应用于无人机的无线充电技术研究
2019-10-31马秀娟武帅蔡春伟秦沐杨子
马秀娟 武帅 蔡春伟 秦沐 杨子
摘要:针对无人机有线充电不便利、需要人工干预的问题,采用磁耦合谐振式无线充电技术,设计一种无人机无线充电系统。提出一种适用于无人机无线充电耦合装置,其发射装置具有双极性磁场特性,接收装置采用在小型铁氧体条上绕制线圈的方式,接收装置装设在起落架底端。利用有限元分析方法分析耦合装置磁场分布,发现磁场被约束在接收装置附近,避免无线充电系统对无人机产生漏磁干扰。根据系统恒压输出要求选择原边LCL一副边串联补偿拓扑,建立系统电路数学模型,获得输入输出电压关系,以指导系统参数设计。搭建样机系统,结果表明:系统实测与电路模型计算理论值一致;所设计系统可以在错位30mm的范围内对80w无人机正常充电。
关键词:无人机;无线充电;磁耦合谐振;耦合装置;补偿
DoI:10.15938/j.emc.2019.08.001
中图分类号:TM12文献标志码:A 文章编号:1007-449X(2019)08-0001-09
0引言
无人机(unmanned aerial vehicle,UAV)具有高灵活性的优点,已经在侦查、勘测、巡检、救援等领域发挥重要作用。受负重能力的限制,无人机搭载电池容量有限,续航能力不足、巡航范围受限成为限制无人机进一步发展的瓶颈问题之一。目前,无人机充电主要依赖于人工手动插拔插头的方式,这种方式降低了无人机的作业范围,即使利用中继充电站对无人机进行电能补给也无法摆脱充电过程中人的作用。而且,传统接触式充电方式自动化程度低,降低了无人机的工作效率,也无法实现无人机无人值守的目标。无线充电技术避免了导线的直接接触,省去了人工插拔插头的步骤,为无人机充电过程实现全自动提供了可能。
磁耦合谐振式无线充电是无线充电领域应用最为广泛的一种方式,其基本原理是在原边发射线圈通人交变励磁电流后产生交变磁场,完成电能到磁能的转变,该交变磁场与接收线圈耦合后感生出电动势,实现磁能到电能的转化,最终以非导线直接接触的方式实现电能传递。此外,通过调整电路参数,使发射端和接收端工作在相同的谐振频率下,可以提高系统的电能传递能力及效率。当前,已有一些学者尝试对无人机进行无线充电,以提高无人机作业范围、实现其无人值守。韩国庆尚大学将发射线圈和接收线圈设计为平面空心线圈,接收线圈装设在机架侧面,实现充电功率51w,最大效率63.4%。印度学者采用沿无人机机架四周绕制空心线圈的方式,实现35W、效率71%的无人机无线充电。意大利罗马大学采用将空心平面接收线圈装设在无人机腹部的方式,在对准良好的条件下实现功率70w、效率89%的电能传递。受接收线圈装配位置的影响,以上几种方案的接收线圈与发射线圈之间距离较远,耦合能力弱,而高的耦合能力是确保系统高效率无线传输电能的基础。