高动态条件下舰船目标SAR成像算法研究
2019-11-05闫海鹏张剑琦师亚辉张振华
曹 晔,闫海鹏,张剑琦,师亚辉,张振华
高动态条件下舰船目标SAR成像算法研究
曹 晔,闫海鹏,张剑琦,师亚辉,张振华
(北京遥测技术研究所 北京 100076)
雷达在高动态条件下对舰船目标进行成像具有雷达运动轨迹非匀直和舰船目标非合作的特点,造成成像质量下降,增加成像算法复杂度。通过建立在匀加速运动状态下对移动目标SAR成像的回波模型,针对舰船目标成像模糊问题,提出采用分数阶傅里叶变换估计目标多普勒参数和基于惯导数据的实时运动补偿相结合的方法。仿真结果表明,算法对舰船运动速度的估计准确,在斜视角70°情况下,仍能够得到好的成像效果。
匀加速运动;分数阶傅里叶变换;平动补偿;大斜视
引 言
当代海上战场的舰船是其重要组成部分,针对舰船目标的高分辨成像对海防具有重要意义。随着SAR(Synthetic Aperture Radar)成像技术的发展,其应用不再局限于星载、机载等匀速运动平台对静止场景以及舰船等移动目标的成像,非匀直轨道状态下对舰船目标的高分辨成像技术需求迫切,因此,需要研究雷达在高动态条件下对移动舰船目标的高分辨成像技术。
针对高动态运动平台其运动轨迹非匀直的特点,目前公开的文献中相关的处理方法大致可以分为四类,包括实时运动补偿、基于非均匀采样的数据重构、非均匀傅里叶变换以及利用惯导系统补偿结合自聚焦的方法[1,2]。文献[3,4]介绍了实时运动补偿方法,将雷达运动轨迹偏离理想匀速直线运动的部分作为运动误差,通过多普勒参数估计对运动误差进行补偿,这类方法的缺点是仅适用于雷达平台沿飞行方向速度变化小的情况。文献[5,6]介绍了基于非均匀采样的成像方法,采用内插阵列将实际空间非均匀位置的方位回波通过数据重构得到等效匀速直线飞行时空间均匀采样位置的回波,通过理想匀速直线运动时的算法进行成像处理,这类方法无需改变后续成像算法,缺点是计算量庞大。文献[7,8]介绍了基于非均匀傅里叶变换的成像方法,由于雷达的变速运动,回波数据在方位向的空间非均匀采样可以等效为匀速运动中非等间隔时间的采样,通过傅里叶变换积分变换到均匀采样的方位频率域完成后续成像处理,这类方法适用于雷达平台沿飞行方向速度变化大的情况,缺点是不能采用快速傅里叶变换,实时性欠佳。文献[9,10]通过分析惯导误差,指出在短时间内惯导的精度很高,能够满足SAR对运动补偿精度的要求,文献[11]在研究机载SAR成像时提出了惯导补偿结合自聚焦的成像方法,得到了较好的成像结果。
目前针对舰船成像的方法大都是将同一距离门内的散射点回波视为LFM(Linear Frequency Modulation)信号,采用“Clean”方法估计各LFM信号分量的参数[12-14]。LFM信号的参数估计主要分为时域法估计和时频分析两类,前者适用于平稳信号分析,在舰船晃动不大,或者晃动可以忽略的情况下通过多普勒参数估计结合舰船平动速度补偿实现方位聚焦;后者适用于非平稳信号分析,主要包括自适应Chirplet分解[15]、FrFT(Fractional Fourier Transform)[16]、Radon-Wigner变换[17]以及SPWV(Smoothing Pesudo-Wigner-Ville)分布[18]等方法,其中FrFT时频聚集性好且不含交叉项,非常适合LFM信号的检测与估计。此外,文献[19,20]还提出根据方位回波多普勒中心频率的动态变化,选择舰船运动平稳时间段进行ISAR成像的方法,此类方法的缺点是成像积累时间缩短,造成分辨率下降。
上述非匀直轨道成像方法大都用于对静止场景成像,而针对舰船目标的成像方法大都基于雷达平台匀速运动模型。本文针对高动态雷达运动平台对舰船目标成像,建立匀加速运动状态下对移动目标成像的回波信号模型,并分析舰船运动对成像的影响,提出采用FrFT估计目标多普勒参数和基于惯导数据的实时运动补偿相结合的方法,并通过仿真分析证明本文方法的有效性。
1 匀加速运动状态下对移动目标成像回波信号模型

