智能机器人恒力装置硬件系统的设计
2019-11-12李端李焕锋严智超
李端 李焕锋 严智超

摘要:本文设计一种独立于工业机器人之外的恒力装置,即工业机器人仅负责抛光轨迹的控制,恒力装置负责控制抛光压力的大小。针对氧化锆陶瓷手机后盖这种薄脆类曲面工件的抛光,通过精确控制抛光压力的大小并保持恒定,有利于实现材料的塑性去除,提高工件表面材料去除均匀一致性,从而获得无损、平滑的工件表面。
关键词:恒压力;机器人;氧化锆陶瓷;恒力装置
中图分类号:TP393 文献标识码:A
文章编号:1009-3044(2019)25-0214-03
随着5G信号与无线充电技术的发展,金属手机后盖由于具有较高的电磁信号屏蔽性而开始逐步退出中高端手机后盖市场,氧化锆陶瓷手机后盖则凭借优秀的抗摔耐磨、低电磁屏蔽性等特性逐渐在手机后盖市场中脱颖而出,目前抛光类工业机器人的恒压力控制一直是热门研究课题,抛光压力的大小直接影响工件加工的效率及质量,过大的抛光压力导致材料去除量较大;过小的抛光压力导致较小的材料去除率,无法达到理想的效果。
1 恒力装置设计方案
1.1 恒力装置工作原理
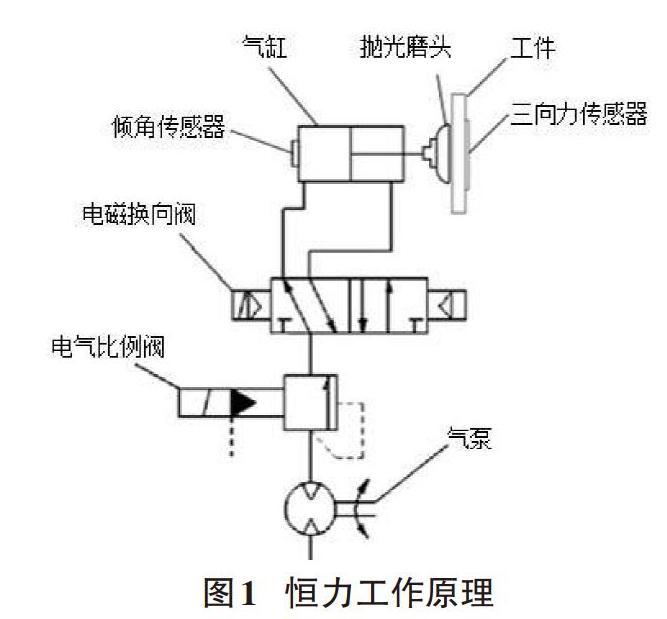
恒力装置设计采用主动柔性控制方案,其工作原理如上图1所示。该恒力装置采用气缸作为动力执行元件,通过电气比例阀调节气缸的输出压力大小,通过两位五通电磁换向阀控制气缸输出压力方向。气缸元件被安装于机械臂末端与抛光磨头之间,当处于非工作状态时,气缸处于最大行程处,对外无作用力输出;当处于抛光状态时,气缸受到外力处于收缩状态,此时对外有作用力输出,遭遇外力突然增大时,气缸由于输出压力小于外力进行自然顺从性向内缩进,反之遭遇外力突然减小时,气缸由于输出压力大于外力进行自然顺从性向外伸长,同时控制器接收抛光压力信号,调节气缸内部气体压力,实现抛光压力的恒定。
1.2 恒力装置的整体框架
恒力装置的整体框架如上图2所示,主要包括硬件系统与软件系统的设计。 硬件系统作为一个闭环压力测控系统,主要涉及工控机、恒力执行机构(气缸)、倾角传感器、三向力传感器、電气比例阀、电磁换向阀等元器件,其中恒力执行机构作为被控对象,负责抛光压力的动力输出;电气比例阀与电磁换向阀作为调控元件,分别负责控制抛光压力的大小与方向;三向力传感器与倾角传感器负责对机器人手臂末端不同姿态下抛光压力的精确测量;工控机作为控制器,利用先进的控制算法直接控制电气比例阀与电磁换向阀的输出,进而实现抛光压力的恒定控制。
2 硬件系统设计
2.1 恒力执行机构机械结构设计