为提高耦合能力,香港城市大学采用沿无人机起落架底端四周绕制接收线圈的方式。这种方式提高了耦合能力,但只能针对腹部没装设云台或其他作业设备的无人机。如果无人机装设这些设备,设备会直接暴露在耦合装置的交变磁场中,影响设备性能,甚至遭到损坏。同样,之前提到的几种方案也存在耦合装置与无人机之问的漏磁干扰问题。对于以上问题,F.Maradei提出在起落架底端装设一个小平面线圈的方案,该方案既适用于无人机腹部装设设备的无人机,也有高的耦合能力,但对于错位的容忍能力低,需要通過外加辅助设备移动发射装置实现精确对准。
为扩大无人机巡航范围、实现无人值守、提高无人机工作效率,有必要研究无人机无线充电技术。搭载云台或其他设备是无人机完成侦查、巡检等任务的必要手段,必须考虑无线充电系统与无人机设备之间的漏磁干扰问题。为保证充电性能的可靠性,耦合装置必须具备一定容忍错位的能力。因此,设计一种对于错位容忍能力强,同时又能有效约束磁场,避免对无人机产生漏磁干扰的无线充电系统就显得尤为重要。基于以上问题,本文将提出一种应用于无人机无线充电的耦合装置,分析该装置磁场分布以及对于错位的敏感性;设计无人机的无线充电系统拓扑结构,并建模分析,利用模型设计系统参数;最终,搭建样机并测试系统性能。
1无人机无线充电系统设计
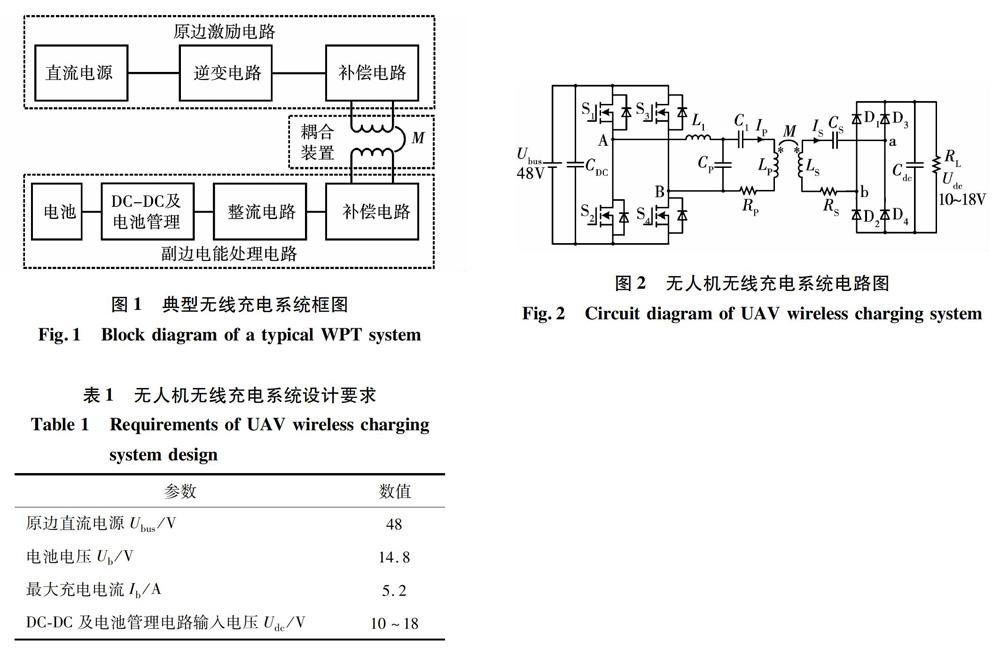
典型的无线充电系统如图1所示,其主要包含3部分。原边激励电路产生10~100kHz的正弦电流,此正弦高频电流通过原边发射装置后激励出交变磁场。副边接收装置通过磁场耦合方式接收原边发出的电能,从而实现电能的无线传输。副边电能处理电路先将交流电变换成电池需要的直流电,再经过DC-DC及电池管理电路后给电池充电。原边直流电源为整个系统提供电能,其可以由市电整流得到,也可以直接由蓄电池来充当。考虑到无人机巡航路线中部分区域离电网较远,需要使用新能源发电加蓄电池储能的方式作为充电站电源,本文采用48V直流电源进行供电。逆变电路实现直流到交流的电能转换,其主要有2种结构,即电压型逆变电路和电流型逆变电路。电流型逆变电路具备短路保护能力,并且电感的寿命比电解电容寿命长。相比电流型逆变电路来说,电压型逆变电路只需要在直流侧并接大电容就可实现,制作成本低,所以本文采用电压型逆变电路。相比于传统电机、变压器等强耦合系统来说,用于无线充电系统的耦合装置漏感较大,如果不进行补偿,将会有较大的无功功率流过逆变电路,这既会增加系统损耗,同时也增加了器件应力。通过在发射端添加补偿电路,可使逆变电路电压和电流同相位,从而避免无功功率流经逆变桥引起额外损耗;通过在接收端添加补偿电路,可有效提升电能传递能力。本次系统设计的详细要求如表1所示,无人机采用的电池电压为14.8V,最大充电电流5.2A。DC-DC及电池管理电路正常工作要求的输入电压范围为10~18V。