图1 成像几何关系


2 舰船运动对成像的影响分析
舰船的运动包括平动和晃动,在一定情况下,两种运动均会造成成像结果模糊,降低图像质量,下面针对舰船目标分别分析平动和晃动对成像的影响。
2.1 舰船平动速度限制
为保证成像效果不受舰船运动的影响,舰船平动速度需同时满足以下两个限制条件:
①由于舰船的运动会引起回波方位向多普勒频谱的搬移,为避免多普勒模糊,频谱搬移量应小于脉冲重复频率的1/2;
②等效径向速度引起的距离单元徙动应小于该距离单元的1/2。

图2 速度最大值随斜视角的变化曲线

表1 舰船在5级海况下的各维晃动参数
由图2可以看出,随着斜视角的增大,舰船允许的最大平动速度越来越小。本文的主要研究目标为超大型舰船,根据文献[22],其航行速度一般为15m/s~20m/s,远远大于图2中显示的最大允许速度限制。在斜视角为70°的情况下,仅当航速小于0.65m/s时才不会造成成像质量的明显下降,正常航速远大于这个限制速度,直接成像会引起目标方位向散焦,降低成像质量,影响成像结果,因此需要对舰船的平动进行补偿。
2.2 舰船晃动影响

图3 多普勒频率变化

图4 多普勒调频率变化
由图3、图4能够看出,在合成孔径时间内,舰船晃动引起的多普勒频率和调频率变化最大的是桅杆最高点(对应图中“×”线),分别对应1.2Hz和11Hz/s,变化较小。经过上述分析可知,超大型舰船的晃动对成像的影响不大,此时主要影响成像效果的为其平动速度,需加以补偿,因此本文SAR成像算法只考虑目标平动速度的影响。
3 高动态运动平台SAR成像算法
由于高动态平台具有短时间内符合匀加速模型的特点,可以利用匀加速模型对雷达运动轨迹进行建模;此外,对超大型舰船来说,其晃动对成像的影响较小,而沿航向的平动影响较大,需进行估计并补偿,本文采用FrFT估计多普勒参数结合惯导数据的实时运动补偿方法对舰船目标进行成像。
3.1 斜距误差分析
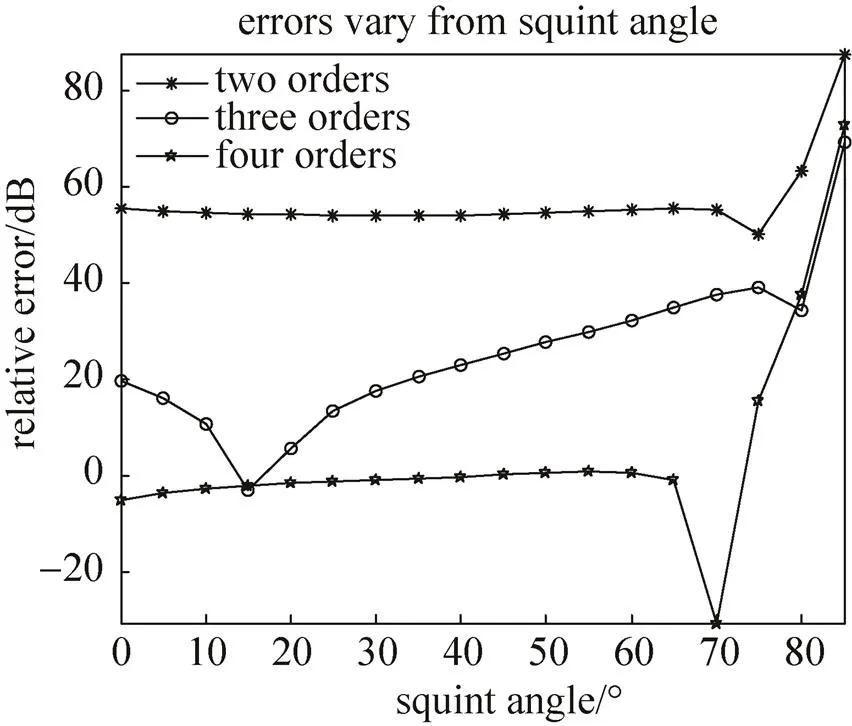
图5 相对误差随斜视角的变化曲线