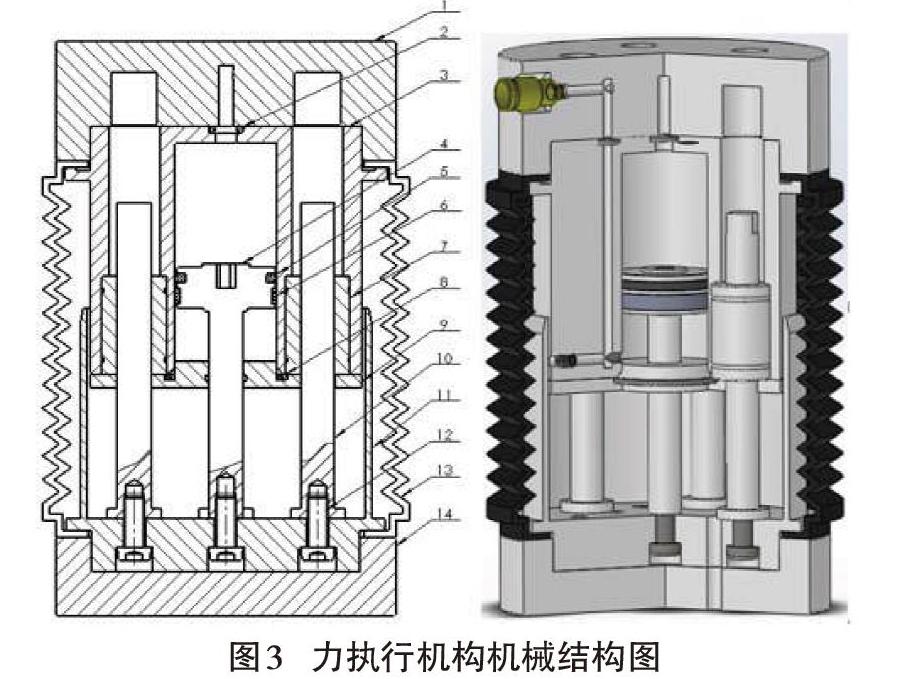
恒力执行机构采用气缸作为动力元件,抛光压力主要由气缸活塞杆提供,由于恒力执行机构,抛光过程中活塞杆会受到较大的弯矩,降低气缸的伸缩性及刚性,因此本文对气缸本体进行结构优化。恒力执行机构的装配图与三维模型如上图3示,上端盖上表面存在的螺纹通孔与沉头孔分别用于连接机械手臂末端法兰与气缸本体;气缸本体外形类似一柱状体,该柱状体中心孔为缸筒,中心孔周围均匀分布的四个通孔为直线轴承安装孔,导向轴随缸筒内活塞的伸缩沿直线轴承轴线方向滑动,气缸端盖通过密封圈对气缸本体进行密封处理,并且起固定直线轴承作用;气缸套筒底面通过螺纹连接四个导向轴与活塞杆,随活塞杆的伸缩而上下往返运动;下端盖通过沉头孔与气缸缸套螺纹连接,通过螺纹通孔与抛光磨头连接;上下端盖之间安装橡胶防尘罩,可随活塞的伸缩自动拉伸与折叠。恒力执行机构伸缩范围为0-50mm,输入气压在0.1-0.5MPa之间,最大输出压力为350N,本体重量2.4kg,可连接负载小于6kg。
2.2 传感器安装与抛光力计算
2.2.1传感器安装位置
倾角传感器主要用于测量机械手臂末端执行器姿态参数,需直接水平安装于机械手臂末端,恒力执行机构由于内部结构紧凑,不适于安装传感器,因此倾角传感器安装于恒力执行机构与机械手臂末端法兰之间,如下图4示。
三向力传感器主要用于直接测量抛光过程中三维方向上抛光力的大小,如上图4示,三向力传感器可安装于恒力执行机构与抛光磨头之间,或者安装于手机后盖夹具的连接件下方,第一种方案中三向力传感器的Z轴力的方向即为抛光压力方向,Z轴所测力大小与抛光磨头重力沿抛光压力方向的分力之和即为抛光压力大小,抛光水平切削力即为三向力传感器X、Y轴的合力,该方案通用性较高,但直接安装于机械手臂末端,加大了抛光过程中磨头振动,因此影响三向力传感器应变片的精准输出。第二种方案中三向力传感器位置固定不变,根据倾角传感器测得抛光压力的方向参数,抛光压力大小为X、Y、Z三抛光力沿抛光压力方向的分力之和,抛光水平切削力需根据测得抛光力合力与抛光压力大小求解。因此选择将三向力传感器固定安装于手机后盖夹具的连接件下方,通过橡胶垫进行密封防水处理,此状态下三向力传感器性能稳定可靠,且寿命较长。
2.2.2抛光力计算
2.2.3 硬件逻辑结构设计