无线充电系统常用的4种基本补偿方式有:原边串联一副边串联(series-series,SS)、原边串联一副边并联(series-parallel,SP)、原边并联一副边串联(parallel-series,PS)、原边并联一副边并联(parallel-parallel,PP)。并联补偿由于电容的作用,电压无法突变,在采用电压型逆变桥时需采用SS或SP补偿方式。sP补偿方式存在反映电抗,而且该反映电抗与负载电阻相关,系统充电过程中会改变电路功率因数,影响系统效率;ss补偿只有纯阻性的反映电阻,系统功率因数不受负载电阻影响。但SS输出是恒流特性,而本文无人机无线充电系统的DC-DC及电池管理电路要求有较稳定的电压,即要求系统具有恒压输出特性。对比之下,本文在发射端选用电感一电容一电感(inductor-capaci-tor-inductor,LCL)混合补偿方式,该补偿方式优势在于:工作在谐振状态时,输出励磁电流不受负载电阻和耦合系数的影响。此外,LCL补偿的功率因数不受耦合系数、负载等参数变化的影响,能在恒频控制方式下保持逆变桥高效率工作。当耦合装置原边发射线圈通入恒定励磁电流后,副边采用并联补偿即可恒流输出,副边采用串联补偿即可恒压输出,因此本文采用原边LCL一副边串联(LCL-S)的补偿拓扑。本文采用的无线充电系统电路拓扑结构如图2所示。添加补偿电容C1是为得到相应的输入与输出电压增益,其还能防止直流成分流过耦合装置引起磁芯饱和,该部分将在后文进一步分析。
2耦合装置设计
2.1耦合装置的提出
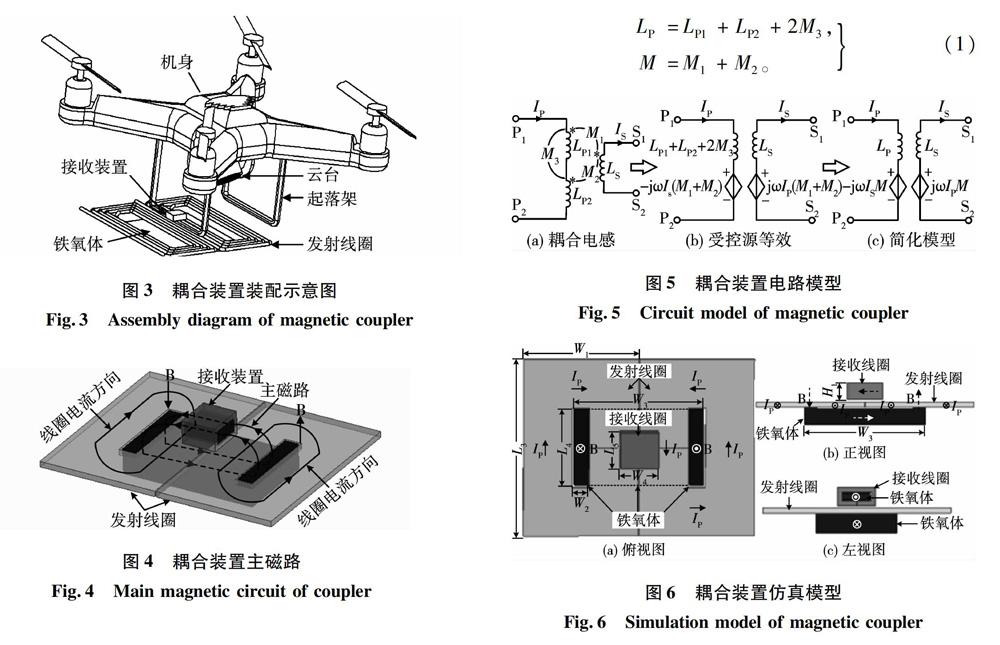
耦合装置对于无线充电系统至关重要,耦合装置决定了系统的耦合能力,从而决定了系统的电能传递能力;耦合装置的几何形状决定了磁场分布,进一步决定了无线充电系统对无人机的漏磁干扰水平;耦合装置对于错位的敏感性决定了系统的适应能力。相比于电动汽车无线充电的耦合装置来说,无人机对耦合装置的体积与重量有严格要求,大的体积与重量都可能会引起无人机续航能力降低、机身不平衡等问题,因此无人机无线充电系统对耦合装置要求更为苛刻。耦合装置之间的气隙是决定耦合能力的一个关键因素,为了提高耦合能力,本文将耦合装置放置在无人机起落架底端。但小的气隙容易引起耦合装置对非对准情况的过度敏感,即耦合装置在小范围错位时耦合装置自感、互感参数发生大的波动,此时要保证系统正常工作,就需要采用变频控制等更复杂的控制系统来调节,这无疑增加了系统复杂度。针对于此,本文提出一种适用于无人机的双极性耦合装置,如图3所示。该耦合装置即使在小气隙时也能保证耦合装置参数稳定,这样提高了耦合能力,降低了漏磁,也能保证使用简单的恒频控制系统完成无线充电。
