基于局部一致性的特征匹配算法
2019-11-01姚晋晋张鹏超王永鑫王彦
姚晋晋 张鹏超 王永鑫 王彦

摘要:针对特征匹配对尺度、光照变化敏感的问题,提出一种改进ORB特征提取方法,并采用基于局部一致性的方法进行匹配。首先采用改进ORB算法提取鲁棒性更强的特征点,并计算特征点的方向与描述子,接着采用暴力匹配进行粗匹配,最后根据运动平滑性的条件使用基于网格运动统计的方法剔除误匹配。实验结果表明所研究算法在尺度、光照等条件变化时匹配平均精度仍然大于95%,具有较好的匹配准确率和鲁棒性。
关键词:ORB;特征匹配;局部一致性;运动统计
中图分类号:TP391.4 文献标识码:A 文章编号:1007-9416(2019)07-0128-03
0 引言
图像匹配是计算机视觉领域一个基本问题,目的是为了寻找图片对应的运动关系,目前常用的匹配方法是基于特征点的匹配,然而该方法由于特征点的固有问题,容易受到光照、尺度、视角等影响,匹配准确率有待提高。随机采样一致性(RANSAC)方法是常用的特征匹配算法,但是算法复杂度较高,无法满足实时性要求较高的系统。Zhang Songtao[1]等人提出了基于双向交叉匹配和距离阈值的匹配方法,提高了匹配的准确率,然而正确匹配数量却随之减少了;Yong An[2]等人提出了一种基于k近邻的用于SIFT特征的匹配算法,根据特征点周围的附属点判断匹配是否准确,从而实现误匹配的筛选,具有良好的去误匹配的能力;Jiawang Bian[3]提出一种基于网格运动统计(GMS)的特征匹配方法,该方法在运动平滑的假设上,通过计数邻域的匹配点个数判断匹配是否正确,提高了匹配准取率,但是为了保证效果,需要提取大量的特征点。
为此,本文提出了改进的ORB方法进行特征提取,采用Hessian矩阵计算关键点,并计算关键点的方向,使其具有尺度和旋转不变性,并采用BRIEF描述子对关键点邻域内随机生成的点对进行灰度值的比较,通过Hamming距离进行暴力匹配得到粗匹配结果,最后采用基于局部一致性的方法进行误匹配的去除,从而提高特征匹配的准确率。
1 算法描述
1.1 改进ORB特征提取
传统ORB算法不具备尺度不变性,为此在OpenCV中的ORB算法构建了金字塔,在多尺度上提取特征点,但对于模糊的图片仍然难以达到较高的匹配效果,本文采用Hessian矩阵[4]为核心的方法提取特征点,具有更强的鲁棒性。
2 实验分析
为验证本文算法的图像匹配效果,本实验主要采用OpenCV视觉库在牛津大学图像匹配数据集中进行。实验在Ubuntu16.04系统下进行,CPU为i5-4258,2.4GHz,8G内存。为了验证匹配算法在不同环境下的效果,分别在模糊程度不同,光照不同,以及视角不同的条件下,对暴力匹配、基于RANSAC的方法的匹配和本文算法进行对比实验。
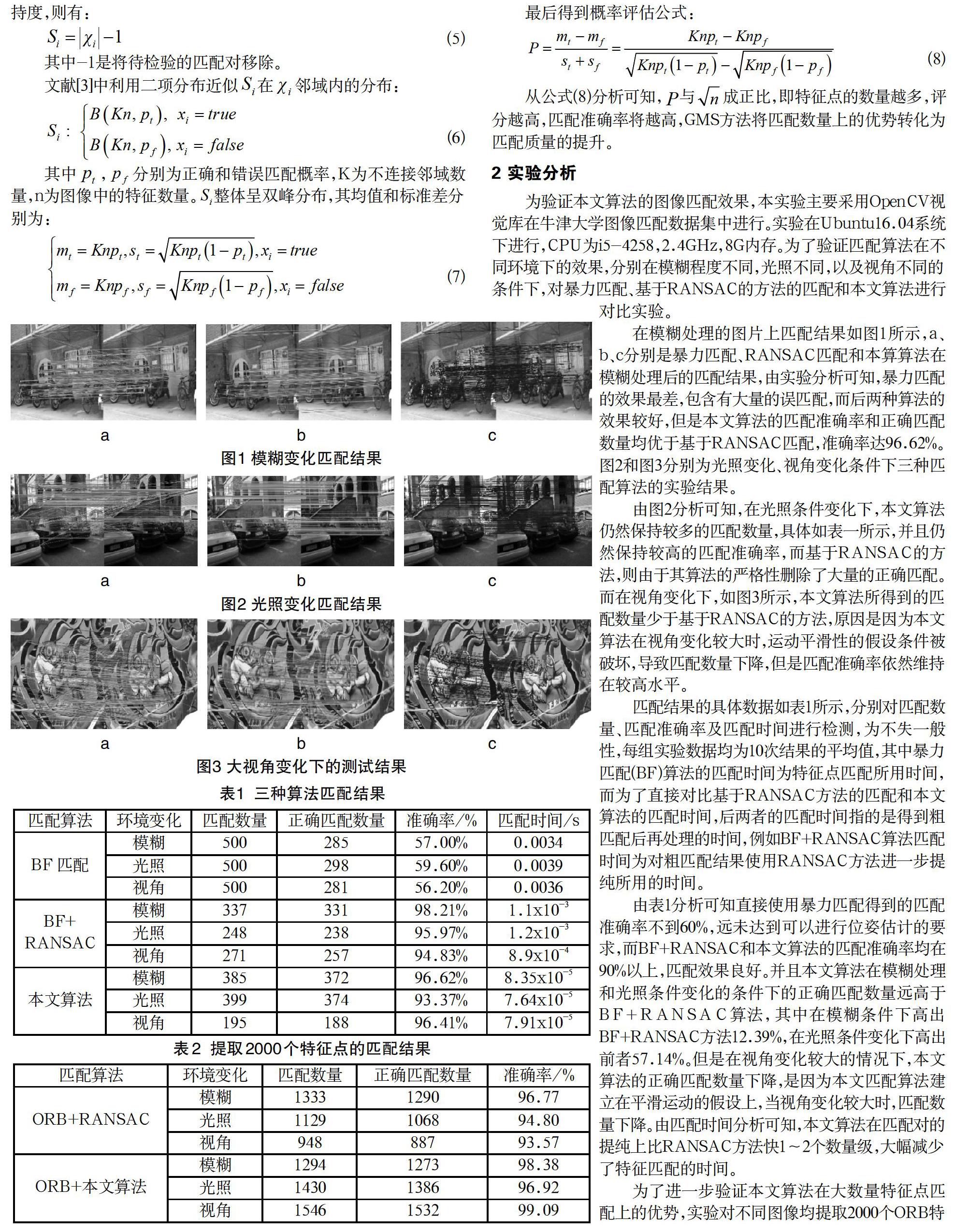
在模糊处理的图片上匹配结果如图1所示,a、b、c分别是暴力匹配、RANSAC匹配和本算算法在模糊处理后的匹配结果,由实验分析可知,暴力匹配的效果最差,包含有大量的误匹配,而后两种算法的效果较好,但是本文算法的匹配准确率和正确匹配数量均优于基于RANSAC匹配,准确率达96.62%。图2和图3分别为光照变化、视角变化条件下三种匹配算法的实验结果。
由图2分析可知,在光照条件变化下,本文算法仍然保持较多的匹配数量,具体如表一所示,并且仍然保持较高的匹配准确率,而基于RANSAC的方法,则由于其算法的严格性删除了大量的正确匹配。而在视角变化下,如图3所示,本文算法所得到的匹配数量少于基于RANSAC的方法,原因是因为本文算法在视角变化较大时,运动平滑性的假设条件被破坏,导致匹配数量下降,但是匹配准确率依然维持在较高水平。
