CINRAD/CD雷达伺服系统频发故障判断与处理总结
2019-10-30李翠翠冯和平余代辉任恒怡
李翠翠,杨 震,冯和平,余代辉,任恒怡
(1.贵州省大气探测技术与保障中心,贵州 贵阳 550081;2.贵州水利水电职业技术学院,贵州 贵阳 551400;3.贵州省黔东南自治州气象局,贵州 凯里 556000)
0 引言
2017年11月—2018年12月,贵州新一代天气雷达故障发生30次,伺服系统故障占了总故障的37%。有很多人已对CINRAD/CD雷达伺服系统的故障进行了分析总结,如周枫等的CINRAD/CD雷达伺服系统故障分析及处理[1],陈士英等的简析CINRAD/CD型新一代天气雷达伺服系统故障排除方法[2],边智等的新一代天气雷达(Cinrad/CD) 伺服故障实例分析[3],但是他们仅是对伺服故障进行了分析总结,并没有给出伺服系统信号流程。由于伺服系统包括伺服机柜、天线座以及信号处理柜中的主控分机,它们相距较远、线路复杂、电缆较长、元件较多[4],伺服系统的故障多种多样,因此掌握伺服系统信号流程是解决伺服系统故障的根本方法。
1 CINRAD/CD雷达伺服系统原理及信号流程
CINRAD/CD雷达伺服系统由伺服分机、电源分机、方位(俯仰)驱动分机、方位(俯仰)直流电动机、方位(俯仰)减速器、方位(俯仰)同步机等构成。
伺服系统完成驱动雷达天线作方位、俯仰转动,天线工作状态的控制操作由监控系统根据终端计算机发出的指令实施。伺服系统把代表当前天线的位置信息的同步机(方位 、俯仰主发送器)三相电子电压和单相转电子电压送至信号处理系统,由信号处理系统将同步机电压变换成16位方位和16位俯仰角码,再送至监控系统的伺服驱动单元[5],监控采集计算机根据终端计算机给的天线预设位置的角码信息和当前天线位置的角码信息,通过伺服驱动单元产生驱动雷达天线方位运动误差电压和俯仰运动误差电压,再送到伺服分机。伺服分机对误差电压进行处理放大后,再由驱动分机处理产生功率足够大的驱动信号,来驱动雷达天线和同步机朝减小误差的方向运动,直到误差为零,雷达天线处在一个新的踪位置上。
伺服系统除了有位置环,还有电流环、电压环和速度环。电流环的电流信号是由驱动分机的功率放大器输出至方位、俯仰电机电枢导线上的电流传感器来产生,电流信号称为限流信号,限流信号与误差信号相减,形成加速度负反馈,用于抑制电流上升率。电压环的电压信号取决于电机电枢两端的电压,电压信号称为电压反馈信号,电压反馈信号与误差信号相减形成电压负反馈,抑制电压上升率。速度环的速度信号由方位、俯仰测速电机产生,称为阻尼信号,阻尼信号与误差信号相减,形成速度负反馈,对伺服系统起稳定作用。CINRAD/CD雷达伺服系统工作原理及信号流程图如图1所示:
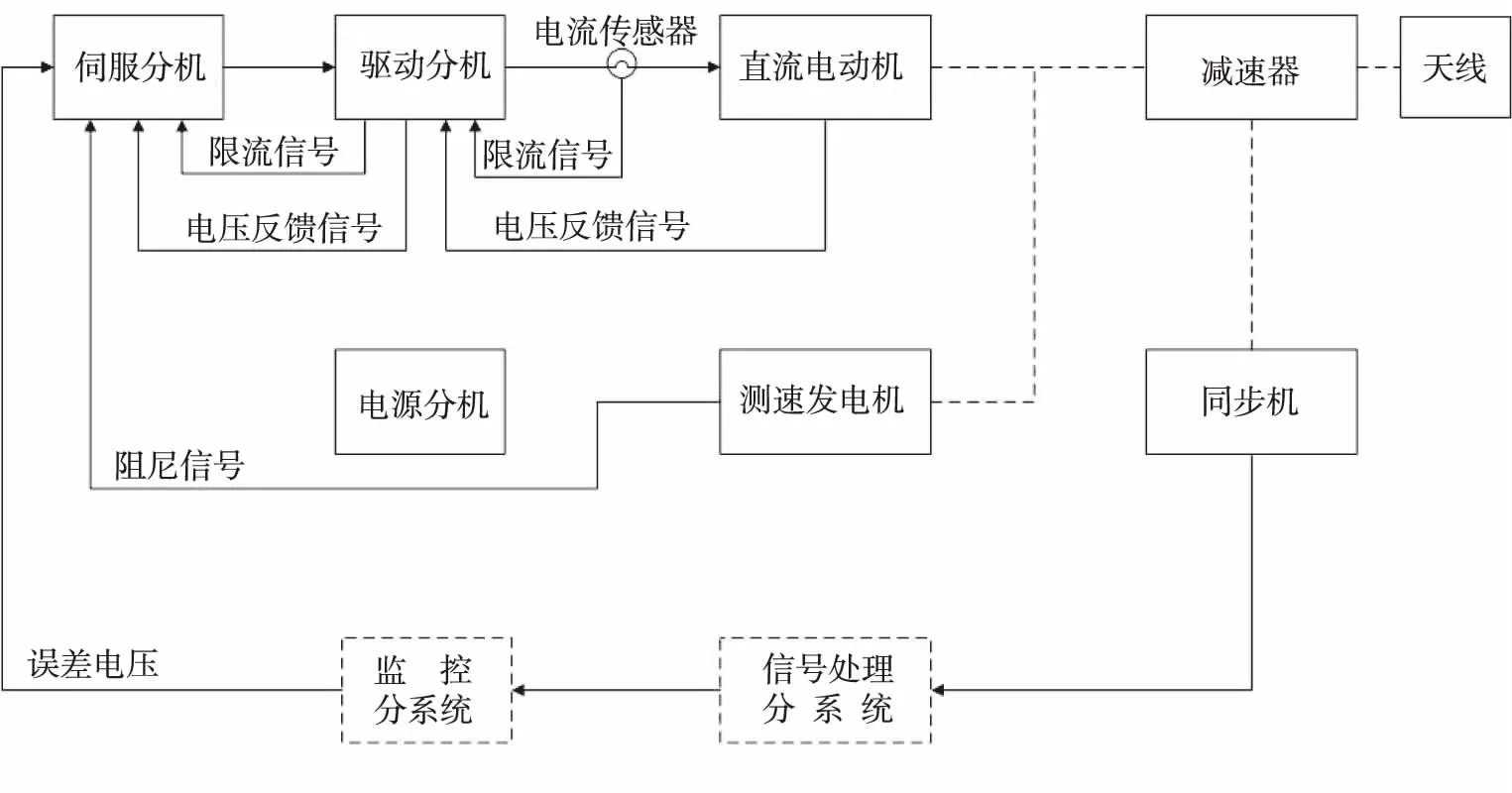
图1 CINRAD/CD雷达伺服系统工作原理及信号流程图Fig.1 CINRAD/CD radar servo system working principle and signal flow chart