发射装置由发射线圈以及放置在发射线圈下的铁氧体磁芯构成。发射线圈分成2个平面螺旋线圈,并且2个线圈的电流走向相反,如图4所示,发射线圈中的一个平面螺旋线圈电流方向为顺时针方向,另一个平面螺旋线圈的电流方向为逆时针方向。相反的电流走向使得发射线圈内部磁场有2个方向,即一个平面螺旋线圈内部磁场垂直线圈平面向上、另一个平面螺旋线圈内部磁场垂直线圈平面向下,发射装置磁场具有双极性特性。在发射线圈下放置铁氧体磁芯,可以减小磁路磁阻,提高耦合能力,同时降低系统漏磁。
接收装置装设在起落架底端,其采用了小的I型铁氧体磁芯,外侧绕制接收线圈。由于接收装置中放置了铁氧体,铁氧体磁阻比空气中小很多,所以发射线圈中的一个平面螺旋线圈发射出的磁通绝大多数会经由接收装置的铁氧体进入发射线圈的另一个平面螺旋线圈内部。发射线圈下方也放置了铁氧体,最终构成整个主磁路,耦合装置的主磁路如图4所示。由于接收线圈绕制在接收端的鐵氧体上,当上述交变磁通穿过接收端的铁氧体时,也就穿过了接收线圈,从而实现电能的无线传输。
发射装置的2个平面螺旋线圈通过串联连接最终构成一个发射装置,耦合装置双极性磁场的特性使得2个平面螺旋线圈的电路和磁路均串联连接。耦合装置的电路模型如图5所示,其中Lp1和Lp2分别是发射线圈的2个平面螺旋线圈自感,M1和M2分别是2个平面螺旋线圈与副边接收线圈的互感,M3是2个平面螺旋线圈之间的互感。对图5(a)列写KVL方程并化简,可将图5(a)化简为图5(b)。如式(1)所示,耦合装置的等效原边自感和原副边等效互感可分别用Lp和M表示,耦合装置电路模型进一步简化为一个发射线圈和一个接收线圈的模式,如图5(c)所示。因此,在图2中直接使用了一个发射线圈、一个接收线圈的耦合电感模型代表所设计耦合装置。
2.2耦合装置磁场分析
利用有限元仿真工具ANSYS Maxwell搭建耦合装置的仿真模型,如图6所示。仿真模型的具体参数如表2所示。
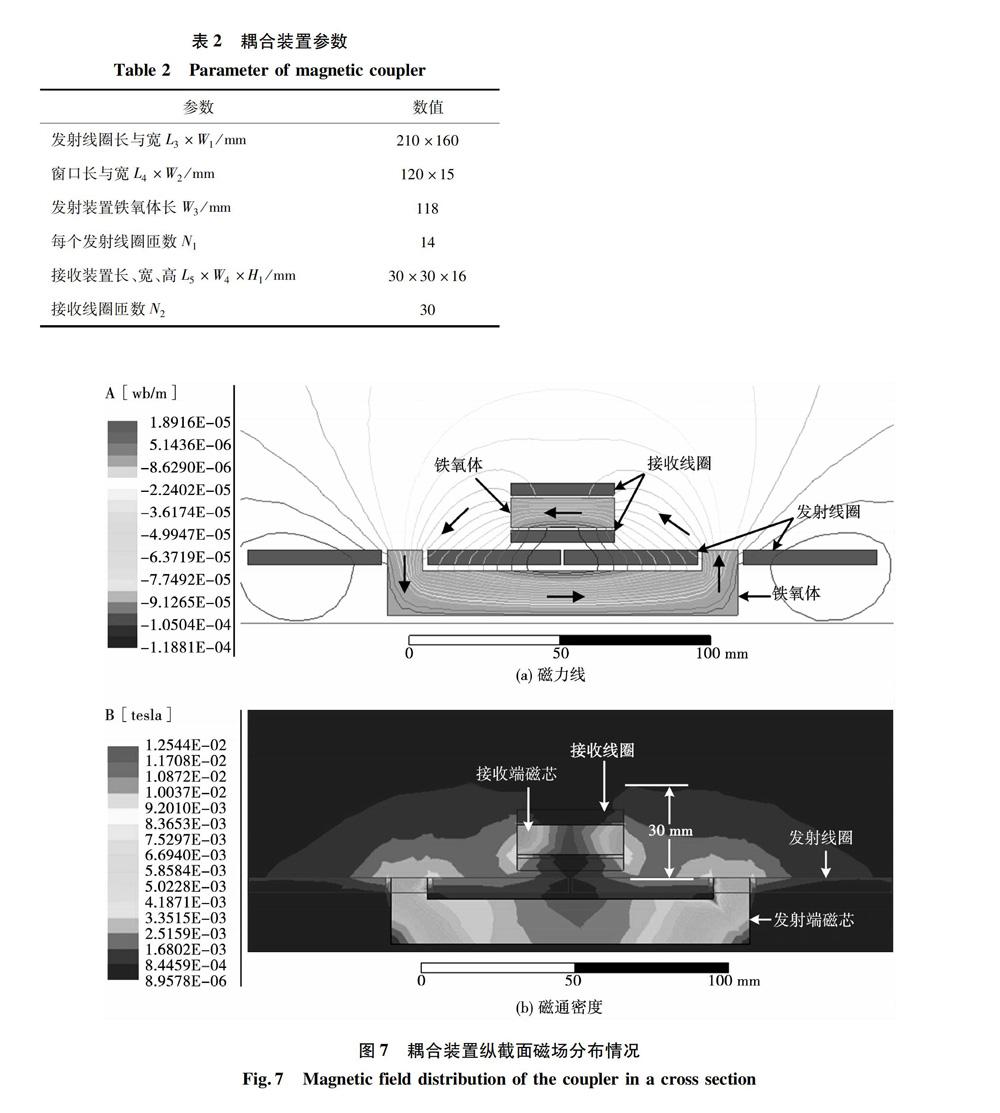
图7(a)是耦合装置的磁力线分布情况。可发现,其主磁路与上述分析一致;磁力线的疏密程度代表磁场强度,由图中能看出,发射装置发出的磁通绝大多数流经接收装置的铁氧体,耦合装置有较强的耦合能力。无线充电系统依靠交变磁场来传递电能,无人机云台等机身设备如果暴露在该交变磁场中,会对这些设备造成影响,甚至损坏这些设备,所以漏磁干扰问题是设计无人机无线充电系统应该考虑的一个重要因素。图7(b)是原边发射线圈电流为4.3A时耦合装置的磁通密度分布,此时的磁场是系统传输78w时对应的峰值磁场。从仿真结果可得到,耦合装置磁场主要分布在发射装置以上30mm高度范围内,在高于30mm的高度上磁通密度低于8.96uT,不会对无人机机身设备造成影响。磁芯饱和会造成磁芯损耗增加、系统温升加快等问题,所以磁芯的饱和问题也是无线充电系统设计中应该考虑的一个方面。本文使用的磁芯材料是TDK公司的PC40,该材料25℃时饱和磁通为510mT。图7仿真结果表明,系统在传递90w功率时对应的峰值磁通密度是12.544mT,远低于材料饱和磁通密度。
