基于GeoGebra的平面四杆机构运动可视化研究
2019-10-25李亚南王增胜
李亚南 王增胜
摘 要:为实现平面四杆机构的运动可视化,以曲柄摇杆机构、曲柄滑块机构、正平行四边形机构、反平行四边形机构等四种典型平面四杆机构为研究对象,借助GeoGebra构建机构模型,实现了平面四杆机构的动画演示。实践证明,利用GeoGebra易于实现平面四杆机构运动的可视化,其建模过程简单、高效,动画演示交互性较好。
关键词:平面四杆机构;GeoGebra;运动可视化
中图分类号:TB 文献标识码:Adoi:10.19311/j.cnki.1672-3198.2019.30.102
1 曲柄摇杆机构运动可视化
1.1 建立模型
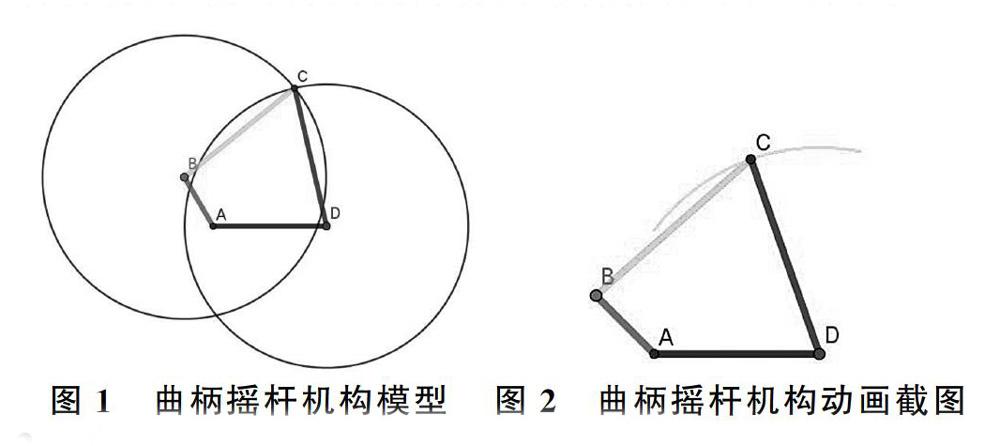
建模过程如图1所示,其步骤为:
(1)绘制机架。用线段命令作机架AD,此处AD长度为4。
(2)绘制曲柄。用定长线段或圆(圆心与半径)命令作曲柄AB,此处AB长度为2。
(3)绘制连杆和摇杆。用圆(圆心与半径)命令分别以点B、点D为圆心,5为半径绘制两个圆,选择其中一个交点,用描点命令标记为点C,用线段命令连BC、CD,得到连杆BC和摇杆CD。
为便于观察,可将各杆设置为不同的颜色,并增加其宽度,最终建立如图1所示的四杆模型。
1.2 动画演示
模型完成后,隐藏两个辅助圆,用轨迹命令指定显示点C的轨迹,手动拖动B点转动,或在B点右键选择启动动画,便可得到机构动画,其截图如图2所示。
2 曲柄滑块机构运动可视化
2.1 建立模型
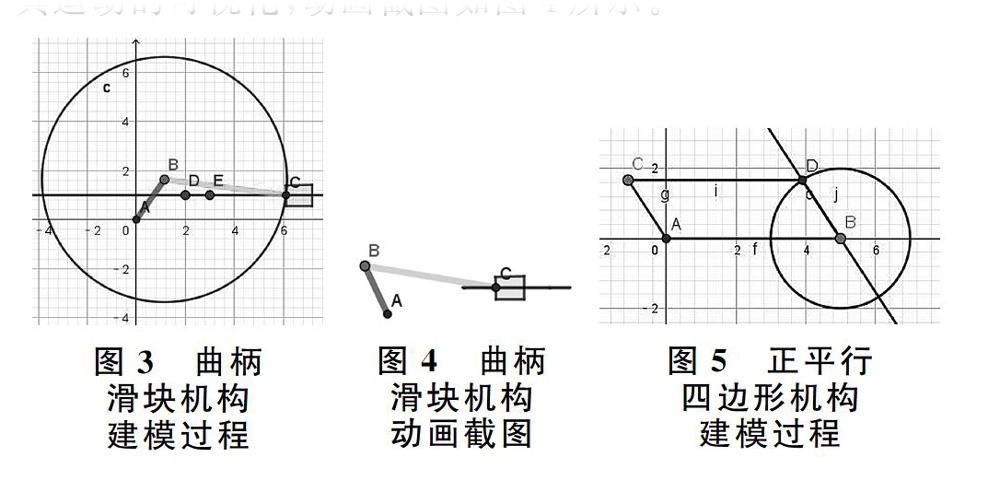
曲柄滑块机构建模过程如图3所示,其建模步骤为:
(1)绘制曲柄。用定长线段命令绘制曲柄AB,为便于绘图,此处A点取坐标原点,并取长度为2。
(2)绘制滑块运动中心线。在距原点上方为1处(即偏心距为1),用直线命令绘制直线DE作为滑块运动中心线。
(3)绘制连杆。用圆(圆心与半径)命令,以点B为中心,5为半径绘制圆,与直线DE的交点取为点C,用线段命令连接BC,得到连杆BC。
(4)绘制滑块。用刚体多边形命令绘制滑块。
2.2 动画演示
