基于单片机的智能输液控制系统的设计*
2019-10-29黄海波杨冬英
黄海波,杨冬英
(山西大学商务学院,山西 太原 030031)
0 引言
我国人口众多,尽管我国一直在大力发展公共卫生事业,但是相比较庞大的人口,医疗资源还是显得有些不足,特别是近几年城市化推进,医疗资源更是紧张。当前我国大部分的输液还是人工来观察和控制输液的速度,有时会出现偏差无法准确控制液体的流速[1]。输液时药物过快过慢都会对病人的身体造成损害,但输液的快慢还要根据病人的实际情况确定,因此设计一个智能的输液控制系统来控制液滴的流速,还要及时检测回血,及时能够停止输液,医护人员在护士站能够观察到病人的输液情况,这样能够极大的降低错误的发生率,减少医疗事故的发生,节省人力物力,提高医院的工作效率[2]。
在医疗监控系统中,液面高度是一个重要的信息,因为在当代医学中,太多医疗手段是以输液为主,例如静脉输液、透析机透析治疗等等。液面高度是一个重要的信息,因此在设计医疗监控系统时首要考虑的是如何将液面高度信息提取出来,这个液面高度信息必须是精确的[3]。这有一定的技术难度,所以长期以来没有合理有效的自动监控装置,对输液液面进行精确的监控,平常医院经常采用的人工进行监控,这不仅浪费了人力资源而且还常常出现一些人为因素的过失,此外,血液回流也是一个亟待解决的地方,人工控制总会出现错误情况发生,因此,设计一种智能输液监控系统能够合理解决上述问题。
1 设计总体思路
本系统选用STC89C51单片机为控制核心,基于STC89C51单片机的输液监控系统主要有两大部分组成。主站的主要功能是监控从站的液面高度以及回血检测,同时还有报警模块,一旦有从站的输液情况发生异常会发出警报提醒医护人员。从站上面装了液面高度采集模块和以红外光电传感器为核心的回血检测传感器,从站的主要功能是向主站传递液面高度信息以及回血检测的信息[4]。系统的总体框图1所示。

图1 系统的总体框图
1.1 系统的硬件设计
根据输液控制系统的功能要求,监控系统的硬件设计主要由以下两个部分组成:
1) 主站主要由以单片机和外围电路组成的核心控制电路用以完成信号的处理以及药品滴速的控制,同时还搭配有无线发射模块以及报警模块,回血检测装置以及用于改变输液瓶角度的步进电机单元[5]。
2) 从站主要有无线接送模块,声光报警模块,数码管显示模块以及传感器模块。
1.2 主站各系统单元的设计
近年来,随着软硬件技术的不断进步,单片机的功能越来越强大,凭着其低功耗、高性能、外围兼容接口丰富的特点在市面上十分流行。本设计采用STC89C51单片机作为处理器。它能在小型的电器件中作为一个处理器来使用,软件编程和特定的外围电路一起搭配使用即可实现。
1.2.1 点滴信号检测单元
此单元的主要作用是检测输液器是否在正常工作。单元电路图如图2所示。

图2 点滴信号检测电路
红外对管传感器由两部分组成,其一是红外线发射管,其二是受光管,众所周知红外线抗干扰能力比较强,所以由它作为传输介质最为合适。其次它的优点是尺寸小性能稳定所以作为本系统检测滴速的传感器[6]。
1.2.2 声光报警电路
本设计的报警模块有蜂鸣器和二极管组成,当主站检测到从站滴液出现异常的时候,报警模块启动,会有灯亮起同时发出警鸣声,方便医护人员第一时间处理。图3是声光报警模块电路图。