2.3耦合装置容错位能力分析
受无人机降落精度限制,无法保证无人机每次都精准降落,即使安装辅助耦合装置对准的设备,也有一定的误差,所以耦合装置需要有一定的容错位能力。耦合装置原边及副边自感和原副边之间的互感随错位的变化情况是体现系统容错位能力的重要因素。由于补偿电容是基于对准良好时的参数计算得到,并且错位过程中补偿电容不会改变,这就要求错位过程中系统自感要稳定,否则系统工作状态将发生改变;此外,互感决定了副边接收电能的能力,为了保证系统输出电压与输出功率稳定,就需要错位时互感降低速度慢。为了测试耦合装置的容错位性能,根据表2参数搭建如图8所示的耦合装置。自感、互感随错位的变化情况如图9所示。
由图9可得,耦合装置原边自感受非对准的影响较小,在x轴和Y轴偏移40mm时,原边自感分别减小1.028uH和2.215uH。副边接收装置自感在x轴和y轴偏移40mm时,分别增加2.089uH和减小2.064uH。耦合装置自感变化小,自感变化对补偿电路谐振工作状态影响小;互感受错位的影响较大,当偏移大于30mm时,互感跌落速度加快,这会影响到的系统的电能传递能力。该耦合装置可容忍错位的范围在后文讨论。
3电路系统分析与设计
谐振补偿电路有带通滤波作用,分析时只需要考虑基波成分即可。逆变桥采用互差180°的互补控制方式,通过傅里叶分解得到逆变桥输出电压基波有效值为。
本文研究针对静止式无线充电技术,充电过程中互感和自感都是恒定的。由式(13)可得,只要保持输入电压恒定,就可以实现恒压输出。另外,要得到规定输出电压范围,只需要相应地调整耦合互感M和等效电感厶即可。前文中测得耦合装置原边自感与互感分别为78.1uH和16.78uH,在不添加C1时,由式(4)知L2=Lp此时由式(13)得uab为9.28V,刚好满足系统输出电压需求。但还需要考虑耦合装置非对准和线圈内阻的影响,非对准时,系统的互感会降低,则输出电压也会降低,此时系统小范围偏移就会导致无法正常充电,即系统对于非对准的容忍能力降低;此外,线圈内阻也会影响到系统输出电压,在电池充电初期,负载电阻小,则输出电压会因为线圈内阻分压过多而低于忽略线圈内阻时推导的理论值,如果输出电压理论值设置过低会导致系统无法正常充电。考虑到以上情况以及防止过压损坏DC-DC及电池管理电路,本文将系统输出直流电压目标值区问设置为15~18V。如式(4)所示,通过添加c1可以降低等效漏感L2,即提高了M与L2的比值,从而提高输出电压。本文设计补偿网络参数见表3,根据式(13)得到Uab理论值为15.758V,此时输出直流电压为17.5V。