3.2 基于惯导的距离徙动校正

3.3 基于FrFT的舰船平动速度估计



图6 多普勒调频率变化曲线
3.4 二次距离徙动校正

3.5 相位滤波
雷达平台的加速运动引入方位频率的高次项,使得调频率随方位位置变化,影响方位聚焦,下面通过构造相位滤波函数,去除a的三次项、四次项。


将上式与RD(Range-Doppler)域回波信号相乘后再转换到两维时域,令回波相位中的高次项与方位位置无关,即对应系数为0,从而消除多普勒调频率的一阶和二阶方位空变,由此可以得到
3.6 方位向Dechirp处理
经过相位滤波处理后,关于方位慢时间的各项系数是非方位空变的,可以统一补偿。方位Dechirp函数如下。

上式2、3、4为相应常量表达式。将上述处理后的回波信号变换到RD域,可以得到聚焦良好的目标图像。算法流程如图7所示。
4 仿真及成像效果分析
4.1 加速度模型算法仿真
根据文献[22]公开的相关参数,对舰船目标进行强散射点建模,令舰船长度为300m,宽度70m,最大桅杆高度66m,各散射点间隔7m,仿真结果如图8所示。

图7 算法流程

图8 舰船目标模型
下面对本文算法进行仿真,参考文献[1]选取雷达高速运动时的一组典型运动参数,为分析本文算法在大斜视角情况下的成像效果,空间斜视角选择70°,由于脉冲积累时间较短,同时考虑方位分辨率要优于5m,脉冲积累时间选择0.8s,舰船平动速度根据其速度范围随机选定(令舰船静止时,船头朝向图1中X轴正方向),舰船晃动参数见表1,具体仿真参数见表2。

