PMU幅值调制误差产生机理分析
2019-11-14刘冉杰
刘冉杰
(国网冀北电力有限公司,北京 100053)
0 引言
广域测量系统(Wide Area Measurement System,WAMS) 是以同步相量测量技术为基础,以电力系统动态过程监测、分析和控制为目标的实时动态监控系统[1],具有异地高精度同步相量测量、高速通信和快速反应等技术特点,非常适合大跨度电网,尤其是我国互联电网的动态过程实时监控。
同步相量测量装置(Phasor Measurement Unit,PMU)作为WAMS系统的核心部分,担任着数据采集、数据处理的重要角色,其数据采集及处理的高精度是WAMS数据有效性、可信性的前提,也是可供主站及其他应用使用的首要条件。其较快的数据处理速度,较常规的SCADA系统,在动态测试等方面有很大的优越性。
幅值调试中相量幅值以一定频率正弦变化,相角、频率及频率变化率不发生变化[2]。这就要求PMU有较高的相量测量精度及快速的响应速度,能够跟踪并反映电网的振荡现象,故分析相量幅值量测误差显得尤为重要。
本文不考虑PMU工作时环境噪声等因素的干扰,以理想数据为基础,理论上分析讨论PMU所采用的FFT算法,在动态测量的幅值调制情况下所引入的测量误差。
1 幅值调制数学模型
PMU内部的信号处理是基于离散傅里叶变换(Discrete Fourier Transform,DFT)[3],而实际应用中大多运用快速傅氏变换(Fast Fourier Transform,FFT)。在探讨PMU动态跟踪能力之前,本文给出被测信号模型的数学模型。PMU的原理结构如图1所示[4]。

图1PMU原理结构图
幅值调制测试用来衡量PMU对电力系统振荡的跟踪能力,测试PMU在不同调制频率的幅值调制信号下,相量量测的幅值、相角精度及频率精度。本文仅从幅值测量精度入手,考量FFT所引入的测量误差。
幅值调制测试信号的模型[5]为

式中:Xm为基波幅值有效值;Xd为幅值调制深度;f为基波频率;fm为调制频率;φm为调制部分初相角;φ0为基波初相角。
测试信号对应的数学模型为

式中:Δl为基波频率的步长量;lm0为幅值调制部分初相角;l0为基波初相角。
FFT处理后所得结果与真实值的误差计算公式[6-7]为

式中:ε为测量误差;XC为FFT计算结果;Un取额定值57.74 V。
对应的数学模型为

2 LabVIEW下测试系统的仿真
LabVIEW(Laboratory VirtualInstrument Engineering Workbench)是一种程序开发环境,由美国国家仪器(NI) 公司研制开发,类似于C和BASIC开发环境。但LabVIEW与其他计算机语言的显著区别是:其他计算机语言都是采用基于文本的语言产生代码,而LabVIEW使用图形化编辑语言G编写程序,产生的程序是框图的形式。LabVIEW包含了多种多样的数学运算函数,特别适合进行模拟、仿真、原型设计等工作。
本文使用LabVIEW在产生理想数据的基础上,调用其内部FFT转换模块,得出测量数据,与真实数据比较,对FFT转换过程中所引入的误差进行探讨。
在使用LabVIEW设计时,从功能角度出发,将本测试系统分为3部分:测试数据的生成;数据处理,即FFT幅值谱运算;测试数据波形显示及数据处理结果显示。
前面板的设计如图2所示。
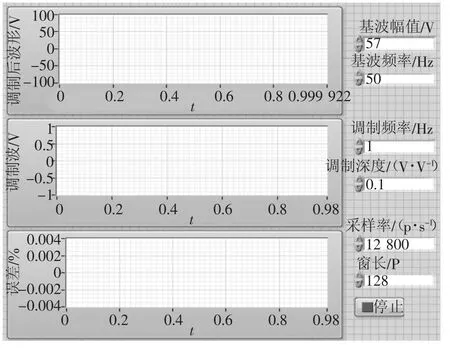
图2 LabVIEW前面板设计显示图
前面板中右侧数据输入VI用来设置测试信号的基本信息,包括基波的幅值和频率,调制信号的频率和调制深度,以及FFT转换时所需的必要信息,采样率及采样点数(数据窗长度)。左侧图形显示VI,分别显示调制之后的波形、调制信号及最终计算的误差。
3 理论分析
3.1 时间戳在数据窗的起始位置
在误差计算时,需要设置作为参考的真实值。此真实值由式(1) 及式(2) 计算获得。
本小节考虑时间戳在数据窗起始位置的情况。
设置调制频率为0.5 Hz,调制深度为0.1,仿真计算FFT计算结果与真实值之间的误差如图3所示,将误差波形数据导出的结果见表1。
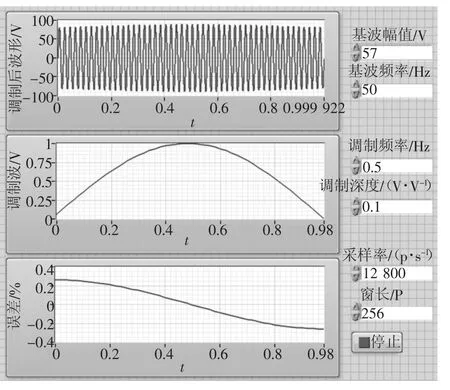
图3 运算结果(调制频率0.5 Hz,调制深度0.1,时间戳位于数据窗起始位置)

