栅格DEM微地形分类的BP神经网络法
2019-10-28周访滨邹联华张晓炯孟凡一
周访滨,邹联华,张晓炯,孟凡一
(1.长沙理工大学交通运输工程学院,湖南 长沙 410114;2.长沙理工大学特殊环境道路工程湖南省重点实验室,湖南 长沙 410114)
地貌是地表高低起伏的形态,是内、外力地质作用对地壳综合作用的结果。微观地形地貌形态的划分是宏观地形地貌形态划分的延续和深化[1],同时也是数字地形分析的重要研究内容,在地学分析、环境工程、精细农业、精细林业、城市规划、自然灾害等领域有着广泛的应用前景和研究价值。
从Ruhe提出将山体地形划分为山顶、山肩、背坡、麓坡、趾坡和冲积地6种类型开创微观地形分类体系研究后,文献[2]在其分类体系基础上利用坡度、平面曲率、剖面曲率为分类指标制定出更为详细的分类决策方案。文献[3—4]以数字地形分析理论体系为框架,改进了Dragut的山体部位分类决策方案,并以黄土高原栅格DEM(digital elevation model)为源数据,提取相关的微观地形地貌因子,通过叠加分析实现了自动分类。文献[5]从地理学视角提出了一种模糊推理模型坡位划分方法。文献[6]将一种带有窗口机制的随机森林算法用于实现模糊坡位划分。这些研究为微观地形自动分类开辟了新思路,同时近年来,随着人工智能和机器学习的快速发展,神经网络用于地学分类的研究成果层出不穷,尤其是深度神经网络用于高光谱图像分类[7-10]及BP(back propagation)神经网络用于遥感影像分类[11-15]。这些成果证明了神经网络用于地学分类的有效性,借此本文研究尝试将BP神经网络引入栅格DEM的微地形自动分类,利用已有分类决策方案和先验知识确定典型样本,经样本数据的训练、检验与优化,实现BP神经网络对栅格DEM微地形自动分类,力求在流程上避免烦琐的数据叠加分析过程,并使分类结果的完整性和错分率都得到有效改善。
1 栅格DEM微地形分类的BP神经网络法
1.1 微地形分类决策方案
微观地形地貌的划分在不同学科领域学者的相关研究中形成了不同的分类体系,基于栅格DEM数字地形分析的微观地形分类体系建立,通常采用在DEM上获取微观地形地貌因子,如坡度、坡向、平面曲率、剖面曲率、坡度变率和坡向变率等,再将这些地形地貌因子组合形成合理表达地形类别特征的分类决策方案。本研究采用文献[4]中的山体部位分类决策方案,该方案以Ruhe的地形地貌分类体系为雏形,参考Dragut的表述形式并以坡度、平面曲率和剖面曲率为分类指标克服了原有山体部位分类决策方案存在的缺陷,见表1。
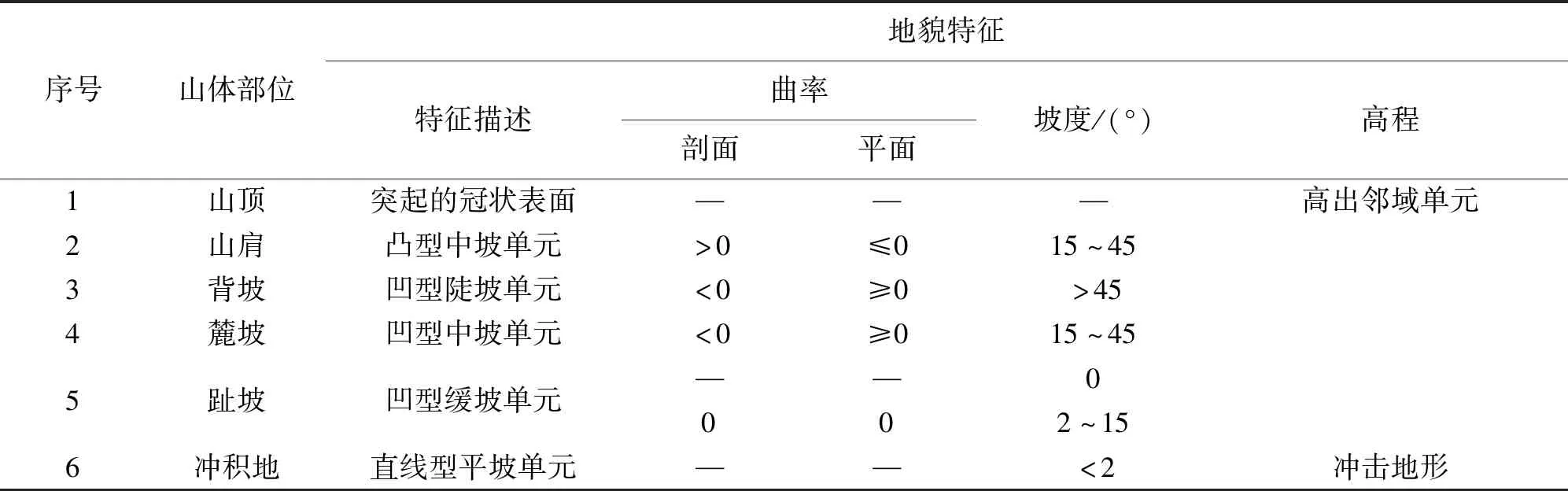
表1 山体部位分类决策方案
1.2 BP神经网络
BP神经网络是一种按照误差逆向传播算法训练的多层前馈神经网络,分为输入层、隐含层和输出层,层与层之间采用全互连方式,层内神经元之间无连接,是目前应用最广泛的神经网络。BP神经网络模型可分为信息的正向传递与误差的反向传播两个部分。正向传播是信息从输入层经隐含层逐层计算传向输出层。若是输出层的输出没有达到期望,则计算输出层的误差变化值,通过反向传播将误差信号沿原来的连接通路反传回来修改各层神经元的权值直至达到期望目标[13]。BP神经网络具有高度自学习能力和很强的泛化能力。然而,BP神经网络也存在易限入局部极小值、网络收敛速度慢、隐含层神经元个数无法确定等问题[11]。这些因素会影响网络的收敛和泛化能力。
1.3 基于BP网络的微地形分类流程
首先确定BP神经网络模型的层数、最大收敛次数、收敛误差及学习速率。选用栅格DEM为源数据,依据文献[4]中山体部位分类决策方案及先验知识确定BP神经网络算法的输入样本,并归一化处理后随机地输入到创建好的BP神经网络模型中,进行网络训练。然后使用测试数据对模型精度进行评价,优化初始权值和阈值,得到最优的模型。为更进一步验证该模型的适应性,继续利用该模型在包含样本区的试验区内完成了更多栅格DEM数据的山体部位自动分类。最后对分类结果进行了相关统计分析。该方法流程如图1所示。
2 试验与结果分析
2.1 样本数据的选取
本文选取黄土高原1∶10 000栅格DEM为源数据,任意裁切某区域为样本区,该区域最高点高程为1 031.6 m,最低点高程为889.8 m,相对高差为141.8 m,样本区像元大小为5 m×5 m,共有16 800个像元。样本区DEM晕渲图如图2(a)所示,确定的样本数据分布如图2(b)所示。依据文献[4]的山体部位分类决策方案和先验知识选取了4749个典型样点,各类型样本数据分布见表2。