表2 仿真参数
图9仿真了采用匀速运动模型进行回波处理的成像结果,图10仿真了利用相同回波,采用匀加速运动模型直接对舰船目标成像的结果(未补偿舰船平动速度)。
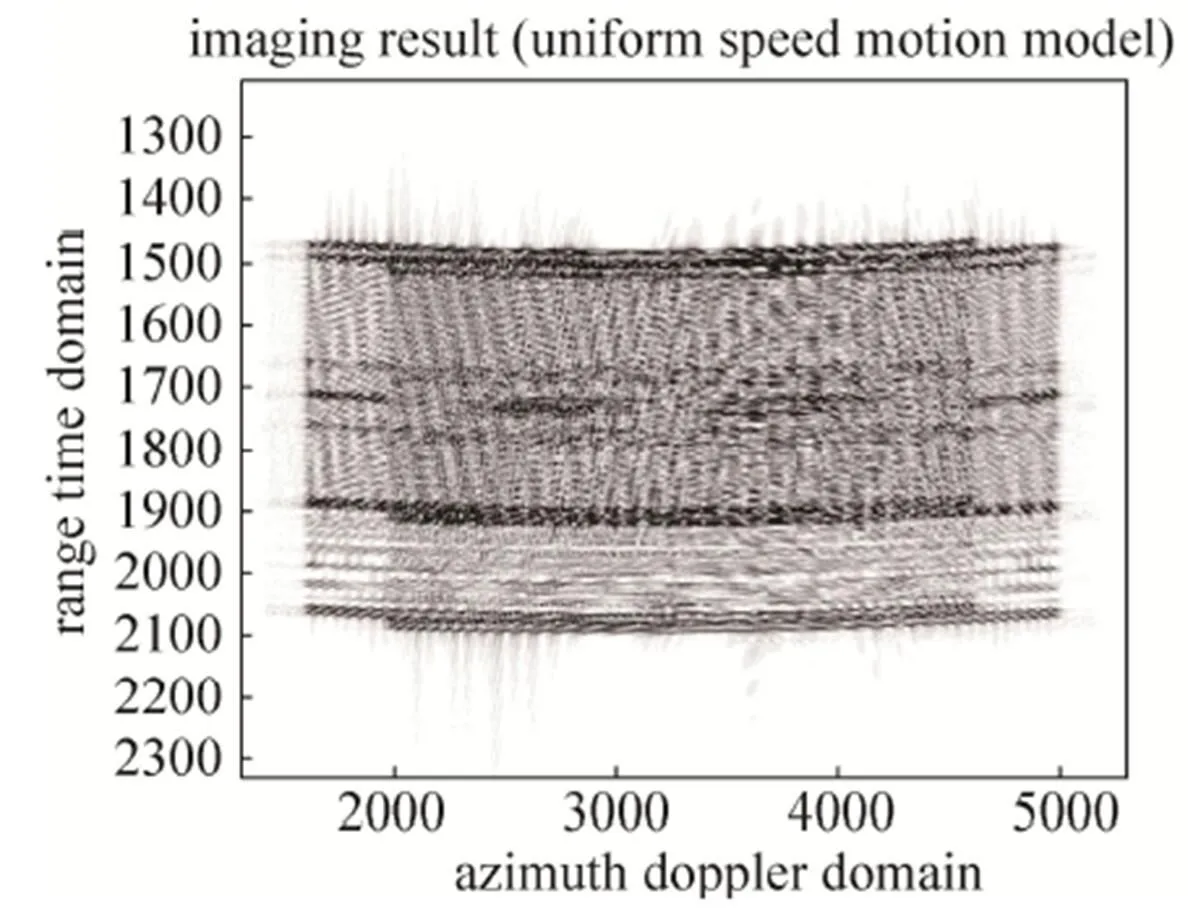
图9 匀速运动模型成像结果
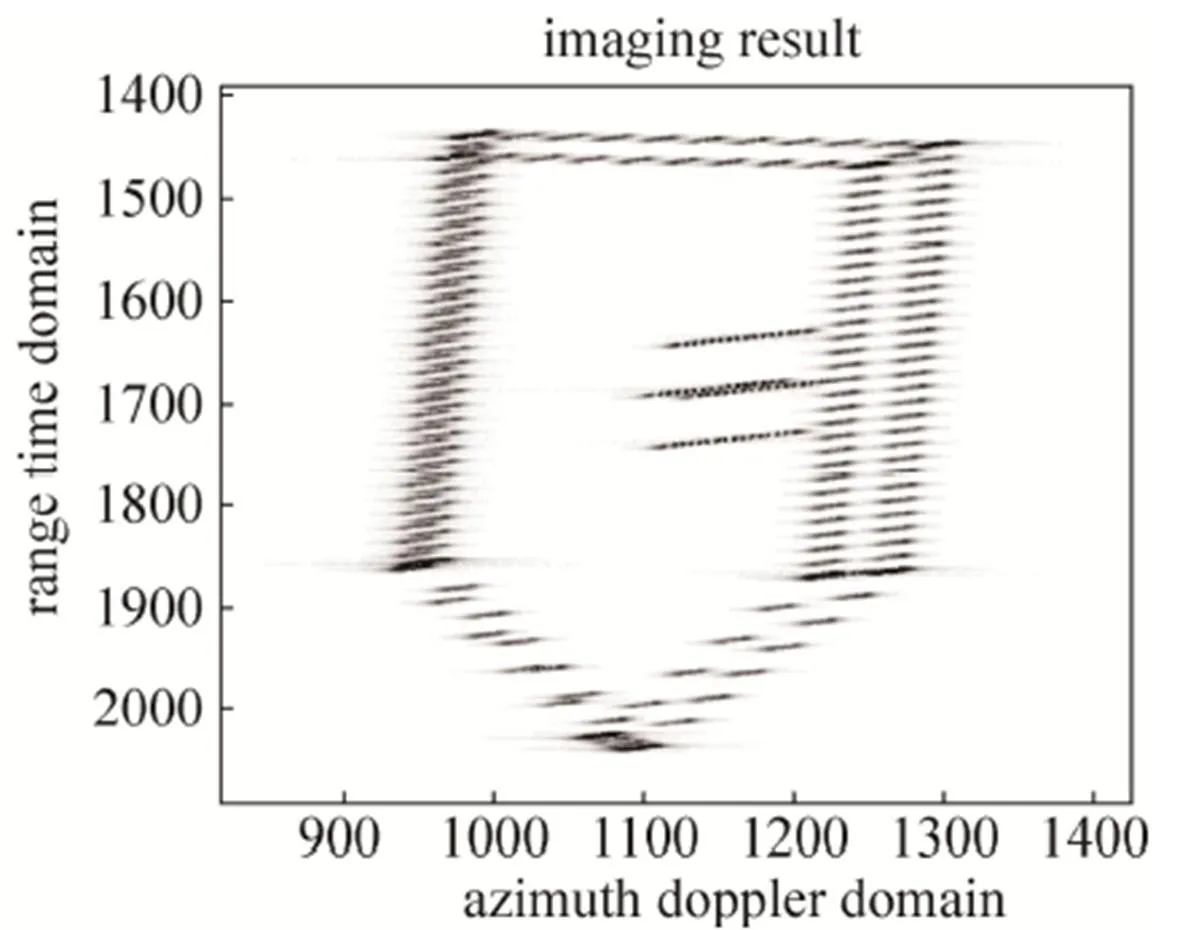
图10 匀加速运动模型成像结果
由图9能够看出,雷达平台偏离理想匀速直线运动的部分会造成目标严重散焦,以致不能成像;由图10能够看出,在正确补偿了雷达平台的运动后,舰船目标的运动也会造成图像散焦,降低了图像质量,因此需要对舰船运动速度进行估计并补偿。
图11为采用FrFT估计多普勒参数的结果,可以看出,舰船目标的方位回波信号在适当的分数阶域具有良好的时频聚集性,峰值处尖锐,且没有交叉耦合项的干扰。
改变舰船平动速度,其它条件不变,利用相关函数法、MD法以及FrFT法分别计算舰船等效径向速度与等效方位向速度时的估计结果与误差情况见表3,可以看出,FrFT法估计精度更高,等效径向速度估计误差小于0.1m/s,等效方位向速度估计误差小于1m/s。
下面按照本文所提算法,仿真匀加速状态下对舰船目标进行成像,成像结果如图12所示,图12(a)、图12(b)分别对应舰船静止、舰船仅存在晃动时的成像结果,图12(c)对应舰船同时存在平动和晃动情况下,通过FrFT算法对舰船进行平动补偿后的仿真结果。