图3 声光报警模块电路图
2 液体点滴监控系统的软件设计
KEIL是嵌入式领域系统开发工具,用于ARM的开发,一般来说也能用于单片机的开发,它能够编译源代码,管理用户所建的工程项目,并且具有模拟的功能,可以一定程度上进行仿真操作。它能最大限度的模拟以单片机为核心的硬件实物的工作,Proteus不仅能够模拟实物的设计图样,而且还能调试程序的代码,做到软硬件协同仿真。输液智能监控系统由两部分组成分别是主站和从站[7]。从站不仅需要完善的电路设计更需要软件编程控制,从站的软件编程主要需要完成以下功能:
1) 液面高度信息的采集
2) 药品滴速的控制
3) 血液回流信息的采集
4) 具有中断功能
5) 具有计时功能
6) 具有报警功能
7) 具有信息发送功能
2.1 主站各模块的软件设计
从站的软件程序模块有两个重要组成部分,系统核心的主控模块和各个功能模块,统一由主控模块来进行控制。
1) 主控模块设计。主控模块是整个系统软件的控制核心,具有复位计时以及中断功能,在进行工作之前先进行初始化,在数据储存和管脚连接同时进行初始化。在进行管脚串口初始化的时候要把其位于高电平上,即写入1,此时的各个串口为数据接入口。同时单片机的串口必须设置中断方式,因为考虑到实际的情况列如回血等,必须要求输液能立即停止,所以必须设置中断方式。在数据初始化方面,在每次复位重启后,模块自动对可写入数据区进行数据清零,方便每次工作时数据的重新写入。
2) 点滴速度测量模块设计。点滴速度可以有以下两种方式进行测量,两者的主要区别是选择的测量单位不同,第一种是选择以点滴的间隔为单位,通过记录每两滴滴落的时间间隔,规定一段时间,通过时间除以间隔来确定滴数,这种方法比较适合滴速变速的时候使用,第二种方法是选取一段时间作为单位时间记录滴数,通过一定的运算测出滴速,但是这种方式会有一定的误差,所以在滴速一定不变的情况下,选取多个时间段去平均值来取得单位平均滴数,达到一个非常高的精度[8]。
3) 电动机控制模块设计。电动机控制实现原理如下:系统首先设置标准点滴速度,然后检测当前点滴速度,若小于标准速度,电机控制点滴装置上升直到标准速度,然后慢慢降低装置高低使速度和高度建立一一对应的关系。
至于点滴速度的控制是通过改变输液管上的快慢控制器或者对输液管的夹持松紧度来实现对点滴速度的控制,考虑到高度的测量较为困难,而高度或松紧度与步进电机的转角有关,我们可以通过改变转角来控制的值从而达到对滴速的控制[9]。步进机调整点滴速度的流程图如图4所示。
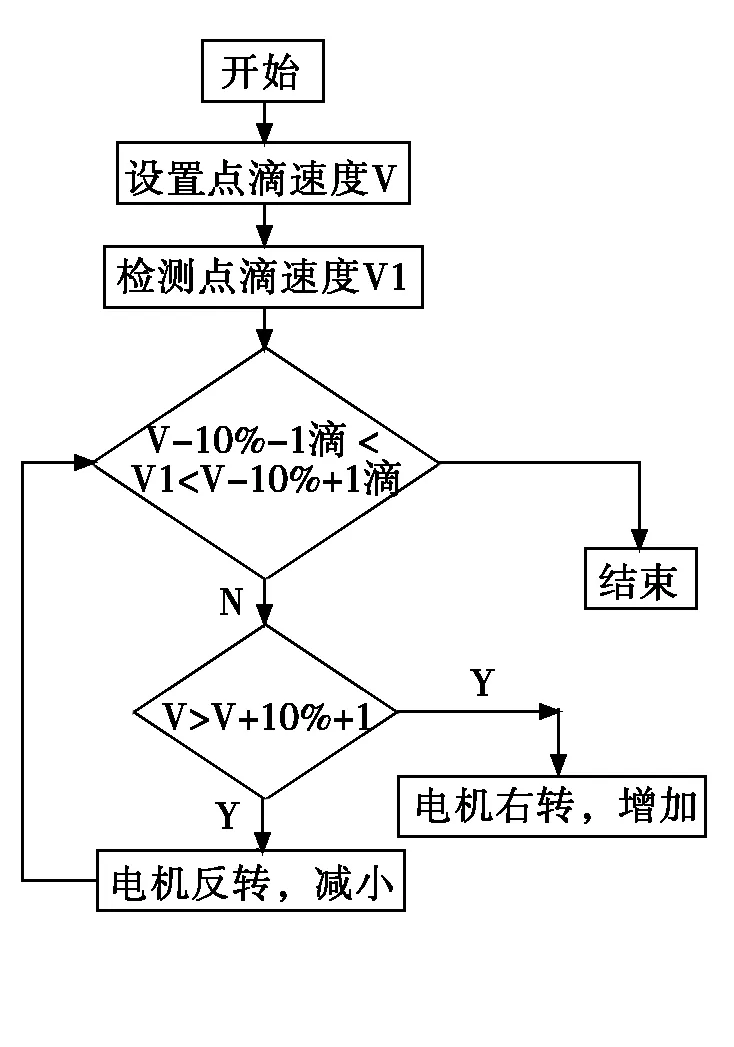
图4 步进电机调整点滴速度
4) 报警模块设计。系统设计中当液面低于或高于设定的数值时,报警模块收到信号开始报警,信号灯闪烁和蜂鸣器发声,发出警报提醒医护人员。报警模块的软件设计是整个系统软件设计非常重要的一环。如图5所示。
3 结论
整个系统设计立足于实际,功能众多,性能稳定具有一定的实用价值,实现了对液体下落的监测,能够设置滴速快慢的上限和下限值,在发生回血情况时,电机及时工作阻止血液回流,发生异常情况时发出警报灯和蜂鸣器的警告,以及处于监控室的无线接收模块能接收到输液室发出的各种信息。适合目前我国没有普及智能医疗的现状,在卫生医疗领域具有广泛应用前景。