基于多目标扰动观测器的不确定机器人滑模自适应轨迹跟踪控制*
2019-10-31刘树博刘国权周焕银罗先喜江思懿
刘树博,刘国权,周焕银,罗先喜,杨 波,江思懿
(东华理工大学 a.江西省新能源工艺及装备工程技术研究中心;b.机械与电子工程学院,南昌 330013)
0 引言
机器人是一类具有高度非线性、强耦合性和时变性的系统,且在工作中会受到所在环境、摩擦、负载扰动等因素的影响,因此机器人是一个典型的非线性不确定系统,其精确的数学模型往往难以得到,给机器人轨迹跟踪控制带来了一定的困难。
针对机器人的跟踪控制问题,国内外学者进行了大量研究,并取得了一些显著的研究成果[1-5]。滑模控制是一类特殊的非线性控制,对系统模型的不确定性和外界扰动具有高度的鲁棒性,已被成功应用于机器人跟踪控制中。文献[6-7]提出了基于神经网络补偿的滑模变结构控制,增强了系统鲁棒性,达到了良好的跟踪效果。文献[8]对机器人轨迹全局滑模鲁棒自适应控制进行研究,仿真结果表明了该算法的有效性。文献[9-10]提出了一种自适应滑模轨迹跟踪控制器,成功地解决了系统中未知参数、外界扰动和负载给机器人带来的不利影响。
到目前为止,大量的机器人控制策略,都是在系统动力学及其相关信息已知的前提下进行的。然而在实际工程中,机器人特性往往无法精确获取,甚至是完全未知的,使原有控制策略无法有效执行,从而降低了其实用性和有效性。因此,研究一种实用性较强,不依赖于机器人先验信息的控制策略,具有十分重要的意义。
扰动观测器技术,可用于逼近系统中的不确定干扰,对抑制机器人系统扰动和增强系统鲁棒性,起到了促进作用[11-12]。结合滑模控制和干扰观测器的各自优点,本文将二者相结合,以不确定机器人为研究对象,利用系统可测输出,提出一种不依赖系统先验信息的非抖振滑模自适应控制策略,通过与已有算法进行比较,进一步验证了该算法的实用性与有效性。
1 机器人轨迹跟踪问题描述
考虑具有n个关节的刚性机器人系统,其动力学方程可描述如下:

(1)


(2)
式中,x=[x1,x2]T∈R2n×1为系统状态变量;
f(x,t)=-M-1(x1)·[-C(x1,x1)x2-G(x1)]∈Rn×1;ω(x,t)=-M-1(x1)·Γ(x1,x2,t)∈Rn×1;
b(x,t)=M-1(x1)∈Rn×n。
机器人是典型的非线性不确定系统,在实际工程中获取其精确的模型难度较大,即便是标称模型也是十分难得。因此,设计一种新型实用的数学模型,对机器人跟踪控制问题的研究,具有十分重要的意义。鉴此,将模型(2)进行修改,可得如下形式:

(3)
其中,kc为待定时变正数,
d=ω(x,t)+f(x,t)+[b(x,t)-kc]u(t)为n×1阶集总扰动向量。



(4)

本文研究的问题可描述如下:为机器人系统设计滑模控制规律,考虑所有的外界扰动和内部不确定性,设计不基于系统先验信息的滑模自适应控制律u,使得对于任意初值(e1(0),e2(0)),当t→∞时,e1→0且e2→0,使机器人关节实现对给定信号的跟踪。
2 滑模跟踪控制器设计
为了实现机器人的轨迹跟踪控制,本节首先根据机器人轨迹跟踪目标,设计出合适的切换函数,其次基于切换函数设计扰动观测器来实现对扰动向量的估计,最后基于Lyapunov方法设计自适应滑模控制器,实现机器人关节对给定信号的有效跟踪。
2.1 滑模控制律的提出
设计以下复合滑模面s:
(5)
其中,In为n阶单位矩阵;s∈Rn×1,K1=k1In∈Rn×n,K2=k2In∈Rn×n;k1>0,k2>0为待定常数。将式(4)代入式(6),可得:
(6)
假设2 :给定期望跟踪轨迹xr光滑,且其三阶导数存在。
对式(6)进行求导,可得:

(7)

假定系统(4)的状态变量可测,采用指数趋近律,基于式(7)设计得到滑模控制律如下:

(8)

(9)

式(8)是一个关于控制输入u的微分方程,通过对不连续切换项进行积分运算,可对抖振现象起到了较好地抑制效果。
2.2 多目标扰动观测器的设计
2.2.1 观测器结构设计
在控制律(8)中,由于存在扰动估计向量,因此设计扰动观测器是十分必要的。设计扰动观测器结构如下:

(10)


(11)
基于式(11),进一步推导可得:
(12)