图11 FrFT结果
对比图12(a)、图12(b)能够看出,五级海情下,超大型舰船晃动对成像影响不大,桅杆及船周各散射点依旧清晰可辨,与舰船静止时的情况相比,成像效果没有明显降低。由图12(c)可知,本文所提算法对运动的舰船目标可以很好地补偿其平动造成的散焦,成像效果改善显著。仿真结果验证了本文模型和算法的有效性。

表3 舰船速度估计

图12 匀加速状态下的成像结果
4.2 成像效果分析
对本文所提算法的成像效果进行分析,以峰值点下降3dB对应的距离为分辨率,下面以目标静止情况为例,图13(a)为目标某边缘点的两维幅度谱,为提高图像分辨率计算的准确性,图13(b)为对图13(a)峰值点附近进行局部插值的结果,选取4个边缘点和1个中心点来分析,分辨率结果见表4(R表示距离向,A表示方位向)。
由表4可以看出,在70°的大斜视角情况下,本文提出的算法成像效果较好,距离向分辨率均小于1.4m,方位向分辨率基本达到5m以内,解决了加速度模型下舰船平动引起的SAR成像散焦问题。
5 结束语
本文针对高动态雷达运动平台对舰船目标成像散焦问题,建立了匀加速运动状态下对移动目标成像的回波模型,提出了采用FrFT估计目标多普勒参数和基于惯导数据的实时运动补偿相结合的方法,通过二次距离徙动校正,将运动平台对运动目标成像的问题转化为运动平台对静止目标成像的问题,简化了成像流程。仿真结果表明:本文所提算法能够实现高动态条件下对移动舰船目标的高分辨成像,方位向分辨率优于5m,验证了本文算法的有效性。此外,本文通过分析忽略了舰船晃动的影响,但在更高海情或对小型舰船进行成像的情况下,舰船晃动剧烈,此时晃动的影响不能忽略,需要依靠瞬时成像等其他成像方法,这是接下来需要研究和改进的地方。
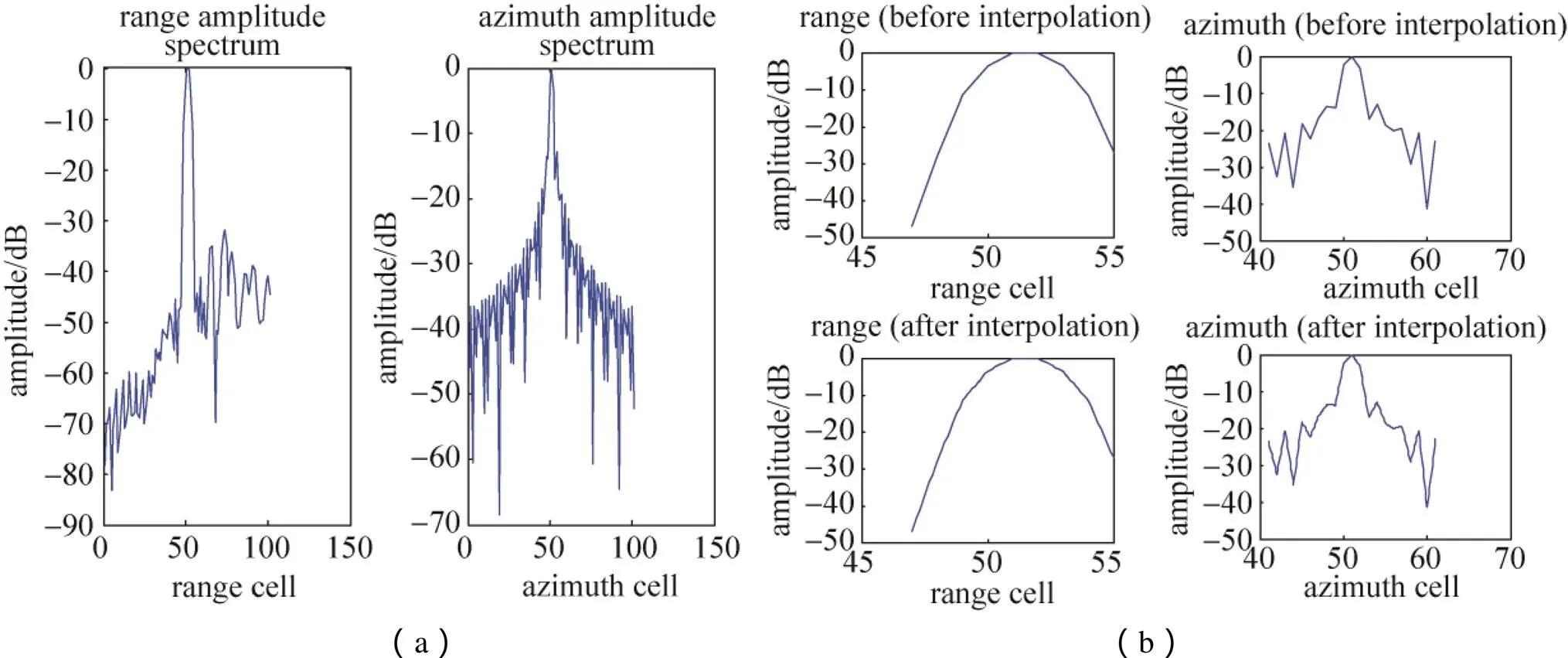
图13 两维幅度谱

