基于固定单目摄像头的机器人定位技术
2019-11-03黎安庆唐飞龙施智雄
黎安庆 唐飞龙 施智雄
摘要:高精度定位是机器人完成指定工作的前提,针对机器人在室内未知环境中定位的问题,提出了一基于固定摄像头的室内移动机器人视觉定位的方法。该方法采用一套基于图像采集模块的机器人定位测试平台,测量系统将机器人在场地内的位置信息通过摄像头采集到之后,送入计算机;计算机经过图像处理,生成机器人的坐标及方位角信息。该方法具有结构简单、稳定性好和理论精度高的优点;可同时实现机器人室内坐标和方位角。
关键词:机器人;室内定位;计算机视觉
中图分类号:TP3 文献标识码:A
文章编号:1009-3044(2019)23-0213-02
开放科学(资源服务)标识码(OSID):
机器人定位是机器人通过传感器感知周围信息,并通过运算获取自身位置的过程[1]。现有的室内定位技术有基于惯性传感器的航迹推算法、红外定位技术、无线电定位技术、超声波定位技术等[2-4]。航迹推算定位应用十分广泛,但其弊端在于随时间推移,定位误差会不断增加[5];而基于无线电定位的技术如:uwb 、zigbee、wifi、rfid等以及超声波定位技术都需要在现场建立基站或者信标[6],增加了系统复杂度及工作量,同时由于无线电和超声波极易受到干扰[7],因此其可靠度和稳定性都较低。针对上述问题,本文提出一种基于计算机视觉技术的机器人室内定位方法。
1 系统概述
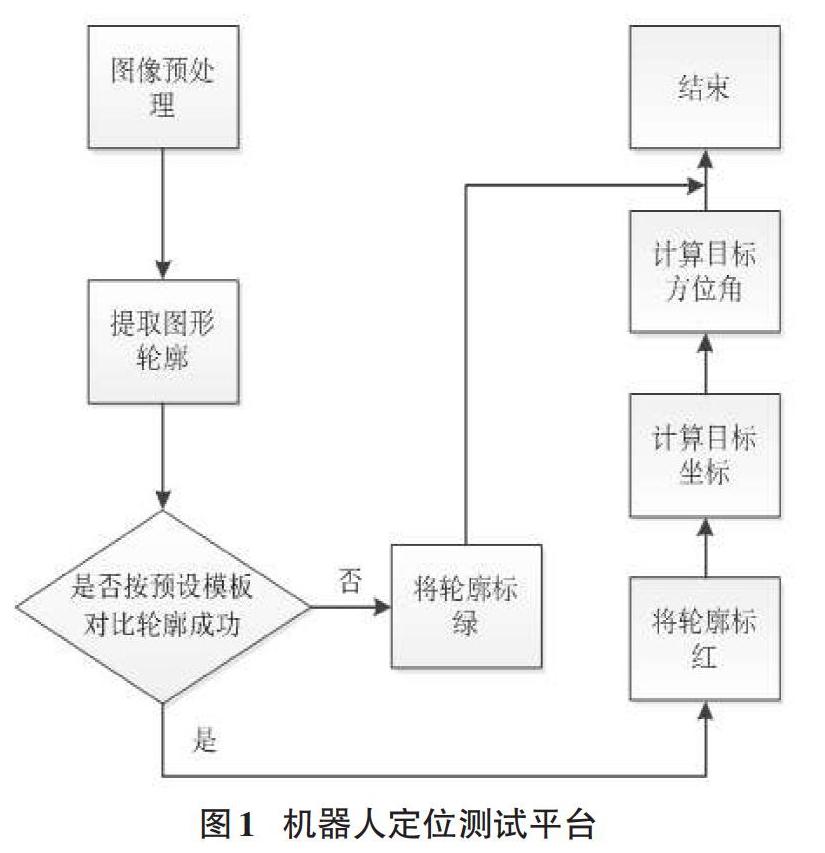
为研究机器视觉定位方法,搭建机器人定位测试平台,如图1所示。
摄像头将机器人在场地内运行的图片采集后送入计算机。计算机经过图像处理、轮廓提取及比对后,根据识别到的机器人目标,生成机器人的坐标及方位角信息。
2 定位步骤及原理
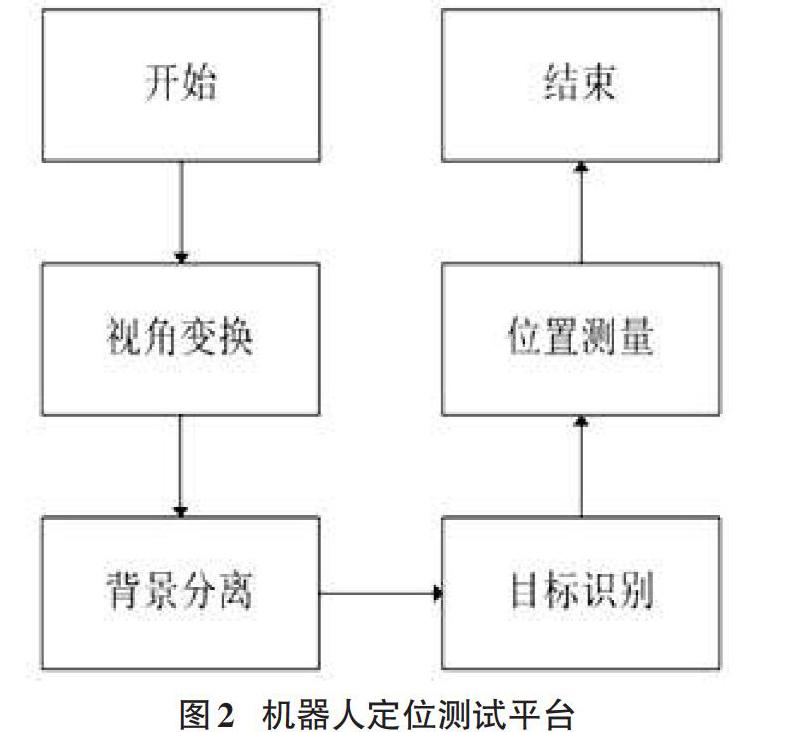
定位过程由计算机完成,具体为视角变换、背景分离、目标识别以及位置测量等步骤,定位步骤如图2所示。
视角变换将摄像头拍摄得到的图像转换为俯视图,背景分离就是去除背景的干扰得到一个或多个可能的目标,目标识别需要在多个目标当中识别出真正的机器人目标。
2.1 视角变换
在任何场地内,摄像头拍摄得到的图像一般不是俯视图。为了测量机器人的位置,以俯视的视角呈现的图像将更加有利于位置测量和方向计算。因此,首先对获取的图像进行视角变换,将其由任意视角转换为俯视视角。转换的方法是将拍摄到的图像利用透视变换方法进行图形几何变换[8]。
2.2 背景分离
在任意一张图片当中,目标对象一定与背景同时存在,所以需要去除背景干扰,本文背景分离采用帧差法,利用相邻两帧图像作差,而在背景严格不变,只有机器人改变位置会造成图像变化的环境下,可先保存一张无机器人在场的图作为背景图片,用该背景图片与机器人在场地内运动的图片做帧差运算即可得出机器人的实际位置。
2.3 目标识别