匹配结果的具体数据如表1所示,分别对匹配数量、匹配准确率及匹配时间进行检测,为不失一般性,每组实验数据均为10次结果的平均值,其中暴力匹配(BF)算法的匹配时间为特征点匹配所用时间,而为了直接对比基于RANSAC方法的匹配和本文算法的匹配时间,后两者的匹配时间指的是得到粗匹配后再处理的时间,例如BF+RANSAC算法匹配时间为对粗匹配结果使用RANSAC方法进一步提纯所用的时间。
由表1分析可知直接使用暴力匹配得到的匹配准确率不到60%,远未达到可以进行位姿估计的要求,而BF+RANSAC和本文算法的匹配准确率均在90%以上,匹配效果良好。并且本文算法在模糊处理和光照条件变化的条件下的正确匹配数量远高于BF+RANSAC算法,其中在模糊条件下高出BF+RANSAC方法12.39%,在光照条件变化下高出前者57.14%。但是在视角变化较大的情况下,本文算法的正确匹配数量下降,是因为本文匹配算法建立在平滑运动的假设上,当视角变化较大时,匹配数量下降。由匹配时间分析可知,本文算法在匹配对的提纯上比RANSAC方法快1~2个数量级,大幅减少了特征匹配的时间。
为了进一步验证本文算法在大数量特征点匹配上的优势,实验对不同图像均提取2000个ORB特征点,再对其分别用RANSAC和本文算法进行提纯,匹配结果如表2所示。
从表2分析可知,在环境变化时,本文算法相对于传统RANSAC算法可以保持较高的准确率,平均提升3.08%,同时保留的较多的正确匹配,尤其是在光照条件和视角变化时,所得正确匹配数量大幅提升,对三维重构具有重要意义。
3 结论
实验结果表明,本文所提出的算法在图像亮度变化和模糊情况下,具有较好匹配效果,在保证一定准确率的同时,可以得到更多的正确匹配,有利于位姿估计和三维重建,并且相对于RANSAC方法,本文算法的提纯时间减少了1~2个数量级,大大减小了去除误匹配的时间,但是在视角变化变大时,匹配数量有所下降,仍需进行改进。
参考文献
[1] Songtao Z,Chao L, Liqing L.An improved method for eliminating false matches[C]// International Conference on Image.IEEE,2017.
[2] Yong A,Hong Z.SIFT matching method based on K nearest neighbor support feature points[C]// IEEE International Conference on Signal & Image Processing. IEEE,2017.
[3] Bian J,Lin W Y,Matsushita Y,et al.GMS: Grid-Based Motion Statistics for Fast,Ultra-Robust Feature Correspondence[C]//2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). IEEE,2017.
[4] Bay H,Tuytelaars T,Gool L V.SURF:Speeded up robust features[J].Computer Vision & Image Understanding,2006,110(3):404-417.
[5] Gao X,Zhang T.Robust RGB-D simultaneous localization and mapping using planar point features[J].Robotics& Autonomous Systems,2015,72:1-14.
[6] 王瑜,禹秋民.基于曲率特征與改进的RANSAC策略的图像匹配算法[J].计算机工程与设计,2018,39(12):3791-3796.
[7] 孙莹.图像特征点提取与描述算法研究[J].网络空间安全,2016,7(2):18-21.
