计及响应的电力系统防电压失稳综合控制策略
2019-10-28叶伟涛温步瀛王怀远江岳文
叶伟涛, 温步瀛, 王怀远, 江岳文
(福州大学电气工程与自动化学院, 福建 福州 350108)
0 引言
随着区域电网规模的不断扩大, 大量具有较强不确定性的新能源对电网的渗透率不断提高, 使系统的电压稳定问题受到更强力的挑战[1-3]. 目前时域仿真和灵敏度分析是获得控制策略的主要方式. 时域仿真需要通过离线预决策计算获得故障或扰动所匹配的控制措施, 需要考虑的样本量太大且制定的控制策略难以满足各种系统方式、 运行状态下的有效性与经济性[4]. 而灵敏度分析试图寻找到稳定量化指标与控制变量之间的解析表达式. 文[5-6]依靠指标反映了控制节点对其余节点的控制效果影响, 采用了快速预测以克服线性误差问题, 从而保证预防控制效果的可靠性. 广域测量系统[7]以测量信息为基础, 为局部指标法的发展与应用提供了新的契机. 文[8]以有功扰动分配特征为基础, 计算计及机组动态特性的减载控制灵敏度; 文[9]利用电力系统的广域量测信息计算节点负荷裕度, 进而由系统负荷裕度推导控制效果的灵敏度, 以确定控制地点. 灵敏度分析为制定控制措施提供了一种有效途径, 但其存在一定的局限性: 当可控量与量化指标之间的关系比较复杂, 如果采用线性化分析方法其结果的准确性无法保证, 而采用高阶灵敏度分析时, 关系式则难以解析表达[10-11]
本研究首先利用广域监测系统(wide area measurement system,WAMS) 测量信息计算各节点电压稳定指标, 通过分解等值负荷中的转移负荷推导各可控节点功率变化与危险节点电压稳定指标之间的耦合关系, 建立量化各控制节点对危险节点控制效果的指标, 以此进行控制节点的选择和控制量计算.
1 电压不稳定指标的建立

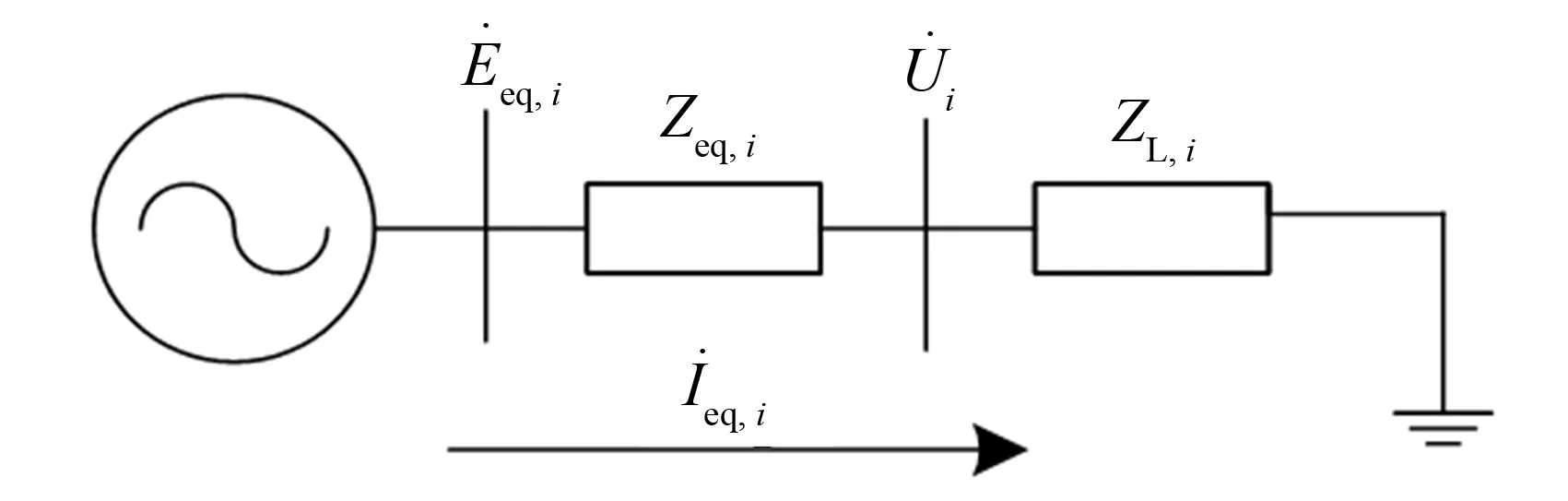
图1 戴维南等值系统Fig.1 Davidnan equivalent circuit

