由电机驱动、探测传感器等八个模块组成。使用者首先要将黑板的尺寸通过遥控器告知给机器,机器会根据输入尺寸计算要行走行数和行移动距离,然后按‘S型轨迹移动[3]。如图2所示,机器内部的滚刷会将沿途的字迹清扫下来,风机将粉尘吸入储尘盒。使用者可以通过红外遥控器手动控制机器去指定位置清扫。黑板右上角会安装铁质挡板
以及充电器,机器清扫完毕后会返回起始位置,通过电磁铁模块磁力吸附在铁质挡板,以达到停机固定的效果[4]。
2 系统硬件电路设计
2.1探测传感器模块的设计
探测传感器由一对红外线发射与接收管组成,发射管对黑板表面发射红外线,接收管负责接收,当发射出的红外线没有被反射回来或反射回来强度不够大时,探测模块输出端对应输出不同的电压值,由此判断黑板上是否有字迹。
2.2角度传感器模块的设计
角度传感器模块由LM393双电压比较器和N1000060单轴角度传感器组成,该模块测量的角度范围为0°到180°,对应正比输出0.5 V到4.5 V电压值,可通过模数转换器进行采集,由此判断机体当前是否水平移动。当机器需要转弯时,控制两个行走电机正反转,采集机体当前的角度,使机体准确的进行‘U型转弯。两个电位器可以调节测量角度范围,调整精度为±1°。
2.3气压传感器模块的设计
气压传感器模块由惠斯通电桥传感器和调理芯片构成,模块内含差分放大、自动校准、温度补偿等电路,可直接测量-5 kPa到0的压强,对应正比输出0.5 V到4.5 V电压值,可通过模数转换器进行采集,只有当机器内部负压到达完全吸附的阈值时,机器方可脱离固定的电磁铁。
2.4碰撞传感器模块的设计
机器四周装有八个碰撞传感器。当机器到达黑板边缘时,机器外壳上的碰撞传感器会被按压,并发出信号给总控制芯片,总控制芯片这时会控制机器后退进行U型转弯动作。
2.5电机驱动模块设计
电机驱动模块由A4950驱动芯片、稳压器和光电隔离器构成,可控制电机正反转,使得机器完成转弯动作,此模块自带限流保护功能,过流时不会断电,但会限制最大输出电流。主控芯片IO口与IN1,IN2连接,可通过设置PWM占空比,改变了电机输出扭矩的大小,由此来调节行走电机的速度。
3 软件设计
在Keil环境下,使用C语言编写控制程序,程序流程图如图6所示。擦黑板机器人自我保护的
优先级最高,自我保护步骤为:当机器清扫到黑板边缘处产生碰撞时,总控芯片会控制电机,使其到达安全区域继续清扫,同时气压传感器采集机器吸附状态,对应地调节风机转速。探测传感器,碰撞传感器连接在STM32的中断引脚上,碰撞传感器的中断优先级最高。角度和电压传感器则接在STM32内置的模数转换器管脚,调用1 ms定时器中断服务,对模拟量进行采集。电机和风机调速则通过调用定时器改变PWM占空比来实现[5]。
软件系统首先对各模块进行初始化。包括ADC、PWM和I/O口的设置等。初始化完成后,读取人机交互模块的参数,包括开关状态及红外遥控传回的数据。然后开始进入无限循环,读取各传感器模块传输的数据,控制电机和风机工作[6]。
4 分析与测试
机器人静止贴附在黑板表面时,主要受到负压吸附力、重力和静摩擦力作用,其中静摩擦力来自履带和清洁装置对玻璃表面的相互作用。假设忽略受压后履带和海绵的回弹,机器人驱动结构的履带轮与黑板表面刚性接触,清洁装置压缩后使之与机器人底盘成为刚性连接,即黑板对清洁装置的支持力会通过清洁装置传递到机器人本体,机器人在静止状态下的受力如图7所示。
其中固定坐标系为{![]() }、机器坐标系为{
}、机器坐标系为{![]() },
},![]() 、
、![]() 、
、![]() 。
。![]() 是机器人清洁装置和黑板表面的静摩擦系数,
是机器人清洁装置和黑板表面的静摩擦系数,![]() ,
,![]() 是机器人履带轮和黑板表面的静摩擦系数,
是机器人履带轮和黑板表面的静摩擦系数,![]() 如图所示是机器所在坐标系
如图所示是机器所在坐标系![]() 轴与固定坐标系轴
轴与固定坐标系轴![]() 的夾角。
的夾角。
聯立(1)(2)(3)可以算出在静止状态机械所受的临界压力![]() 。通过
。通过![]() 算的临界压强
算的临界压强![]() [7]。经过理论计算和反复实验,如图8所示,最终确定机器吸附压强阈值约为-2.8 Kpa。传感器输出电压为2.26 V。当机器内部压强高于-2.8 kpa时,机器才解开电磁铁在黑板上移动,在移动过程中,当机器内部压强低于-2.8 kpa时,机器蜂鸣器报警,并驱动风机提高转速。
[7]。经过理论计算和反复实验,如图8所示,最终确定机器吸附压强阈值约为-2.8 Kpa。传感器输出电压为2.26 V。当机器内部压强高于-2.8 kpa时,机器才解开电磁铁在黑板上移动,在移动过程中,当机器内部压强低于-2.8 kpa时,机器蜂鸣器报警,并驱动风机提高转速。
为了验证设计的电路是否正确,使用示波器对电机驱动模块PWM进行测量,如图10所示,占空比为70%,测试结果完全正确。
5 结语
本文基于STM32设计的吸附式自动擦黑板机器人,基本完成了系统预期设定的功能,可以在黑板上完成自动清扫的工作,有效地减少了老师和学生对粉尘的吸入。[8]但是由于机器重量和体积的限制,在路径规划方面还存在一定局限性,而且在边角位置清扫的效果不是很理想,所以还需进行更多的测试和改进,提高算法,不断积累经验,以完成机器所有的预期功能。
参考文献
- 李国基. 智能电磁擦黑板机器人的研制[J]. 中国教育技术装备, 2018(01): 42-45+48.
- 周雨松, 熊田忠. 多传感器协同的擦黑板机器人系统研制[J]. 自动化仪表, 2018, 39(11): 42-47+51.
- 韩云飞. 玻璃幕墙清洗机器人的设计与研究[D]. 青岛科技大学, 2018.
- 高正中, 龚群英, 宋森森. 基于STM32的智能平衡车控制系统设计[J]. 现代电子技术, 2016, 39(14): 46-48.
- 周继裕, 张坤忠, 许雪威, 冯仲明. 基于PID算法和STM32的分拣搬运机器人的设计[J]. 仪表技术与传感器, 2017(04): 122-126.
- 罗刘敏, 王明霞, 郭艳花, 刘晓青. 基于单片机的智能小车控制系统设计[J]. 仪表技术与传感器, 2018(01): 123- 126.
- 孙立新, 徐良君, 张明路, 徐子寒, 董鹏, 贾计东. 擦玻璃机器人负压吸附特性研究[J]. 真空科学与技术学报, 2017, 37(04): 357-362.
- 黄蓝青, 张晨雷. 粉笔灰对于身体的危害及解决方法[J]. 清洗世界, 2019, 35(01): 50-51.
