基于高精密AD轴角转换芯片的测角技术研究
2019-11-11娄敏赵英
娄敏 赵英
摘 要:圆感应同步器作为一种测角传感器其常用的解码芯片为AD2S80,此芯片具有体积大、电源要求高、转速低、配置元件多等局限,使得其使用起来有诸多不便,文章介绍一种可用于圆感应同步器信号解码的专用芯片AD2S1210,它能够将圆感应同步器输出的模拟量转为数字量,同时具有体积小、配置元件少、供电简单、转速高等诸多优点。
关键词:圆感应同步器;定子;转子;AD2S1210
中图分类号:TH712 文献标志码:A 文章编号:2095-2945(2019)28-0163-02
Abstract: As a kind of angle measuring sensor, the common decoding chip of rotary Inductosyn is AD2S80, which has many limitations, such as large size, high power requirement, low speed, many configuration elements and so on, which makes it inconvenient to use. This paper introduces a special chip AD2S1210, which can be used for circular Inductosyn signal decoding, which can convert the analog output of circular Inductosyn into digital quantity. At the same time, it has the advantages of small size, few configuration elements, simple power supply and high rotational speed.
Keywords: Rotary Inductosyn; stator; rotor; AD2S1210
引言
圆感应同步器直接输出的是模拟信号,此模拟信号经解码后被转为数字信号,可被后续控制系统接收。目前工业上应用较多的解码芯片是AD2S80[1],此芯片具有体积大、电源要求高、转速低、配置元件多等局限,使得其使用起来有诸多不便,本文介绍一种可用于圆感应同步器信号解码的专用芯片AD2S1210,它能够将圆感应同步器输出的模拟量转为数字量,同时具有体积小、配置元件少、供电简单、转速高等诸多优点。