利用相对阻抗模指标来衡量电压失稳程度, 对于节点的表示为:
(2)
当系统处于稳定状态时, 所有IVSI, i都将远小于1,IVSI, i的大小可表现节点的电压稳定程度, 则系统的电压不稳定指标IVSI可由系统内所有节点的不稳定指标获得, 为:
IVSI=max{IVSI, i}
(3)
2 控制地点的识别
由图1可得, 等值负荷可表示为:

(4)
分析式(4), 等值负荷可分解成节点i自身负荷Ss, i及其他节点对节点i的转移负荷St, i, 即:

(5)

图2 分解后的等值系统 Fig.2 Equivalent system after decomposition
转移负荷可表示为:


(6)
转移导纳可表示为:

(7)
则戴维南等值电路可分解成如图2形式.
相对阻抗模指标可表示为:

(8)
将各导纳表示成各个节点功率的形式:

(9)
式(9)体现各节点参数与危险节点的电压不稳定指标之间的关系, 当判定系统某节点处于危险状态时, 首先利用无功补偿进行控制, 当无功补偿量不足时, 就需要考虑启动切负荷控制以达到改善电压稳定性, 避免系统失稳. 通过式(9)对可进行控制的控制节点j的无功、 有功偏导, 提取出共同因子作为衡量各控制节点对危险节点的控制效果的R指标.
(10)
其中:Zeq, i表示节点i的系统等值阻抗;ZLL, (ji)为节点j与节点i之间的互阻抗;UL, i、UL, j表示负荷节点i、j的节点电压.
式(10)表示各个切负荷节点无功、 有功变化量对电压危险节点不稳定指标的灵敏度, 通过计算各无功补偿节点和切负荷节点的指标, 即可获得控制节点对电压危险节点的灵敏度排序, 以施加相应控制, 灵敏度指标在计算过程中, 需要已知该节点在控制后的电压幅值. 为了实现实时计算, 忽略控制前后受控节点电压的变化.R指标越大则该节点与受控节点的关联程度越密切, 则在此节点控制能达到较好效果, 因此可选择R指标大的节点作为控制地点.
3 控制量计算
已知系统侧等值阻抗Zeq, i不受节点i负荷变化的影响. 另外,Ui总保持在标幺值1附近, 因此在电力系统运行中可近似认为其不变. 而等值负荷Seq, i中虽然包含除控制地点外的其他节点的转移负荷, 但由于非控制节点对危险节点的R指标较低, 短时间内负荷的小范围波动对等值负荷Seq, i的整体影响不大, 因此不论控制节点地点是否位于本地, 除控制节点外其他节点对切负荷地点的负荷变化并不敏感, 故认为在控制节点切负荷时, 其他负荷近似维持恒定.
当甄别出电压危险节点后, 需对其电压不稳定指标进行控制, 当控制节点有足够的无功储备时, 可由下式计算系统中对危险节点的无功补偿量, 但此结果为理论值, 与实际会有一定误差.

(11)
式中:IVSI, i, pre为当前危险节点的电压不稳定指标;IVSI, tar为目标电压不稳定指标.
当控制节点无功储备不足且临近的控制节点拥有无功备用时, 可通过下式计算相邻控制节点所提供的无功补偿, 改善电压不稳定指标. 其补偿效果与R指标有关,R指标越大, 补偿效果越好.
(12)
式中: ΔQk0表示已实施无功补偿控制的控制节点控制量;Rki表示已实施过无功补偿控制节点的R指标.
当无功储备消耗殆尽而电压不稳定指标未达期望值时, 可采用下式的切负荷策略以改善电压稳定性,

图3 实际控制与拟合曲线对比Fig.3 Comparison of actual control and fitting curve
式中: ΔIVSI, i, Q为由无功补偿控制改善的电压不稳定指标.
本方法本质上是通过各节点实时电压、 电流量拟合电压不稳定指标曲线, 得到近似切线, 如图3所示. 在轻负荷时, 拟合斜率相当接近实际斜率; 而重负荷时, 由于忽略了加速变化的电压及转移负荷, 拟合斜率略小于实际斜率, 在切负荷计算中, 这将造成切负荷计算量略大于实际需要而实现超量控制. 因此, 本方法在切负荷后总是能满足电压稳定性的要求, 所得结果有一定裕度, 结果较为保守.
4 基于响应的防电压失稳控制方法
1) 当发现危险节点时, 利用R指标将可提供无功补偿的控制节点进行排序, 将R指标大于一定阈值的控制节点作为有效控制节点, 优先调用R指标最大的有效控制节点进行无功补偿控制, 一般为危险节点本身.
2) 当R指标最大的有效控制节点可提供的无功补偿量不足以将危险节点的电压不稳定指标控制到所设定的指标阈值时, 根据R指标排序依次调用无功补偿节点.
3) 当所有有效无功补偿节点无功储备已消耗殆尽而电压不稳定指标仍未到达期望的阈值时, 则采取切负荷策略改善系统的电压稳定性.
5 仿真计算
以0.5为电压不稳定指标限值及目标值进行仿真. 在节点IVSI大于0.5时, 根据既定方法进行控制, 以保证电压不稳定指标在0.5以下. 在IEEE-14节点系统中, 节点13与节点14发生断线故障, 则各负荷节点的电压不稳定指标如表1所示. 节点14的IVSI提升至0.658 181, 为系统最大且超过设定目标值0.5. 电压崩溃风险大幅度提升, 需采取电压稳定控制. 则其他节点对节点14的R指标如表2所示.