表4 分辨率结果
[1] 彭岁阳. 弹载合成孔径雷达成像关键技术研究[D]. 长沙: 国防科学技术大学, 2011. PENG Suiyang. Research on key technologies of missile-borne synthetic aperture radar imaging[D]. Changsha: National University of Defense Technology, 2011.
[2] 陈勇, 赵惠昌, 陈思, 等. 弹载合成孔径雷达成像处理算法综述[J]. 探测与控制学报, 2015, 37(6): 1–6. CHEN Yong, ZHAO Huichang, CHEN Si, et al. Review on missile-borne SAR imaging algorithm[J]. Journal of Detection & Control, 2015, 37(6): 1–6.
[3] 周峰, 王琪, 邢孟道, 等. 一种机载大斜视SAR运动补偿方法[J]. 电子学报, 2007, 35(3): 463–468. ZHOU Feng, WAN Qi, XING Mengdao, et al. Novel method of motion compensation for airborne high squint synthetic aperture radar[J]. Acta Electronica Sinica, 2007, 35(3): 463–468.
[4] 李燕平, 邢孟道, 保铮. 斜视SAR运动补偿研究[J]. 电子与信息学报, 2007, 29(6): 1421–1424. LI Yanping, XING Mengdao, BAO Zheng. Study of motion compensation for squinted-looking SAR[J]. Journal of Electronic & Information Technology, 2007, 29(6): 1421–1424.
[5] 杨凤凤, 王敏, 梁甸农. 基于非均匀采样的小卫星多通道SAR无模糊成像[J]. 电子学报, 2007, 35(9): 1754–1756. YANG Fengfeng, WANG Min, LIANG Diannon. Small satellite muti-channel SAR unambiguous imaging based on nonuniform sampling[J]. Acta Electronica Sinica, 2007, 35(9): 1754–1756.
[6] 彭岁阳, 胡卫东. 基于内插阵列变换的变速SAR成像算法[J]. 信号处理, 2009, 25(11): 1742–1747. PENG Suiyang, HU Weidong. A imaging algorithm for shift-velocity SAR based on interpolated array transform[J]. Signal Processing of China, 2009, 25(11): 1742–1747.
[7] 井伟, 张磊, 邢孟道, 等. 非匀速平台SAR成像算法研究[J]. 西安电子科技大学学报, 2008, 35(4): 605–608. JING Wei, ZHANG Lei, XING Mengdao, et al. Novel algorithm for the processing of non-uniform motion SAR data[J]. Journal of Xidian University(Nature Science), 2008, 35(4): 605–608.
[8] PENG S Y, ZHANG J, QU Q, et al. The imaging analysis of asynchronous bistatic SAR with parallel tracks[C]. 2010 International Conference on on Image Analysis and Signal Process, Xiamen, 2010: 16–21.
[9] 李刚, 鲜勇. 纯惯导中制导误差分析[J]. 飞行力学, 2007, 25(2): 50–52. LI Gang, XIAN Yong. Analysis on error of midcourse guidance based on inertial navigation[J]. Flight Dynamics, 2007, 25(2): 50–52.
[10] 曹福祥, 保铮, 袁建平, 等. 用于SAR运动补偿的DGPS/SINS组合系统研究[J]. 宇航学报, 2001, 22(2): 121–124. CAO Fuxiang, BAO Zheng, YUAN Jianping, et al. DGPS/SINS integrated system used in AR motion compensation[J]. Acta Aeronautica ET Astronautica Sinica, 2001, 22(2): 121–124.
[11] 郑卫平. 机载SAR运动误差分析与补偿方法研究[D]. 北京: 中国科学院电子学研究所, 2006. ZHENG Weiping. Motion error analysis and compensation method research on airborne SAR[D]. Beijing: Institute of Electrics, Chinese Academy of Sciences, 2006.
[12] CHEN C, ANDREWS H C. Target-motion-induced radar imaging[C]. IEEE Trans. on AES, 1980, 16(1): 2–14.
[13] 邢孟道, 保铮. 外场实测数据的舰船目标ISAR成像[J]. 电子与信息学报, 2001, 23(12): 1271–1277. XING Mengdao, BAO Zheng. ISAR ship imaging of real data[J]. Journal of Electronic & Information Technology, 2001, 23(12): 1271–1277.
[14] 胡光丽. 大斜视高海情下舰船目标成像算法研究[D].北京: 北京理工大学, 2016. HU Guangli. Research on imaging algorithms of ship targets in large squint mode and atrocious sea condition[D]. Beijing: Beijing Institute of Technology, 2016.
[15] 王勇, 姜义成. 基于自适应chirplet分解的舰船目标ISAR成像[J]. 电子与信息学报, 2006, 28(6): 982–984. WANG Yong, JIANG Yicheng. The ISAR imaging of ship based on adaptive chirplet decomposition[J]. Journal of Electronic & Information Technology, 2006, 28(6): 982–984.