4系统实验
为了测试无线充电系统的性能,根据以上计算参数搭建如图11所示的实验系统。在输入电压48V、负载电阻2.4Ω、工作频率50kHz、良好对准的工作条件下,对系统进行测试。逆变桥输出电压和电流波形如图12所示,从图中看出电压与电流同相位。利用功率分析仪测试系统的电能传递能力如图13所示。系统输出功率为77.62w,从系统直流输入侧到负载侧效率为77.81%,所搭建的实验系统可以实现对无人机进行无线充电。
系统充电过程中负载电阻会不断变化,图14是系统输出电压随负载变化情况的测试结果。发现:负载电阻变化时,系统的输出电压基本恒定,验证了系统的恒压源输出特性;负载电阻较小时,实测值与理论值相差较大,主要由于理论分析时忽略了线圈内阻。在充电初期等效负载电阻值小,线圈内阻分压所占比例大,导致输出电压较低;随着负载电阻增大,系统内阻分压所占比例越来越小,实测值逐渐趋于理论值。当负载电阻为35Ω时,实际输出电压为15.7V,与理论值偏差1.8V(主要由于理论分析时忽略了二极管和开关管导通压降)。
图15是在耦合装置发生错位时,输出电压的测试及理论计算结果。为了削弱系统内阻对于测试结果的影响,选择负载电阻为35Ω时进行测试。其中,理论值根据图9耦合装置自感与互感测试结果及上述电路模型计算得到。结果表明,测试结果与理论值吻合,证明可以利用所建立电路模型指导系统参数设计。另外,系统分别在x轴和y轴的[-30mm,30mm]范围内偏移时,系统输出电压均在12.7V以上,此时即使负载电阻较小,输出也在10V以上;而当偏移到40mm时,输出电压为10V附近,系统稍微出现波动就可能导致DC-DC及电池管理模块无法正常充电,即本无线充电系统在x軸及Y轴容错位能力均设定为[-30mm,30mm]。
5结论
本文为无人机设计一个无线充电系统,其中包含提出一种耦合装置,以及设计能保持输出电压恒定的系统电路。通过对耦合装置的有限元分析可知,耦合装置能有效将磁场约束在发射装置平面上方30mm高度以内,避免无线充电过程中交变磁场对无人机的漏磁干扰。通过测量并对比不同偏移情况下耦合装置自感与互感,分析获知耦合装置错位时自感变化小,不会对电路谐振工作状态造成影响;互感在x轴和y轴30mm错位范围内互感波动小,系统有较强的容错位能力。通过对设计系统建模分析,获得输入与输出电压之间的内在数量关系。搭建实验系统,证明系统的恒压输出特性,得到系统的容错位能力,并验证所建立的输入与输出电压关系模型的准确性。该模型可以用于指导对于输入和输出电压有特定要求的无线充电系统设计。