恒力装置的硬件整体逻辑结构如下图6示,恒力执行机构作为测控系统中的被控对象,其直接被安装于机械手臂末端与抛光磨头之间,气源由空压机提供,首先流入电气比例阀,工控机通过输出电压模拟量调节电气比例阀输出气体压力,进而控制恒力执行机构输出压力大小;而后气体进入两位五通式电磁换向阀,工控机通过输出数字量控制换向阀通断,进而控制恒力执行机构输出压力方向;三向力传感器测量抛光压力在空间X、Y、Z轴三方向的分力,倾角传感器测量恒力执行机构抛光过程中的姿态参数;工控机将接收反馈的三向力数据与倾角参数通过式(4)与式(5)分别转换为抛光水平切削力与抛光压力数据,然后根据压力设定值与实际测量值的误差,采用先进算法调节电气比例阀与电磁换向阀,进而实现稳定、快速、准确地控制抛光压力。
3结论
本文研究了目前3D氧化锆陶瓷手机后盖抛光现状,针对其抛光过程中存在的低良品率、低效率、高成本问题,提出一种基于工业机器人的恒压力柔性抛光方案。
1) 恒力装置安装于工业机器人手臂末端与抛光磨头之间,采用气缸作为动力输出元件,伸缩行程为0-50mm,最大输出压力约350N,可连接最大负载约6kg。
2) 构建了由工业机器人、抛光磨头、恒力装置、工作台与夹具五部分组成的工具型工业机器人抛光实验平台。工作台尺寸设计及安装位置主要考虑工业机器人的运动轨迹,主要功能为夹具的安装固定,夹具的设计采用真空吸附原理,通过优化夹具结构可稳固吸附氧化锆陶瓷手机后盖。
参考文献:
[1] 陈辞. 具有执行器非线性和状态约束的机器人自适应控制[D]. 广东工业大学,2016.
[2] 秦辉明, 李笑. 基于广域网的遥控操作工程机器人神经网络控制[J]. 机床与液压, 2014(3):5-8.
[3] 翟敬梅, 康博, 唐会华. 工业机器人轨迹跟踪的自适应模糊变结构算法[J]. 华南理工大学学报:自然科学版, 2012, 40(12).
[4] 黄琴. 基于工业机器人的水龙头打磨抛光系统的设计与开发[D]. 浙江工业大学,2016.
[5] 王晓辉, 汪菊英, 聂小春. 手机面板玻璃CNC精雕加工工艺及夹具设计[J]. 装备制造技术, 2015(6):23-25.
[6] 魏勇, 伍爱民. 真空吸附夹具系统的设计[J]. 电讯技术, 2008, 48(4):107-110.
[7] 刘涛, 高慧莹, 张领强,等. 化学机械抛光压力控制技术研究[J]. 电子工业专用设备, 2010, 39(9):9-13.
[8] Petrov M, Ganchev I, Taneva A. Fuzzy PID control of nonlinear plants[C]// Intelligent Systems, First International IEEE Symposium,2002.
【通联编辑:唐一东】