高压大电流绝缘栅驱动器验证平台
2019-11-06初振东
唐 宁,初振东
(中国电子科技集团公司第四十七研究所,沈阳 110032)
1 引 言
在对高压大电流绝缘栅驱动器进行应用验证的过程中,通常需要验证不同的母线电压、不同的负载电阻以及不同频率下驱动器的工作特性。高压大电流绝缘栅驱动器通常应用在母线电压较高、负载电流较大的场合,应用验证过程中,必须确保系统的安全稳定性[1]。
因此,设计一种高压大电流绝缘栅驱动器验证平台,使具有一定的保护机制,确保应用验证过程中系统的安全稳定性[2]。同时,验证平台具有一定的灵活性,可以验证不同频率、不同母线电压和不同负载电流下绝缘栅驱动器的工作特性。
2 功能概述
高压大电流绝缘栅驱动器验证平台的功能框图如图1所示。系统由上位机和下位机共同组成。下位机主要以Cortex-M4 系列的ARM 为核心,完成整个验证平台的信号采集和时序控制等功能;上位机主要具有参数配置和报表存储等功能。
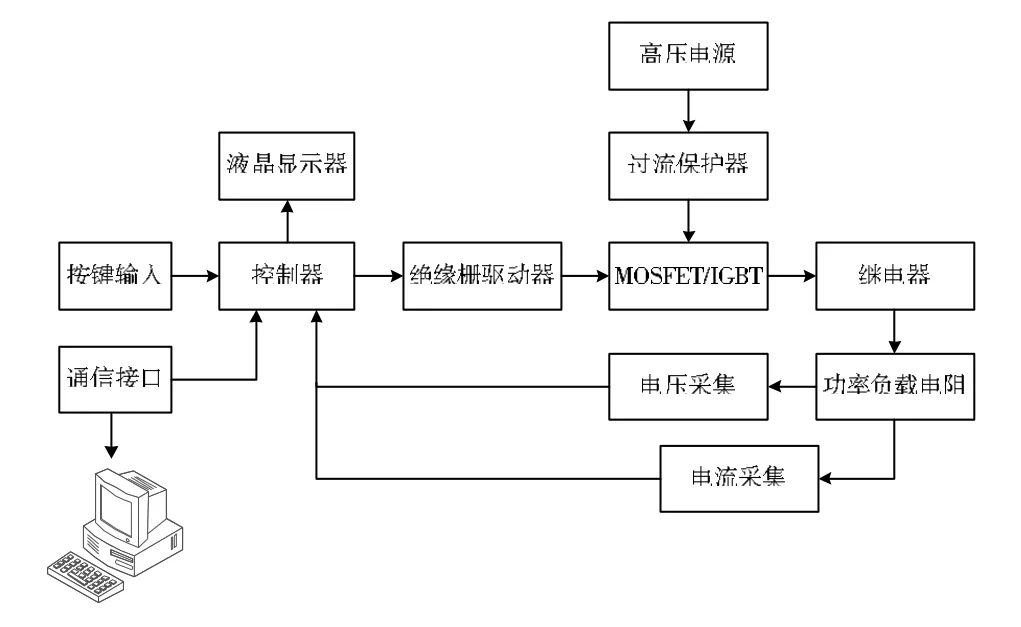
图1 高压大电流绝缘栅驱动器验证平台功能框图
通过按键输入可以调节频率,控制器可根据当前按键调节的频率,产生PWM 信号,控制绝缘栅驱动器。绝缘栅驱动器的后级接有MOSFET 和IGBT,以形成负载驱动电路。可调高压电源经过流保护器后,为系统提供母线电压[3]。通常通过阻性负载来验证绝缘栅驱动器在高压大电流情况下的工作情况,因此,针对不同负载进行应用验证时,可以通过继电器切换负载阻值。为实时监控系统的工作状态,通过数据采集器对系统的工作电压和工作电流进行实时采集,当电压或者电流超标时,及时进行错误处理,以保证系统的安全稳定性[4]。系统配有液晶显示器,可以实时显示系统的基本配置及工作状态。控制器通过通信接口电路,可以与上位机进行实时通信。上位机可以对系统的工作模式和参数进行配置,同时存储相应的工作报表等。上位机具有自动验证模式,可以根据配置对不同频率、不同母线电压、不同负载电阻情况下驱动器的工作状态进行自动验证,并存储验证结果,从而提高验证效率。
3 硬件电路设计
3.1 控制器最小系统设计