(13)
2.2.2 观测器多目标设计方法

(14)
引理2:根据极点配置理论[14],系统(13)的闭环极点处于Θ(qc,ra)中,当且仅当存在2n阶对称正定矩阵Σ2,满足以下不等式
(15)
基于定理1,最优观测器矩阵Q*可以通过求解以下优化问题获得:
minρs.t. 式(14~15)
(16)
多目标设计方法兼顾了观测器的稳定性和动态性能,与已有报道[15-16]相比,具有更加优异的动态性能。
对于优化问题(16)的求解,有以下两方面值得注意:首先,Q由矩阵T和F相加而成,其特殊结构并不利于直接利用LMI方法进行求解。其次,在Σ1=Σ2的前提下进行求解,势必会给求解带来一定的保守性。因此,针对具有特定结构的矩阵Q,采用一种非保守的求解方法,是十分必要的。本文采用了将差分进化算法和LMI相结合的方法,对其优化问题(16)进行求解,获得的最优观测矩阵为Q*=arg infρ。算法具体步骤详见文献[17-19],流程图如图1所示。

图1 求解算法流程图
2.3 滑模自适应控制律设计
定理2:针对机器人系统(1)及复合滑模面(5),选取滑模控制律(8)及以下自适应控制律:
(17)
式中,α和β为自适应学习率。若控制律(8)中的切换增益满足条件ks=kc+k+ε,其中ε为任意正数,则跟踪误差系统(4)全局渐进稳定,即t→∞时,系统的位置跟踪误差e趋近于零。
(18)

对V进行求导可得:
(19)
将式(9)代入式(19)中,可得:
(20)
再将式(17)代入式(20)中,可得
(21)

3 仿真分析
将本文控制算法应用于双连杆机器人中[20],其状态方程如下:
(22)


仿真中需要设定参数如下:首先,选取qc=200和ra=40,使用MATLAB中的LMI工具箱求解优化问题(17),可得最优观测器矩阵为:
其次,滑模面参数为K1=K2=4I2;最后,自适应率选为α=0.03,β=0.01,ε=0.5。
文献[20]基于机器人回归矩阵模型,利用新型的Nussbaum函数设计了自适应跟踪控制律。为了进一步说明控制效果,与文献[20]的方法进行对比,仿真结果如图2、图3所示。从图中的对比可以发现:在本文算法控制下,机器人关节响应速度更快,且具有更小的稳态误差,因此能够更好地实现对给定信号曲线的跟踪,达到了更好的控制效果。由于本文算法只以系统输出信号为反馈,不依赖系统的模型结构,因此具有更强的实用性。


图2 关节1位置及速度跟踪误差曲线

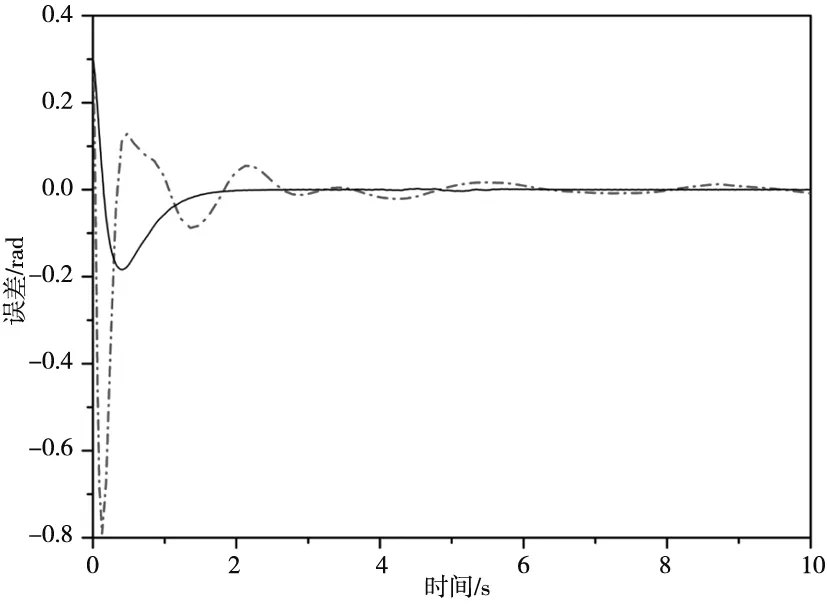
图3 关节2位置及速度跟踪误差曲线
4 结论
以非线性不确定机器人为研究对象,使用多目标扰动观测器逼近系统的建模误差和不确定干扰项,在此基础上研究了非抖振滑模自适应跟踪控制策略,并通过Lyapunov方法设计了自适应控制律,确保了系统的全局稳定性。最后,通过与已有文献的结果相比,验证了所提控制策略的实用性和有效性。
