飞机蒙皮机器人化制造曲面分片算法研究
2019-11-04王乾杰赵兴炜
王乾杰 赵兴炜 陶 波*
(华中科技大学数字制造装备与技术国家重点实验室,武汉430074)
0 引言
随着机器人自动化加工的逐渐普及,自动化打磨与自动化喷涂技术已广泛应用于汽车及家具加工等工业领域,且相较传统的手动加工,机器人自动化加工表现出了良好的加工精度和极高的加工效率。飞机加工领域对比汽车与家电加工行业有着更高的精度要求,为保障飞机飞行时的安全性,加工厚度与一致性必须满足设计需要,因此将机器人自动化加工引入飞机加工领域势在必行。
洛克希德·马丁公司针对F-35战机开发机器人飞机精整系统,实现对尾翼和小零件的自动喷涂,涂层厚度变化范围较手工喷涂提升80%[1];国内清华大学[2]就飞机涂装自动喷涂技术进行解析和系统设计,喷涂误差在10%范围以内;中国民航大学[3]针对飞机维护设计的涂层打磨系统,对飞机大机翼打磨的人力需求从6人降低至2人,极大地提升了加工效率。
一方面,大型飞机构件可以根据其实际功能分解为多个功能结构,经人工分割后分别进行加工。另一方面,大型飞机构件属于大型复杂构件,需分解为多个功能结构,分别进行加工。传统加工方式采用手动分片,在规划加工轨迹的过程中便已完成各功能区域划分[4],或是根据机械臂可达范围对模型进行分片处理[2-3]。文献[5-7]在规划轨迹前对工件三角网格模型进行分片处理,对每一个分片区域分别进行轨迹规划,实现分操作的自动运行,拓展了机器人自动化加工的涵盖范围,但从实现角度来看依然存有一些问题:(1)分片结果不能保证任意两三角面片间法向矢量偏角或近似曲率小于设定阈值,而这正是保证加工质量的关键所在;(2)分片结果面积小数量多,极为琐碎,不利于加工效率的提升。随后文献[8]提出基于分水岭法的曲面分片方式,寻找并连接曲率发生突变的特征点形成曲面分片边界;文献[9-10]提出结合区域增长法的曲面分片方式,连接起点邻接具有相同曲面特征的面片形成加工分片。文献介绍方法可以一定程度上增大分片结果的面积,减少加工轨迹规划的次数,同时让每一个区域具有相同的曲率特征,但依然无法从数字上保证区域中的偏角和曲率小于阈值。文献[11]采用区域增长法,以三角面片法向矢量偏角为依据进行加工区域划分,保证分片区域的最大偏角小于偏角阈值。但文献针对复杂曲面喷涂加工,仅考虑偏角对加工质量的影响,不便于在打磨加工轨迹规划中使用,仍具有提升空间。
本文将根据表面加工的工艺模型对加工时的厚度及力学信息进行分析,提出以三角网格模型近似曲率为判据的曲面分片方法,提升分片区域加工性能。该方法可以生产相对比较平滑的曲面,有利于后期机器人加工轨迹的生成。并在Visual Studio 2017平台编写算法实现代码,验证大型飞机构件分片算法的效率和可靠性。
1 分片判据阈值的计算
大型飞机曲面加工,无论是涂层喷涂或是表面打磨,因其复杂的表面特征,都需进行曲面分片操作。引言中介绍了几种曲面加工分片方法,但都或多或少的存在不足,需对喷涂加工与打磨加工模型进行分析,获得贴合加工模型的分片判断依据。
通过分别分析曲面喷涂加工与曲面打磨加工的厚度模型与加工力学模型,分析曲面分片划分区域应满足的曲面特征,从而实现对大型飞机曲面分片阈值判据的推导与计算。
文献[12]根据赫兹接触理论,推导复杂曲面砂轮打磨的力学模型,得到截面线的压强分布函数:
如图1所示,其中P0为打磨区域最大压强,R为压力分布区域求解数据:
其中,R1、R2分别为砂轮变形后中心点曲率半径和工件接触中心点曲率半径,d为压痕深度。
为保证分片后划分范围内加工质量,加工区域的压强分布应尽量均匀,至少不能出现砂轮边界脱离工件表面的情况。若无脱离情况,则可认为R1=R2,则可设定参数 δ(0<δ<1),令压强最小点P( Lc/2)≥δP0,其中Lc为磨削接触宽度,可以求得加工区域的最大曲率限制为:

本文使用飞机三角网格模型,数据格式为一系列三角形片体构成,保存三角面片的三个顶点坐标和法向矢量坐标。在计算近似曲率的过程中,计算两三角面片的法向矢量偏角θ及质心间距l,近似认为质心间距为一段曲率圆弧长,偏角为圆弧对应的圆心角。由此可计算得到曲率圆弧的半径:

由此计算得到近似曲率计算方法:

在近似过程中将两三角面片质心间距视为曲率圆的一段圆弧,则作为对比的这两个三角面片必须足够接近,则在使用判据过程中,对比的三角面片应为相邻两三角面片。

图1 接触面压强分布
文献[13]分析喷涂加工的涂层厚度累积模型,令Qmin、Qd、Qmax分别为最小、平均、最大漆膜厚度,Qs为任意位置s漆膜厚度,αth为该位置曲面法向矢量与与之相切平面法向矢量之间的偏角,则任意点s漆膜厚度应满足式(7):
若令ΔQd为涂层厚度最大允许偏差,则对喷涂区域整体喷涂厚度应满足:

在计算近似曲率阈值的过程中,将质心间距l默认为1,使近似曲率数值阈值上与法向矢量偏角相等。
2 曲面分片及优化原理
2.1 基于区域增长法的曲面分片实现
本文对大型飞机模型进行曲面分片基于区域增长法,根据后续加工工艺的不同(曲面打磨或曲面喷涂)分别选取曲面分片判据,对模型进行处理。
获得飞机三角网格模型数据,将模型数据记录为一组三角面片集:

其中,Tri表示三角网格模型中的第i个三角面片,模型中三角面片总数为n。每个三角面片Tri数据中包含面片的三个顶点坐标 {},以及面片的法向矢量若进行打磨操作的曲面分片,则加上面片的质心坐标获取后续加工工艺参数,根据式(6)和式(9)计算得到曲面分片判断阈值κappro或 αth。

图2 曲面分片流程图
分片操作开始后,以三角网格模型中的随机三角面片Tri为起点,搜索与之相邻的三角面片Trj,计算两相邻三角面片法向矢量偏角γ,若偏角γ满足曲面分片判据,即 γ/l<κappro或是 γ<αth,则将三角面片Trj与三角面片Tri相连形成组合面片Scb,并更新组合面片边界三角面片Trbnd。随后搜索与边界三角面片相邻的三角面片,并对相邻两个三角面片的偏角进行计算与分片判据进行对比,将满足者连接入组合面片。重复此类操作,直至组合面片Scb中所有边界三角面片均不存在满足分片判断的相邻三角面片,则将组合面片Scb视为一个三角面片几何并输出为三角网格模型,模型所描述便是一个曲面分片结果。随后再以任意零散三角面片为起点,重复上述操作,完成下一个分片区域的划分和储存,直至三角网格模型S中所有的三角面片均不存在满足分片判据的邻接三角面片,如图2所示。
2.2 对分片区域近似平面化
在简单根据第1节介绍的判据对模型进行分片操作过程中,由于判据针对对象为三角网格模型中的邻接三角形,分片结果可能不能直接使用于机械臂自动化加工。在对飞机模型进行分片的过程中,飞机的机身可近似视为一个圆柱,在曲面分片过程中可能会被完整提取出来如图3所示,对比后续加工中机械臂的可达范围,机身曲面的面积过大且不具备近似平面性的特征,需在后续进行优化。
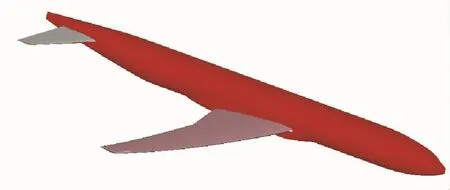
图3 未优化分片效果
为使分片结果可近似为平面,需对上文中的分片结果进行优化处理。将每个代表分片区域的组合面片Scb定义为一个三角面片集:

定义中各参数含义于式(10)中相同。从三角面片集Scb中边界三角面片为起点,构件优化面片Sfin,具体操作如下:
1)设定近似平面化区域最大偏角θmax,表示在分片结果优化过程中可以允许的优化结果区域中最大的法向矢量偏角。
2)计算优化面片Sfin的面积平均法向矢量normavg:

其中,n为优化面片中成员三角面片的数量,Ai和normi分别为第i个成员三角面片的面积和法向矢量。初始优化面片中仅有起点三角面片,平均法矢即三角面片法矢。
3)搜索与优化面片中边界三角面片邻接的三角面片,并计算三角面片法向矢量与优化面片平均矢量的偏角γ,若γ<θmax,将三角面片连接进入优化面片,并更新优化面片的平均法向矢量。
4)重复上述操作,直至优化面片中边界三角面片不存在与之相邻且满足角度阈值限制的三角面片,则优化面片构建完成,保存优化面片集合,完成一组曲面分片优化结构。
5)重复上述操作,直至组合面片中所有的三角面片均加入优化面片,且所有优化面片构建完成,则曲面区域近似平面化优化完成。
近似平面化处理后的模型表面将所有的法向矢量偏角限制在了最大偏角θmax以内,符合近似平面化的思想,更便于机器人自动化加工的实现。
2.3 小型区域与狭长区域的识别与剔除
随着分片的进行,组合面片或优化面片可能出现包含三角面片数量极少便构造完成的情况。此类特征区域对应曲面模型中曲率较大的区域,不满足保证加工质量的曲面几何限制,在实际加工中不适用于机器人自动加工,或者不适用于作为参数输入的表面加工工艺及工具。仅对曲面分片算法辅助的表面加工规划,为保证加工表面厚度均匀性及维持自动化加工的高效性,不宜对此类特征区域进行加工,需进行识别与剔除。
完成近似平面化的加工区域优化后,计算每个加工区域的面积Afin,并计算飞机模型表面积A,设置曲面分片存贮面积最小占比ε,若加工区域面积与飞机模型面积的比值小于ε,即Afin<ε·A,则将该区域从分片结果中剔除,在后续加工中有工人手工加工或更换加工参数对此区域进行规划。
3 算法验证
大型飞机曲面分片算法的验证采用式(9)描述的曲面喷涂加工的角度阈值判据对飞机模型进行曲面分割,飞机模型下载自网络,如图4所示。

图4 飞机模型
程序代码运行于Windows 10操作系统,Visual Studio 2017平台下使用C++语言编写,结合Open-CasCade库实现算法显示模块实现。程序的开发和运行平台:CPU:Inter®CoreTMi7-7700@3.60GHz,内存:8GB,显卡:3GB。
导入原始模型(*.igs),使用商用软件SOLIDWORKS将模型转换为三角网格模型(*.STL),飞机三角网格中包含18 016个三角面片,模型分片前设置法向矢量阈值αth为0.35rad,近似平面化区域最大偏角θmax为1rad,存贮面积最小占比ε设置为10%,输入飞机三角网格模型,运行曲面分片算法。
分片算法输出三角网格模型置于同一视图中,分片效果图如图5所示,从图中可以看出,飞机曲面分片算法成功将飞机模型划分成为机翼上下表面(3、5)、尾翼上下表面(4、6),以及被拆分为若干近似平面的飞机机身(1、2、7)共计7个区域。所有分片区域均具有近似平面的特性,三角网格模型中显示的锯齿状边界在曲面拟合后可化为平滑边界。


图5 分片算法结果视图
算法验证过程中的模型数据与程序运行内存与时间消耗如表1所示,从表中可以看出,分块整体时间平均在5.82s左右,对比实际模型加工耗时,时间占比小,拥有很高的处理效率;曲面分片算法处理后的曲面模型表面特征均符合喷涂加工的参数需求,便于加工规划,保证了加工厚度的均匀性;算法简单,实现了大型飞机表面加工的全面自动化,提高模型生成效率,从而实现了加工轨迹规划流程整体效率。由此看来,本算法在加工中使用可带来显著的效果。

表1 算法验证参数
4 结论
分析曲面喷涂和曲面打磨的工艺模型,对曲面分片算法的阈值判据进行推导与计算,采用区域增长法对目标模型进行曲面分片,使分片区域拥有一致的表面特征,保证后续加工在分片区域内的均匀性;通过对分片结果进行优化处理,使分片曲面具有近似平面化的特征,符合轨迹规划习惯,且不会过于琐碎,便于对模型进行加工轨迹规划以提升规划效率。最后通过实际模型对算法进行验证,确保算法的可实现性。