在高压大电流绝缘栅驱动器应用验证系统中,需要产生高速的PWM 脉冲[5],控制绝缘栅驱动器,因此选用ST 公司的STM32F407 嵌入式处理器。该处理器具有多路硬件PWM 控制器,可以通过硬件方式产生PWM 脉冲,速度快,稳定性较高。另外,STM32F407 处理器具有一定的抗干扰性能,能够稳定工作在复杂的应用环境中。
STM32F407 嵌入式处理器内置高速AD 转换器,在高压大电流绝缘栅驱动器验证平台中可以用于数据采集,主要采集母线电压和负载电流信息,以便在系统过压和过流时及时采取保护措施,提高系统的稳定性。该嵌入式处理器还内置CAN 控制器,可以用于搭建通信接口电路,使得下位机系统可以稳定地与上位机建立通信。CAN 总线的物理层芯片选用TI 公司的 SN65HVD251,该芯片兼容 ISO 11898 标准,通信速率可达到1Mbps,端口的ESD 防护电压大于9kV。STM32F407 嵌入式处理器内置独立看门狗单元,可以有效地提高系统的抗干扰性能。
3.2 显示电路设计
在平台设计过程中,显示电路主要用于系统的工作状态监视,以及当前配置的显示等,使得系统具有良好的人机交互性能。显示器选用12864 液晶显示器,显示器的电压等级选用3.3V,以便兼容STM32F407 处理器的IO 电平范围。选用内置字库的12864 液晶显示器,可以较为方便地显示汉字信息。液晶显示电路的电路图如图2所示,其中RB0~RB7 为数据端,主要用于读写寄存器时的数据操作。E 为使能控制端,RW 为读写操作选择端,BLK 和BLA 为背光调节端。
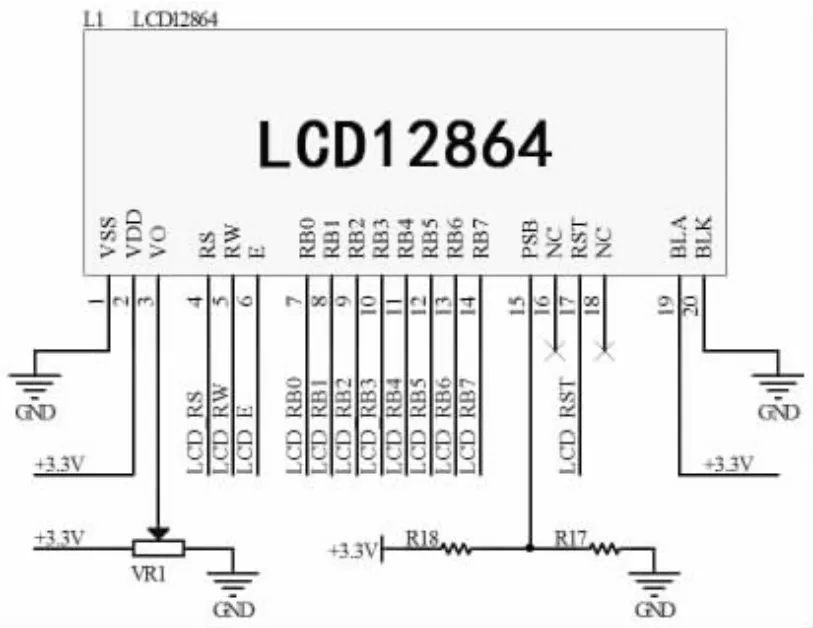
图2 显示电路原理图
3.3 死区电路设计
绝缘栅驱动器通常用于半桥、全桥或三相桥系统中,因此绝缘栅驱动器的控制信号通常为带有死区的互补PWM 信号。为保证死区信号的稳定性,设计硬件死区电路[6]。死区电路的原理图如图3所示,输入信号经过施密特触发器和阻容二极管网络后,在电路的输出端产生带有死区时间的、互补的OUTA 和OUTB 信号,该两路信号可以控制绝缘栅驱动器进行工作。通过调节阻容网络中的电阻值或电容值,可调节电容的充放电时间,进而调节OUTA和 OUTB 之间的死区时间[7]。OUTA 和 OUTB 的仿真结果如图4所示。该硬件死区电路结构简单,死区时间调节方便,具有较好的稳定性。
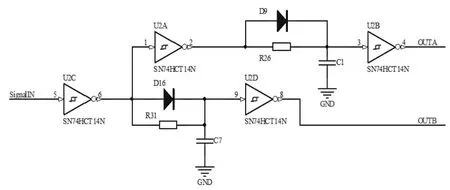
图3 死区电路原理图

