基于车联网技术的无人驾驶新能源汽车运动控制研究
2019-11-08李帆
李帆


摘要:为了提高无人驾驶新能源汽车的行驶安全性,文章基于车联网技术分析了无人驾驶新能源汽车控制系统框架,包括车栽单元、路侧单元及中央控制单元三部分,车载单元采集车辆自身信息、道路车辆信息、道路通行状况等,路侧单元承担信息传输工作。中央单元将接收采集的车辆信息、道路信息等根据预先设定好的算法进行处理,发送控制命令,并以汽车的油门控制、汽车视觉目标识别及跟踪控制为例阐述了其控制算法,期望通过该研究提高无人驾驶新能源汽车的行驶安全性。
关键词:车联网技术;无人驾驶;新能源汽车;运动控制
中图分类号:TP301.6 文献标识码:A 文章编号:1001-5922(2019)09-0172-06
近些年,由于国内汽车保有量日益增多,汽车尾气污染及其驾驶安全问题更到更多人的重视和关注,新能源汽车及其无人驾驶汽车成为多数人关注的重点。新能源汽车就是采用非常规的车用燃料当做动力来源的车辆,其中,电动汽车是最常见的一类。
随着智能控制技术的发展及其广泛使用,无人驾驶汽车得到更迅速的发展,与传统汽车比较,无人驾驶新能源汽车可以减轻驾驶人员操作汽车强度,也有利于降低驾驶人员不规范及其误操作行为,对提升汽车行驶的安全性、乘坐舒适性具有重要的意义。继互联网技术、物联网技术发展后,“车联网”成为未来智能城市发展一个重要的标志。利用车联网,汽车具有高度智能的车载信息系统,并支持与城市交通信息网络、智能电网等实现连接,能够随时随地获取相关资讯,并做出与交通出行有关的明智选择。因此,本文基于车联网技术对无人驾驶新能源汽车的控制系统进行设计,应用多传感器信息技术、无线通信、远程感应技术、全球定位系统(GPS)导航技术,让无人驾驶汽车自动避障,自动选择最佳的行驶方案,实现智能化交通管理和车辆智能化控制的一体化,从而大大缓解交通堵塞,提高无人驾驶汽车的安全性能。
1车联网网络架构
车联网就是借助在车辆上安装通信终端,在通信网络平台上对各类车辆属性及其形式状态展开信息提取操作,并充分运用这些信息,依据不同的功能需求,对所监测车辆实施恰当的监管,提供支持综合服务的系统。车联网通过计算机、传感、网络等先进技术对车辆及其道路实施全面感知,并在处于行驶状态下不同车辆、车辆和基站质检创建无线通信,顺利完成信息分发处理。对每一辆汽车运行中全过程控制,提升拥堵时段道路通行效率,确保行驶车辆的安全。与此同时,通过多跳转发的方法,信号范围外各车辆之间可支持创建通信连接,顺利完成信息共享。车联网中的车车、车路通信构成的网络结构,如图1所示,包括车载单元(on Board Unit,OBU)、道路兩侧的路边协调控制单元(Road Side Unit,RSU)及中央控制单元三部分。
2基于车联网的无人驾驶新能源汽车控制系统设计
2.1系统框架
基于车联网技术对无人驾驶新能源汽车控制系统进行设计其主要目标是实现在任何时刻和环境的路况信息感知、汽车自身信息感知,最大限度地减少交通事故与拥堵的发生,确保无人驾驶汽车的安全、协调、畅通行驶。结合上文的车辆网技术结构,基于车联网的无人驾驶汽车控制系统整体架构分成车载单元(OBU)、路侧单元(RSU)及中央控制单元三部分,基于车联网的无人驾驶新能源汽车控制系统框架如图2所示。
2.2系统模块
2.2.1车载单元
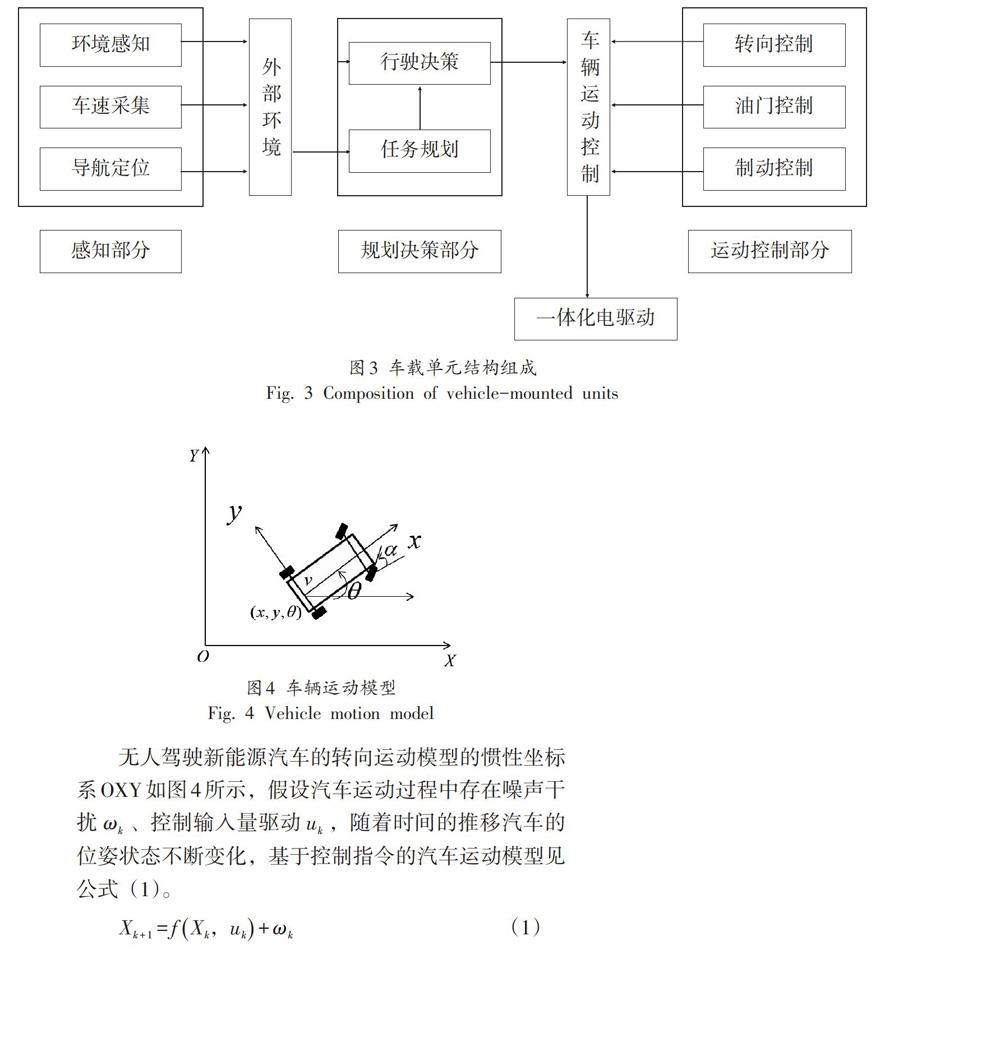
