基于openmv的电磁炮智能控制系统
2019-11-13苏瑞于浩周沛泽兰扬
苏瑞 于浩 周沛泽 兰扬

【摘 要】本文根据电磁曲射炮的工作原理,结合当前嵌入式系统设计方法实现了以STM32F103为核心的电磁炮智能发射控制系统,该系统由发射装置和控制装置两部分组成,本文选择基于 OpenMV 机器视觉模块,通过调焦摄像头识别标识物,实现对发射装置方向的控制。通过对实验数据的分析,得出最终控制算法,从而提高了电磁炮射击落点的准确度。
【关键词】电磁;升压电路;OPENMV;角速度控制
中图分类号: TJ866文献标识码: A 文章编号: 2095-2457(2019)30-0047-001
DOI:10.19694/j.cnki.issn2095-2457.2019.30.021
0 引言
电磁炮可以利用电磁能推动物体运动,其威力远大于传统的火炮,从而引起了国内外的广泛关注。而OpenMV相较于其他视觉模块,体积小、功能多且易于安装,从而选择OpenMV为基础模块,实现电磁炮的智能控制系统。
1 系统与方案
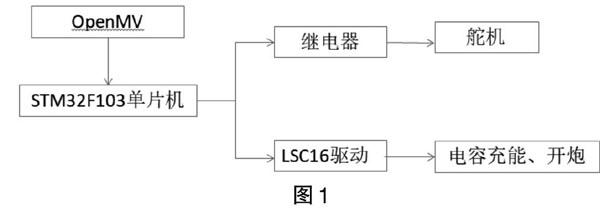
系统包括STM32F103单片机、升压模块、直流舵机、OpenMV、线圈,由OpenMV视觉模块进行目标定位[1],进而由单片机控制电机来控制炮管的方向与速度,由电源控制线圈发射,达到精确命中目标的目的[2],框图如下图1:
图1
电路方案选择根据电容充放电原理,自行搭建电路。电容充电时间短,且放电的瞬间可以产生巨大电能,通过升压模块[3],将电压储存在电容中,可以有效控制钢珠的发射。单片机方案选择STM32F103单片机。STM32具有丰富的硬件资源,拓展性强,接口多且相对简单,因为它本身带有功能,工作速度快,高性能、低成本、低电压、节能,外围接口丰富,适用于要求功能多的装置上。
单片机方案选择STM32F103单片机。STM32具有丰富的硬件资源,拓展性强,接口多且相对简单,因为它本身带有功能,工作速度快,高性能、低成本、低电压、节能,外围接口丰富,适用于要求功能多的装置上。
2 理论分析与计算
2.1 电磁炮参数计算与弹道分析
弹丸的出口速度可以由一对间距为10cm的对射广电进行测量,可等效为炮口初速度vY=vsin?鄣,再由公式vy=2gh可以求出上升的最大高度。同时根据h=■gt■,vx=vcos?鄣,s=t■程序即可快速计算出射程。
图2
2.2 电路参数
本电路采用逆变器将24V直流电升高至230V接入电路,且使用一个450V 1000μF电容作为整体的储能元件,并在电容的正极连结整流二极管以防止电容在充电同时放电,且在电容电极输入端接入4个功率电阻共计600Ω以限制充电电流在1A以下。在电路中接入可控硅来控制电容的放电过程,可控硅的控制端连接限流电阻接入24V电压,在导通时使电容对线圈放电以发射钢珠。
3 执行机构控制
执行机构选用云臺控制,以实现水平和竖直方向的精确旋转,以达到精确控制的目的;通过STM32单片机与OPENMV的串口通信[4],OPENMV向STM32发送标识的坐标[5],单片机控制云台瞄准,再控制继电器控制充电时间和开火。同时也可以通过按键输入坐标进行控制。
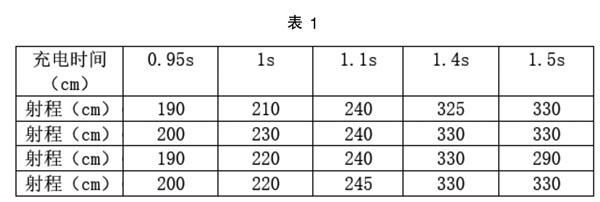
4 数据与分析
炮筒位置与炮筒仰角45度不变,改变供电时间,记录其射程。
将以上两组数据对比,经过MATLAB数据建模,得出充电时间与发射距离为非线性关系,充电时间越长曲线越平缓。
5 结论
本文采用的基于openmv的电磁炮智能发射系统是由发射装置和控制装置两部分组成,发射装置实现电能到磁场能量再到动能的能量转换,从而推动被弹射物体获得冲量向外运动。控制装置主要通过控制舵机实现发射装置水平角度的控制,通过两部分的智能连接,实现了电磁炮的智能发射。
【参考文献】
[1]冯晓晖.电磁炮物理模型构建与系统实现研究[J].黑龙江科学,2018(5):134-135.
[2]唐勇,费付聪,周延.自制演示型电磁炮及其相关研究[J].2015,36(1):47-48.
[3]邱关源.电路(第五版).北京:高等教育出版社,2006.126-129.
[4]张彦超.运动目标跟踪技术的研究[D].北京:北京交通大学,2014.
[5]张毅,高进可,王琪,等.视觉导引智能车的自适应路径识别及控制研究[J].测控技术,2017,36(11):23.