图4 死区电路仿真结果图
3.4 负载驱动电路设计
系统搭建的全桥驱动电路如图5所示,它通过四个大功率MOSFET 搭建全桥驱动电路[8]。电路中MOSFET 的栅极分别接有二极管和阻值较小的电阻。电阻可以在MOSFET 开启的瞬间起到限流的作用,其阻值不宜太大,否则会影响系统的工作速度;合理设计二极管则可有效减少整个电路的噪声[9]。通常通过阻性负载来验证绝缘栅驱动器在高压大电流情况下的工作情况,因此,电路中的VS1 和VS2可接外部负载电阻,根据负载电阻的不同,可以验证不同负载电流下驱动器的工作情况[10]。R5 和R6 为采样电阻,可以实时采集桥路的工作电流,当系统的工作电流超标时,控制器可以迅速切断系统动力电源,以保证整个系统的稳定性。

图5 全桥电路原理图
4 系统软件设计
系统的软件设计分为上位机软件设计和下位机软件设计。上位机软件流程图如图6所示,下位机软件流程图如图7所示。

图6 上位机软件流程图

图7 下位机软件流程图
上位机软件工作后,首先读取软件配置,如果验证开始按钮触发,则将配置信息发送给下位机。验证开始后,上位机软件实时读取下位机工作参数,并将工作参数实时显示在上位机界面上。下位机软件工作后,首先读取上位机软件的配置,然后配置相关外设,启动验证后,实时将下位机软件的工作状态反馈给上位机,若验证过程中有错误,则立即结束验证。
5 系统验证
根据以上描述,搭建的高压大电流绝缘栅驱动器验证平台如图8所示。上位机软件的实际工作界面如图9所示。

图8 高压大电流绝缘栅驱动器验证平台实物图
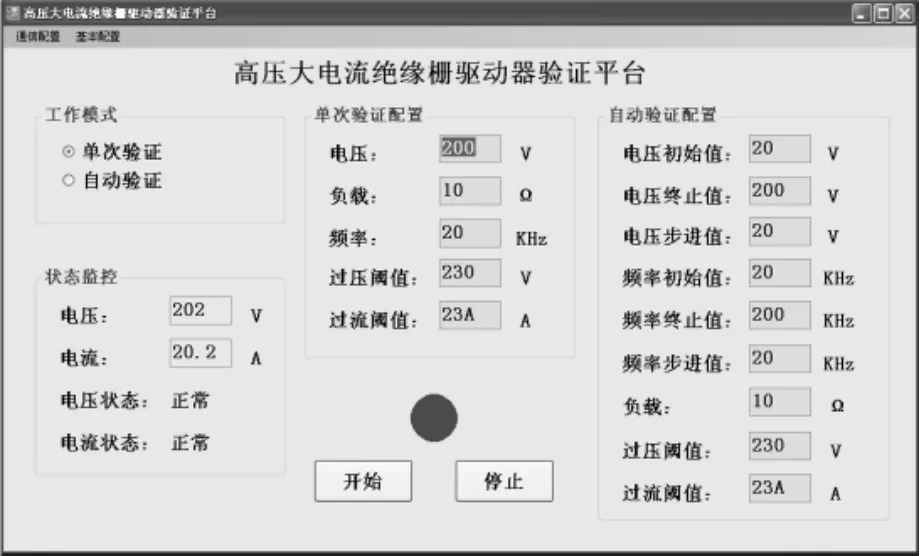
图9 上位机软件界面效果图
当输入信号为互补驱动信号时,绝缘栅驱动器可以产生互补的高压驱动信号,控制后级MOSFET工作,使整个系统工作稳定,满足验证需要。
6 结 束 语
依据高压大电流绝缘栅驱动器的验证需求设计的该款验证平台,可验证不同频率、不同母线电压、不同负载电流情况下绝缘栅驱动器的工作性能。整个系统的上位机/下位机配置构成,支持了自动验证工作模式,根据配置自动完成全参数验证也得以顺利实现。经实际验证,此高压大电流绝缘栅驱动器验证平台效率较高,工作稳定,有很高的实用价值。