车载单元由环境感知部分、决策部分、控制执行部分、一体化电驱动部分、无线通信部分组成,如图3所示。一体化电驱动部分由驱动电机、变速器和其他传动装置构成,是目前电驱动系统构型的最佳方案。环境感知部分由各个传感器组成,主要采集无人车及周围车辆的运动状态信息,包括车辆的位置、行驶时间、前后车车距、速度及道路交通信息流等信息传输到中央控制单元,如激光雷达置于车辆顶部用于测量近距离,毫米波雷达置于车辆前方用于测量远距离,视觉传感器位于车辆顶部或者车内后视镜背面,车速采集由车速编码器实现;定位导航由GPS系统完成,分析车辆的地理位置与时间;无人驾驶汽车在环境传感器安装完毕之后需要进行各传感器坐标的联合标定,这是实现无人驾驶汽车采集环境信息的前提基础。汽车接收中央控制单元的控制命令,控制车辆的转向、油门、制动状态,执行机构的伺服电机负责控制车辆的踏板,进而通过底层驱动系统控制车辆的纵向运动。
2.2.2路侧单元
路侧单元是一个信息传输中枢,通过无线通信模块接口与车载单元连接,接收车载单元发出的车辆通行信息,同时,路侧单元将车载单元采集到的道路路况信息、道路气象信息、车辆信息等发送到中央控制单元,并接收中央控制单元的处理结果发送给车载单元,以更好的协调控制无人汽车的运行。
2.2.3中央控制单元
中央控制单元是无人驾驶新能源汽车的关键部分和“大脑”,中央控制单元将接收采集的车辆信息、道路信息等根据预先设定好的算法进行处理,确保无人汽车对其他汽车或行人等障碍物时要实现对其避让;汽车根据路侧单元和中央控制单元双重指示实时控制自己的行驶状态,实现无人汽车的油门、制动、道路避障及目标跟踪等控制,确保车辆的安全、高效通行。
3无人驾驶新能源汽车运动控制
由于无人驾驶新能源汽车运动控制包含的内容较多,以油门控制和汽车视觉目标识别及跟踪控制为例进行阐述。
3.1无人驾驶新能源汽车运动学模型
3.3无人驾驶新能源汽车视觉目标识别及跟踪控制
3.3.1目标图像的特征提取
由于无人驾驶新能源汽车在行驶过程中需要通过摄像头采集道路及车辆信息,为了避免发生碰撞需要对目标进行识别和跟踪控制。在识别过程中首先对摄像头采集的图像进行视频全区域定义,目标区域定义为I,然后对视频图像进行灰度处理,增强图像梯度,采用双边滤波去除图像噪声。结合Canny算子提取视频图像的边缘信息,得到图像轮廓,定义为感兴趣区域ROI,精准识别该区域内包含的目标特征。
3.3.2目标特征的协方差描述
3.3.3目标特征的融合表述
经过前期图像预处理,较为粗略的寻找图像ROI区域,无人驾驶新能源汽车识别目标为非线性,并且呈现出高概率密度区域的特点,识别目标状态变化复杂,因此为了便于计算采用粒子滤波算法将状态空间模型目标跟踪问题转化为状态估计问题,并对ROI目标区域进行特征融合表述,利用一组带有权值的粒子来近似表示k时刻目标状态的先验概率,目标的状态用粒子sik表示。在此过程中,定义状态空间模型见公式(8)。
根据输出的结果对目标状态进行预测,更新相关数值,如果满足条件则结束,如果不满足条件则返回继续迭代。
综上,汽车采集的视频图像处理及目标追踪流程如图6所示。
4结语
综上所述,该研究提出的基于车联网技术的无人驾驶新能源汽车控制系统及运动控制方案,可以通过嵌入车联网平台顺利实现车辆运行状态监控,并通过与中央控制单元之间的信息实现交互,顺利完成车俩运行状态、行驶路线等信息采集与处理工作,确保车辆安全、稳定的运行。但是该研究处于初级阶段,日后还需要进行进一步完善。