表1 误差表格(调制频率0.5 Hz,调制深度0.1,时间戳位于数据窗起始位置)
由图3与表1可得出结论1,在正弦调制波形的波峰(或者波谷)时,FFT运算与真实值之间的误差最小,为-0.005884%,对于测量误差量限为0.2%的PMU来说,理论上是不影响的。但在调制波形的过零点处,由于调制波形变化率最大,所以FFT所引入的误差也是最大的,为0.26%左右,在没有额外补偿的情况下,此时考虑PMU采集误差的大小是不合理的。
设置调制频率为1 Hz,调制深度为0.1,仿真计算FFT计算结果与真实值之间的误差如图4所示,将误差波形数据导出的结果见表2。
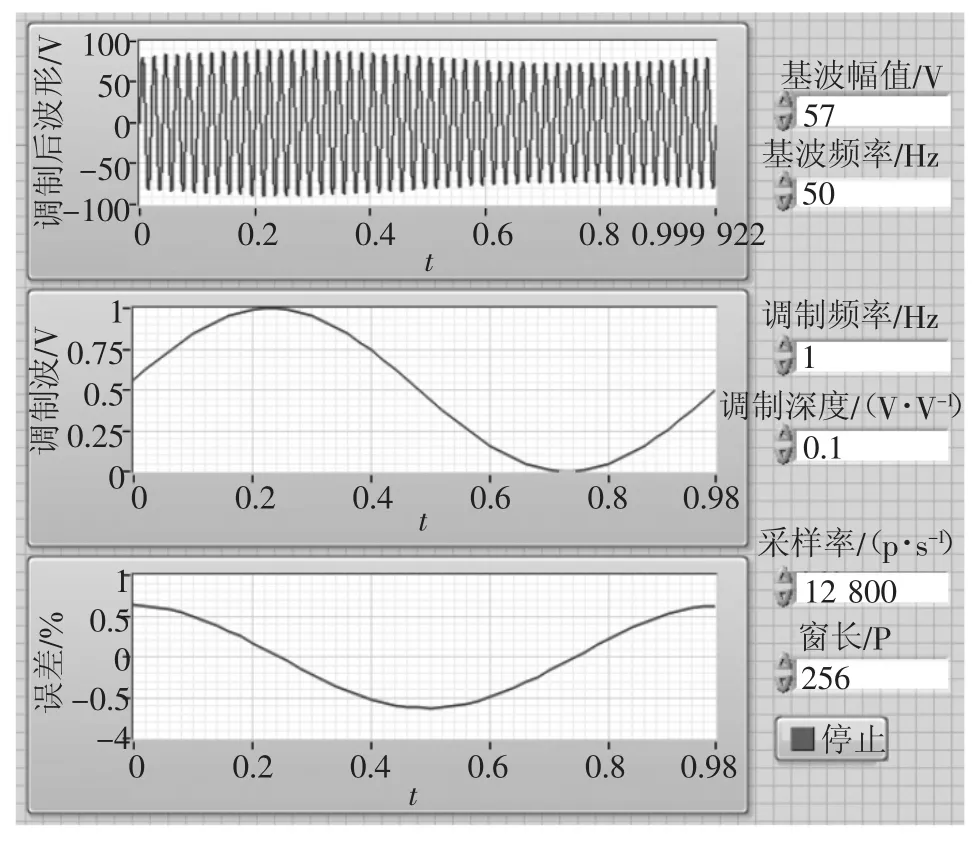
图4 运算结果(调制频率1 Hz,调制深度0.1,时间戳位于数据窗起始位置)
由图4与表2能得出与结论1相似的结论,且随着调制频率的增大,所引入的误差也越大。
3.2 时间戳在数据窗的中间位置
在计算真实值时,额外补偿半个数据窗对应的时长,使得真实值与数据窗中心位置相对应。此时式 (4) 变化为