经过帧差法得到的目标图像可能有多个,因此需要在多个目标当中识别出真正的机器人目标。本文在实际识别过程中,首先使用边缘检测算法将疑似目标的轮廓识别得出,然后计算轮廓的像素个数即可得到目标图像的周长,而目标面积即为轮廓围成的面积。对于目标的外形特征,可使用轮廓的Hu不变矩进行相似性判定。Hu不变矩在图像旋转、缩放、平移等操作后,仍能保持矩的不变性,所以Hu不变距能识别图像的轮廓特征[9]。
3 定位测量算法
在成功识别机器人的基础上,即可寻找机器人的几何中心,将其在图像中的像素坐标按照比例换算成为实际场地上的坐标。而机器人方位角的确定则需要进一步处理。定位测量的参数包括测量机器人在场内的横坐标、纵坐标、方位角等。定位时首先在机器人外壳上绘制一箭头标记,通过该标记的几何中心位置以及指向來反映机器人的位置及方位。
在运算过程中,计算机首先识别出该标记,然后使用一个面积尽量小的矩形框外接在该标记上,通过识别该矩形框长边与水平线的夹角即可计算出机器人的方位角。
4 结论
本文通过计算机视觉技术对机器人定位的方法,系统主体由摄像头、计算机、机器人系统三部分构成,降低系统复杂度。
该方法使用计算机视觉技术对室内场地机器人进行定位,相对以ZigBee为代表的基于无线定位技术的方法,不易受到无线电和超声波的影响,稳定性好。
该方法能够一次性得到机器人的位置和方位角信息,与以惯性导航为核心技术的航迹推算法对比,无累计误差,具有较高精度。
参考文献:
[1] Farhad Shamsfakhr, Bahram Sadeghi Bigham, Amirreza Mohammadi, Indoor mobile robot localization in dynamic and cluttered environments using artificial landmarks[J],Engineering Computations,2019,36(2):400-419.
[2] 刘艳,董宽. 基于超声波传感器的室内机器人定位研究[J]. 信息技术, 2015(8): 54-56.
[3] 杨佳丽,史恩秀等.基于无线网络的室内移动机器人定位方法研究[J]. 机械科学与技术, 2013,03: 457-461,468.
[4] 刘焕玲,刘桂华等.基于一维激光测距仪的室内移动机器人定位[J]. 工具技术,2011(10): 79-83.
[5] 王志君. 移动机器人全场定位系统的研究[D].成都:电子科技大学,2015:1-10.
[6] 高云峰,周伦,吕明睿,等.自主移动机器人室内定位方法研究综述[J].传感器与微系统,2013,32(12):1-5.
[7] 邹宜成,梁红.室内智能移动机器人ZigBee无线网络定位技术[J].武汉理工大学学报(信息与管理工程版),2012,34(2):151-155.
[8] 张星龙,冯全.采用透视变换提高车辆识别准确率的方法研究[J].电子设计工程,2015,23(1):191-193.
[9] 董昱,郭碧. 基于Hu不变矩特征的铁路轨道识别检测算法[J],铁道学报,2018,23(1):64-70.
【通联编辑:张薇】