1 圆感应同步器测角系统的工作原理
圆感应同步器是通过对其转子施加交流激励信号,定子将感应出两相的sin、cos正余弦信号,两路信号在空间相位上相差90度电角度,当sin信号幅度最大时,cos信号幅度最小,反之当cos信号幅度最大时,sin信号幅度最小,当处于某个电角度φ,sin信号的幅度为Asinφ,cos信号的幅度为Acosφ,式中A为sin(或cos)信号的最大幅度值[2]。
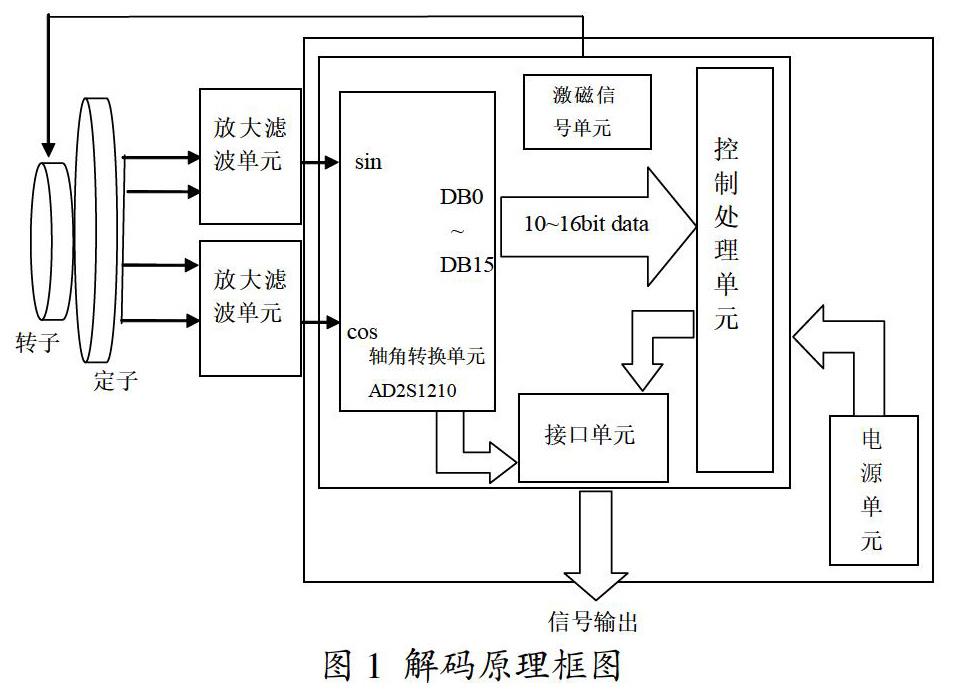
本文选用美国ADI公司轴角转换芯片AD2S1210作为核心角度解码器,它可以直接输出10KH在的交流激励信号驱动同步器转子工作,同时能接收定子感应出的sin、cos信号并将其转换成代表角度值的数字量,以该芯片为核心搭建的系统框图如图1。
图1为圆感应同步器的解码原理框图,电路系统要通过激磁信号单元发出一个交流信号驱动转子工作,定子感应出与同频率的sin、cos信号在放大滤波单元中进行信号调理[3],经轴角转换单元后由控制处理单元进行接收,随后再由接口单元进行信号输出。
2 AD2S1210芯片在角度解码中的应用
2.1 AD2S1210芯片简介
轴角转换单元中的主要器件即AD2S1210,AD2S1210具有14位分辨率,相对于广泛使用的AD2S80轴角转换芯片,其主要优点如下:
(1)尺寸小:AD2S80为51mm*16mm,AD2S1210为9mm*9mm;
(2)供电简单:AD2S80需要+12V、-12V、+5V三种电源供电,AD2S1210仅需+5V供电;
(3)外围配置简单:AD2S80在使用时需根据分辨率不同而配置不同的电阻、电容元件,AD2S1210外围分立配置元件少;
(4)跟踪转速高:AD2S180在14位分辨率下对应的跟踪转速为65转/秒。AD2S1210在14位分辨率下对应的跟踪转速为500转/秒。
2.2 AD2S1210的控制引脚设置
AD2S1210芯片的两相输入sin、cos信号是感应同步器输出信号,通过AD2S1210 将输入信号转化为自然的二进制数字角度,这是实现系统功能的关键。AD2S1210是一种可变分辨率、单片数字分解转换器,该芯片具有48个引脚,其内部有15个控制寄存器,8种读写时序。因此通过对其内部控制时序进行合理设置是实现轴角转换的关键技术。
本文采用CPLD来实现控制控制处理单元,用于控制AD2S1210,其中控制引脚共12个,分别为RES0、RES1、CS、RD、WR、SOE、SAMPLE、A0、A1、DOS、LOT、RESET。下面对这些控制引脚进行介绍:
(1)当对RES0设置为0、RES1设置为1时即可将芯片的分辨率设置为14位;
(2)令CS=0即对该芯片进行片选;
(3)可通过设置RD、WR的引脚来对芯片的控制寄存器及位置数据进行读取、写入;
(4)通过设定SOE=1实现并行传输,芯片的角度数字量通过DB1~DB16输出;
(5)SAMPLE发生下降沿将转换完成的数据进行锁存;
(6)DB1~DB14为数据位,其中DB14为数据的最高位,DB1为数据的最低位;
(7)令A0=1、A1=1时设置AD2S1210芯片的工作模式为构造模式,在构造模式下可读取芯片的误差寄存器,设置芯片的各控制寄存器的参数。令A0=0、A1=0时设置AD2S1210芯片的工作模式为正常模式,在该模式下读取角度位置;
(8)DOS、LOT的电平值有任何一位为低电平时则表示有误差;
(9)RESET引脚在芯片上电时需置0,随后置高以使得芯片正常工作。
2.3 AD2S1210硬件電路图
图2为AD2S1210芯片的硬件电路图,由图可见芯片外围器件除了滤波、晶振外,无需任何其他配置器件。
3 系统检测
测试过程中所用的硬件设备如下:
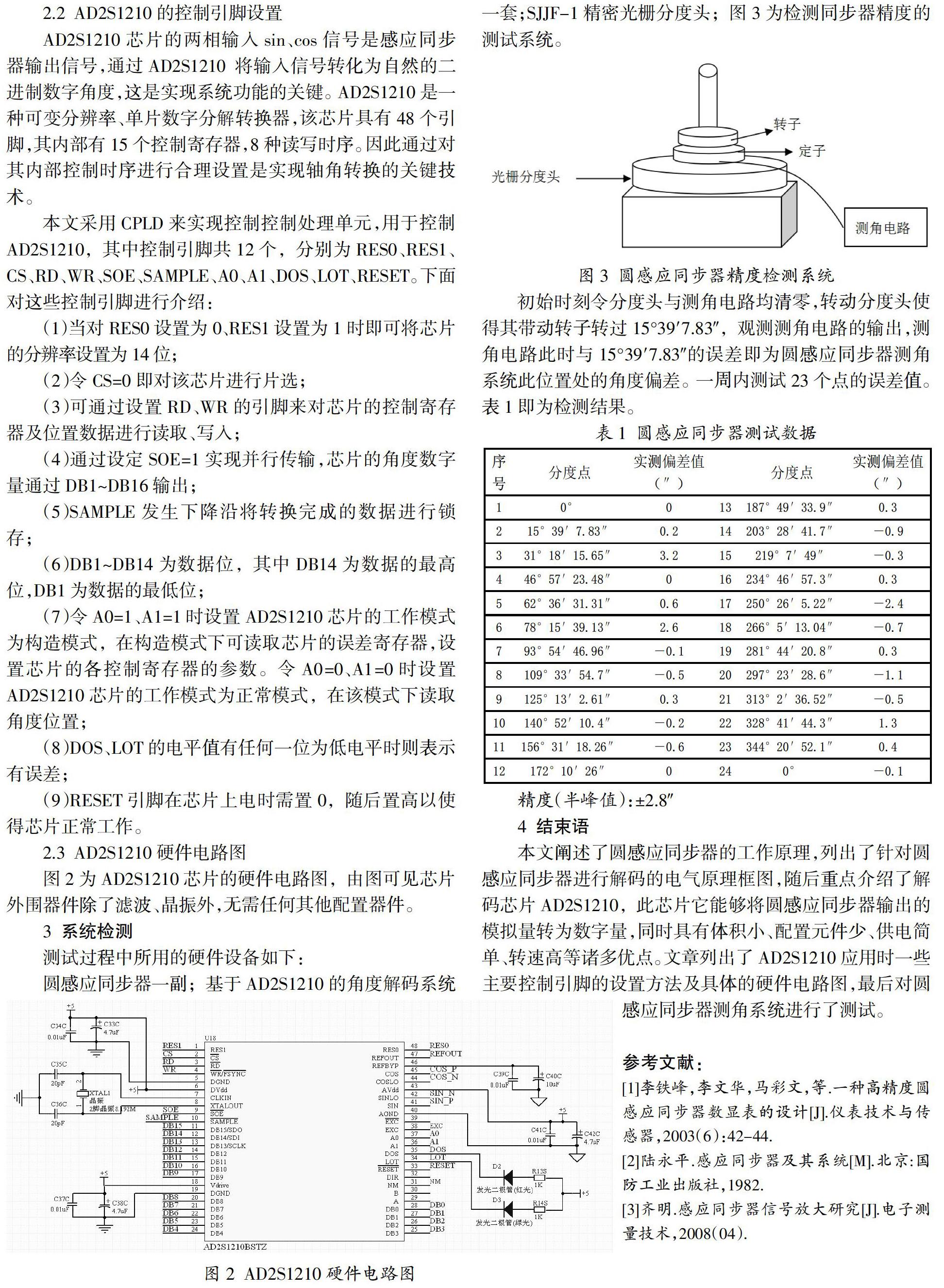
圆感应同步器一副;基于AD2S1210的角度解码系统一套;SJJF-1精密光栅分度头;图3为检测同步器精度的测试系统。
初始时刻令分度头与测角电路均清零,转动分度头使得其带动转子转过15°39′7.83″,观测测角电路的输出,测角电路此时与15°39′7.83″的误差即为圆感应同步器测角系统此位置处的角度偏差。一周内测试23个点的误差值。表1即为检测结果。
4 结束语
本文阐述了圆感应同步器的工作原理,列出了针对圆感应同步器进行解码的电气原理框图,随后重点介绍了解码芯片AD2S1210,此芯片它能够将圆感应同步器输出的模拟量转为数字量,同时具有体积小、配置元件少、供电简单、转速高等诸多优点。文章列出了AD2S1210应用时一些主要控制引脚的设置方法及具体的硬件电路图,最后对圆感应同步器测角系统进行了测试。
参考文献:
[1]李铁峰,李文华,马彩文,等.一种高精度圆感应同步器数显表的设计[J].仪表技术与传感器,2003(6):42-44.
[2]陆永平.感应同步器及其系统[M].北京:国防工业出版社,1982.
[3]齐明.感应同步器信号放大研究[J].电子测量技术,2008(04).