[16] 陶然, 周云松. 基于分数阶傅里叶变换的宽带LFM信号波达方向估计新算法[J]. 北京理工大学学报, 2005, 25(10): 895–899.TAO Ran, ZHOU Yunsong. A novel method for the direction of arrival estimation of wideband linear frequency modulated sources based on fractional fourier transform[J]. Transactions of Beijing Institute of Technology, 2005, 25(10): 895–899.
[17] 冉鑫, 马世伟, 曹家麟. 基于Radon-Wigner变换的多分量LFM信号的检测[J]. 上海大学学报, 2001, 7(2): 119–122. RAN Xin, MA Shiwei, CAO Jialin. Analysis of multi-component LFM signal based on Radon Wigner transform[J]. Journal of Shanghai University(Nature Science), 2001, 7(2): 119–122.
[18] 杨传安, 齐向阳, 李宁. 一种基于参数估计的运动舰船SAR成像方法[J]. 国外电子测量技术, 2017, 36(5): 29–36. YANG Chuanan, QI Xiangyang, LI Ning. A method for moving ship SAR imaging based on parameter estimation[J]. Foreign Electronic Measurement Technology, 2017, 36(5): 29–36.
[19] 云亚娇, 齐向阳, 李宁. 基于参数估计的海面运动舰船SAR成像方法[J]. 雷达学报, 2016, 5(3): 326–332. YUN Yajiao, QI Xiangyang, LI Ning. Moving ship SAR imaging based on parameter estimation[J]. Journal of Radars, 2016, 5(3): 326–332.
[20] MARTORELLA M, PASTINA D, BERIZZI F, et al. Spaceborne radar imgaing of maritime moving targets with the cosmo-skymed SAR system[J]. IEEE Journal of Selected Topics in Applied Earth Observations & Remote Sensing, 2014, 7(7): 2797–2810.
[21] 邢孟道, 保铮, 王彤, 等. 雷达成像算法进展[M]. 北京: 电子工业出版社, 2014: 147–150.
[22] 解红. 美军出兵海外八大利器一瞥[J]. 环球军事, 2001, Z1: 76–78. XIE Hong. A look at the top 8 weapons of the USA[J]. Global Military, 2001, Z1: 76–78.
[23] WHENER D.R. High resolution radar[J]. Boston: Artech House, 1995: 1–6.
[24] 赵兴浩, 邓兵, 陶然. 分数阶傅里叶变换数值计算中的量纲归一化[J]. 北京理工大学学报, 2005, 25(4): 360–364. ZHAO Xinghao, DENG Bing, TAO Ran. Dimensional normalization in the digital computation of the fractional fourier transform[J]. Transactions of Beijing Institute of Technology, 2005, 25(4): 360–364.
[25] 董永强, 陶然, 周思永, 等. 含未知参数的多分量Chirp信号的分数阶傅里叶分析[J]. 北京理工大学学报, 1999, 19(5): 612–615. DONG Yongqiang, TAO Ran, ZHOU Siyong, et al. The fractional fourier analysis of multi-component chirp signals with unknow parameters[J]. Transactions of Beijing Institute of Technology, 1999, 19(5): 612–615.
Research on ship target SAR imaging algorithm under high dynamic condition
CAO Ye, YAN Haipeng, ZHANG Jianqi, SHI Yahui, ZHANG Zhenhua
(Beijing Research Institute of Telemetry, Beijing 100076, China)
The features of radar motion trajectory with non-uniform speed and non-straight line and ship target with non-cooperative motion when radar images ship target under high dynamic condition result in poor image quality and increase the complexity of imaging algorithm. The echo of radar imaging moving ship target under uniform acceleration linear motion is modeled. A method of combining target Doppler parameters estimation based on Fractional Fourier Transform and real-time motion compensation based on INS data is proposed. The simulation results show that the proposed algorithm can estimate speed of ship target accurately and obtain fine imaging result under squint angle 70.
Uniform acceleration; Fractional fourier transform; Translation compensation; Large squint
TN958
A
CN11-1780(2019)04-0040-09
曹 晔 1994年生,硕士在读,主要研究方向为雷达信号处理。
闫海鹏 1988年生,硕士,主要研究方向为雷达信号处理。
张剑琦 1985年生,高级工程师,主要研究方向为雷达总体技术。
师亚辉 1977年生,研究员,主要研究方向为SAR信号处理算法及系统设计仿真。
张振华 1977年生,研究员,主要研究方向为雷达总体技术、SAR成像技术。
Email:ycyk704@163.com TEL:010-68382327 010-68382557
2019-03-13
2019-06-04