表2 各类型样本数量分布
2.2 模型建立与精度评价
本研究应用BP神经网络算法实现了栅格DEM微地形的自动分类,为了取得更好的收敛效果,防止模型过拟合,建立的BP神经网络为三层网络模型,最大收敛次数为1000,收敛误差确定为10-3,学习速率为0.01。利用试验区内选取的典型样本数据进行BP神经网络算法山体部位自动分类试验,试验过程的BP神经网络混淆矩阵见表3。用典型样点建立的模型总体精度为0.954 2,Kappa系数为0.941 5,表明BP神经网络算法应用在微观地形自动分类上的精度可靠,也说明BP神经网络能够很好地挖掘隐含知识,并识别地貌类型,证实了BP神经网络算法在地形分类中的适用性。但BP神经网络法对6类微地形类别的适应性表现不一致,其中冲积地对该方法适应性最强,准确率为100%,背坡的适应性最弱准确率为89.23%,其他类别对应统计准确率见表4。

表3 分类结果混淆矩阵
2.3 试验结果对比分析
为验证本文所提出的自动分类方法的有效性,以图2样本数据区域为试验基础扩大试验区域,任意裁切某区域1∶10 000栅格DEM为试验数据,如图3(a)所示,试验区像元大小为5 m×5 m,共有160 000个像元。以文献[4]基于规则的叠加分析方法和本文建立的BP神经网络方法分别实现山体部位自动分类,分类结果如图3(b)、(c)所示。
在试验区用基于规则的叠加分析方法和基于BP神经网络的方法对每个格网点的山体部位进行分类残缺统计,见表5。可以明显看出,基于规则的叠加分析方法残缺度为42.39%,而基于BP神经网络的方法不存在残缺。究其原因,叠加分析法是对于每个格网点的多因子体系的分类方法,对于不同区域,地形的复杂情况不一致,残缺度范围不确定;而BP神经网络法利用其反向传播修正误差的优势解决了分类残缺问题。

表5 分类残缺统计
3 结 语
栅格DEM作为重要的基础地理信息数据,在测绘、遥感、资源、环境、农林、灾害、城市规划与军事等领域有广泛应用,栅格DEM的微地形分类则是这些应用精细化发展的基础研究工作。本文利用BP神经网络在地学分类中的优势将其引入栅格DEM的微地形分类,通过已有分类决策方案和先验知识确定典型样本,经样本数据的训练、检验与优化,实现了对试验区域山体部位自动分类并对分类结果进行了对比分析。研究结果表明,栅格DEM微地形分类的BP神经网络法在实践中是行之有效的,相较于叠加分析的分类方法,该方法可避免烦琐的数据叠加分析过程,也有效改善了分类结果残缺问题。但该方法对不同山体部位的适应性存在差异,这种差异的产生机理和误差存在的原因则需更进一步的研究。