2 CINRAD/CD雷达伺服系统频发故障判断与处理
2018年贵州CINRAD/CD雷达伺服系统频发故障分别是:雷达做体扫(CAPPI)时,出现停留在某一层做PPI,雷达天线不能抬升,但有时候又可以抬升,反复出现;雷达天线转速过快或过慢;雷达天线突然停止转动。下面将雷达伺服系统故障现象,根据伺服系统信号流程进行分析、判断和处理。
2.1 雷达做体扫(CAPPI)时,出现停留在某一层做PPI,雷达天线不能抬升,但有时候又可以抬升,反复出现
故障分析:该类故障属于雷达天线定位的问题,根据信号流程该类故障可能性在:同步电机、汇流环、伺服分机。
判断流程:查看监控采集计算机有没有发仰角命令值,如果发了,再看监控分机面板上仰角示值是否稳定,若跳变幅度大,不稳定,且天线追摆严重(大于3次),先检查伺服分机的伺服放大器,因为伺服放大器的增益太大或阻尼太小都会导致天线定位精度差,若调节伺服放大器电位器RP8和RP5无效,再检查汇流环、俯仰同步电机等。
故障案例处理:2018年 8月27日—2018年10月4日,都匀雷达时不时出现该故障,查看监控分机面板上的示值不稳定,且天线追摆严重,通过调节俯仰伺服放大器电位器RP8和RP5,来调整角度定位时的系统阻尼大小和增益,故障暂时解除,正常运行10多天故障又复现,由于上次调整伺服分机无效,此次先检查汇流环,查看是否是汇流环接触不良引起仰角值变化,取下汇流环未发现明显异常,清洗汇流环,故障暂时解除,运行10多天故障又复现,查看监控分机面板上的示值不稳定,且天线追摆严重,仍将故障判断在伺服分机,更换伺服放大器后,故障解决。
2.2 雷达天线转速过快或过慢
故障分析:该类故障属于雷达天线转动速度的问题,根据信号流程该类故障可能性在:方位电机、伺服分机。
判断流程:根据故障检修原则,首先检查伺服分机,通过调节伺服分机中的伺服放大器的电位器RP6,来改变PPI/RHI状态速度,若故障依旧存在,再检查方位电机。
故障案例处理:2018年5月11日黔东南雷达转速较快,通过调节方位伺服放大器的电位器RP6,雷达天线转速正常,但是切换到体扫,雷达天线不转。进一步检查故障,拆下方位电机,发现方位电机有磨损,更换方位电机后,故障解除。
2.3 雷达天线突然停止转动
故障分析:根据信号流程,该故障可能性在:方位电机。
故障案例处理:2018年11月24日黔东南雷达出现天线突然停止转动,伺服系统无报警,检查监控分机无异常信息,打在应急状态,手控操作天线,天线仍不转,拆方位电机,发现齿轮卡住,更换方位电机后恢复正常。
3 CINRAD/CD 雷达伺服系统维护及定标
周、月维护时,要记录监控分机状态信息,并与正常值进行对比分析;做好电机维护,避免碳刷磨损造成接触不良;做好转台部分的维护,检查汇流环、电刷等,必要时进行清洗和更换;检查伺服系统方位、俯仰精度,当伺服系统控制精度检验时方位角和俯仰角最大差值大于±0.1°,须进行定标。
4 总结
伺服系统故障多种多样,只要台站人员做好常规维护和定标,可有效避免一些松动、断线等软性故障。在伺服系统故障中,雷达技术保障人员按信号流来确定雷达故障处理步骤,可有效提高故障处理效率。