表1 故障前后各负荷节点的电压不稳定指标IVSI

表2 各控制节点对节点14的R指标
设定R指标大于0.2的为有效控制节点, 则节点14、 9可作为有效无功补偿节点.
情景一: 当节点14本身具有足够的无功补偿量时, 只考虑节点14做无功补偿控制.
以电压不稳定指标下降至0.5为目标, 根据式(11)计算无功补偿量
在节点14实施0.192 7 p.u.的无功补偿后各节点电压不稳定指标如表3所示. 节点14电压不稳定指标下降至0.498 943, 低于目标控制值的0.5. 满足控制要求.
情景二: 当节点14本身可提供的无功补偿量不足时, 考虑其他有效无功补偿节点提供无功补偿, 假设节点14只能提供0.15 p.u.的无功补偿量, 以电压不稳定指标下降至0.5为目标, 由情景一可知节点14需要0.192 7 p.u.才可使节点14电压不稳定指标达到目标值, 由于节点14只能提供0.15, 为满足节点14的电压稳定性要求, 根据式(12)可计算节点9的无功补偿控制量为
在节点14实施0.15 p.u.无功补偿以及在节点9实施0.168 p.u.的无功补偿后各节点电压不稳定指标如表3所示. 节点14电压不稳定指标下降至0.475 913, 低于目标控制值的0.5, 满足控制要求.

表3 控制后各节点电压不稳定指标IVSI
情景三: 当节点14以及节点9的无功储备不足的时候, 由于其他节点R指标过低使得无功补偿代价过大, 则考虑适当切负荷控制. 假设节点14只能提供0.15 p.u.的无功补偿量, 节点9只能提供0.1的无功补偿量, 由情景二可知当节点14只有0.15 p.u.的无功补偿时需要节点9提供0.168的无功补偿才可达到电压不稳定指标目标值. 为了满足节点14的电压稳定性要求, 可根据式(13)计算节点14的切负荷控制量为

图4 各节点控制后效果对比 Fig.4 Comparison of control effects of each node
在节点14实施0.15 p.u.的无功补偿和切除 0.017 3 p.u.的负荷, 以及在节点9实施0.1的无功补偿后, 各个节点的电压不稳定指标如表3所示. 节点14的电压不稳定指标下降至0.476 43, 低于目标控制值的0.5, 满足控制要求.
由上述三种情况对比可以看出,
1) 三种情景下, 根据既定策略进行综合控制均能保证电压稳定性, 且控制后IVSI均略小于所整定的控制目标值, 达到超量控制, 如图4所示.
2) 在电压危险节点本地进行控制时计算控制量往往最小, 由R指标亦可知, 电压危险节点对节点自身的灵敏度大, 其电压不稳定指标与本地负荷关系更密切.
6 结语
提出一种基于广域测量信息的防电压失稳综合控制策略. 通过广域测量信息计算系统电压稳定性指 标, 并在此基础上计算各节点控制灵敏度, 进而求解控制量. 针对不同运行状态和故障状态, 给出合理有效的控制策略以改善电压稳定性, 防止电压失稳崩溃. 通过IEEE 14节点仿真可得, 基于广域测量信息的有功、 无功灵敏度可根据不同的运行状态, 提供有效的控制策略, 有利于运行人员更全面地实施相关策略以预防电压失稳. 由于本方法是一种线性化的灵敏度分析方法, 在运行点邻域内具有较高的准确度, 当控制目标运行点距离当前线性化的运行点较远时, 会因线性化误差而无法实现对系统电压不稳定指标的精确控制, 但其控制效果属于超量控制, 作为电压稳定的预防控制, 其计算精度是可以满足要求的.