为使图面简洁和便于观察,隐藏辅助线、辅助圆、网格、坐标轴等,用轨迹命令显示滑块C点的轨迹,设置各杆的颜色和宽度。点击拖动B点或右键启动动画即可实现其运动的可视化,动画截图如图4所示。
3 特殊四杆机构的运动可视化
3.1 正平行四边形机构运动可视化
3.1.1 建立模型
正平行四边形机构建模过程如图5所示(保留了作图过程),其建模步骤为:
(1)绘制机架。用线段命令绘制机架AB。
(2)绘制主动曲柄。用定长线段命令绘制主动曲柄AC。
(3)绘制从动曲柄。用圆(圆心与半径)命令以点B为圆心、AC长度为半径绘制辅助圆,用平行线命令过B点作AC的平行线交辅助圆于点D。连接BD,即得到从动曲柄。
(4)绘制连杆。用线段命令连接CD,得到連杆。
3.1.2 动画演示
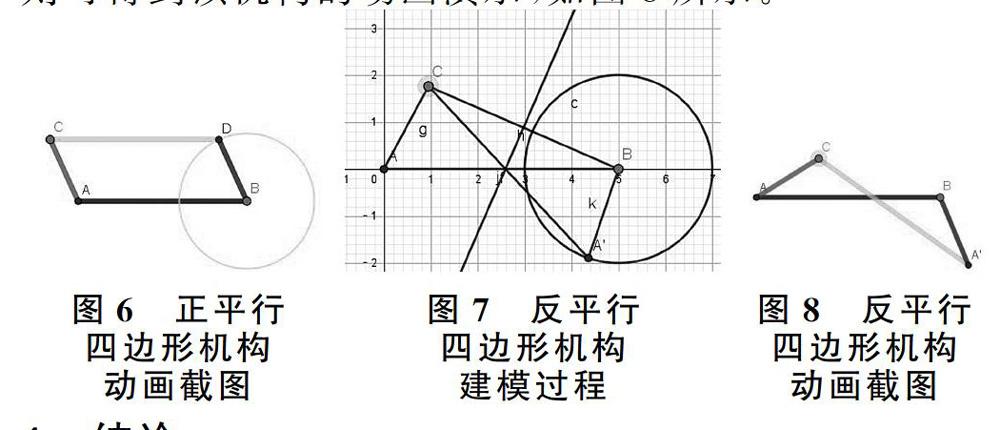
为便于观察,隐藏不必要的元素,设置各杆颜色和宽度,显示D点运动轨迹。点击拖动点C或右键启动动画,即可得到该机构的运动动画,如图6所示。
3.2 反平行四边形机构可视化
3.2.1 建立模型
反平行四边形的建模过程如图7所示,其步骤如下:
(1)绘制机架。用线段命令绘制机架AB,此处长度取5。
(2)绘制主动曲柄。用定长线段命令绘制主动曲柄AC,长度取为2。
(3)绘制连杆和从动曲柄。用圆(圆心与半径)命令,以点B为圆心、以2为半径绘制辅助圆,用线段命令连接BC,作线段BC的中垂线i,作点A关于中垂线i的对称点A,连接CA,得到连杆;连接A,B得到从动曲柄。
3.2.2 动画演示
隐去辅助线和辅助圆,隐藏坐标系和网格,设置各杆颜色和宽度。点击拖动点C或右击选择启动动画,则可得到该机构的动画演示,如图8所示。
4 结论
(1)借助GeoGebra实现平面四杆机构的运动可视化是可行的。
(2)通过GeoGebra实现平面四杆机构的运动可视化,其建模过程简单、高效,动画演示可实现交互。
(3)基于GeoGebra实现机构的运动可视化,可用于教学演示,虚拟样机验证或逆向工程等领域。
参考文献
[1]左晓明,田艳丽,贠超.基于GeoGebra的数学教学全过程优化研究[J].数学教育学报,2010,19(01):99-102.
[2]鮑莉.机械设计基础[M].郑州:河南科技出版社,2010.