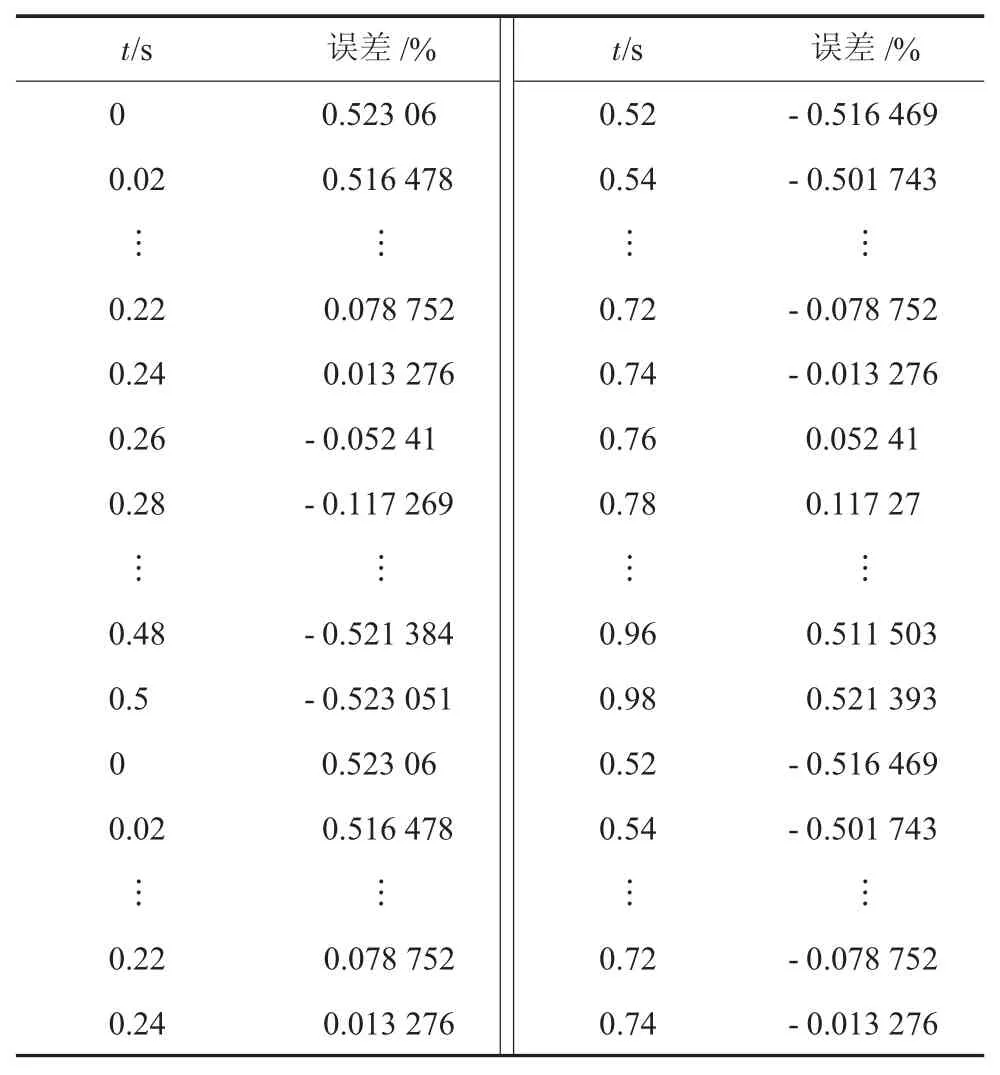
表2 误差表格(调制频率1 Hz,调制深度0.1,时间戳位于数据窗起始位置)
重新计算误差,结果如图5所示,将误差波形数据导出的结果见表3。
由图5与表3得出结论2:相对于时间戳在数据窗的起始位置而言,FFT运算所引入的误差级别小了很多,且误差最大值所处的位置为调制波形的波峰与波谷的位置。
设置调制频率为1 Hz,调制深度为0.1,仿真计算FFT计算结果与真实值之间的误差如图6所示,将误差波形数据导出的结果见表4。
由图6与数据表4能得出与结论2相似的结论,同样,随着调制频率的增大,所引入的误差也越大。

图5 运算结果(调制频率0.5 Hz,调制深度0.1,时间戳位于数据窗中间位置)

表3 误差表格(调制频率0.5Hz,调制深度0.1,时间戳位于数据窗中间位置)

图6 运算结果(调制频率1 Hz,调制深度0.1,时间戳位于数据窗中间位置)

表4 误差表格(调制频率1 Hz,调制深度0.1,时间戳位于数据窗中间位置)
4 实测验证
采用WAMS测试仪WT1312A(0.05%级带时标三相精密源)对南瑞科技NSR-3710进行测试,在调制频率为1 Hz、调制深度为0.1、时间戳位于数据窗起始位置时,所得幅值测量误差与本文研究相符。
5 结论
对于采用FFT运算的PMU而言,在测量幅值调制信号时,时间戳相对于数据窗的位置直接影响运算的精度。当时间戳在数据窗的起始位置时,在调制波形的波峰与波谷处,FFT所引入的误差最小;而当时间戳在数据窗的中间位置时,FFT所引入的误差相对于在起始位置时所引入的误差小了很多,且在调制波形的波峰与波谷位置较大。