在线粒子群优化PMSM 无传感器控制研究
2019-10-25宋正强杨辉玲
宋正强,杨辉玲,肖 丹
(1.扬州市职业大学电气与汽车工程学院,江苏 扬州 225012; 2.新南威尔士大学电子与信息工程学院,悉尼 新南威尔士 00098G)
0 引言
目前,对计算机智能技术的应用研究已经在多个领域展开。该研究可用于进行永磁同步电机(permanent magnet synchronous motor,PMSM)电机参数或PID控制器参数的设计[1-9]。在这些研究工作中,粒子群优化(particle swarm optimization,PSO)方法[4]首次由Kennedy and Eberhart博士在1995年提出。该方法也是一种现代遗传算法。由于PSO方法的简单性和计算的有效性,其已经被广泛应用于大范围优化问题,例如控制器增益参数的自适应调节和系统参数的确定,以及设备的机械故障诊断应用[10]。然而,该方法在控制器参数优化应用中依然存在一些问题和限制。
本文提出一种在线实时粒子群优化方法,以调整速度和q-轴电流控制器参数。该方法可以使磁场定向控制下的内置永磁同步电机(interior permanent magnet synchronous motor,IPMSM)驱动系统获得更好的动态和稳态性能。同时,通过检测电机实际运行时的电流和速度值,建立多个不同的目标函数值。
1 自适应磁链观测器
自适应观测器建立在以d轴定向在永磁体磁链的转子d-q坐标系下[11]。本文所提出的用来估算转子速度和电流值的自适应观测器结构如图1所示。
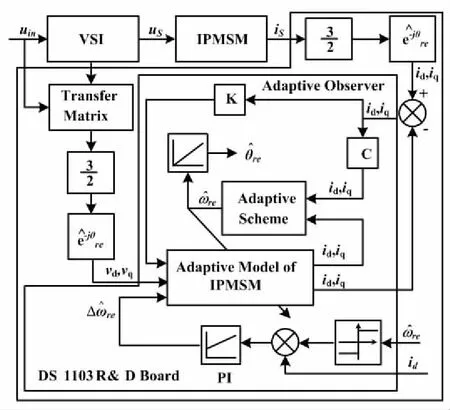
图1 自适应观测器结构图
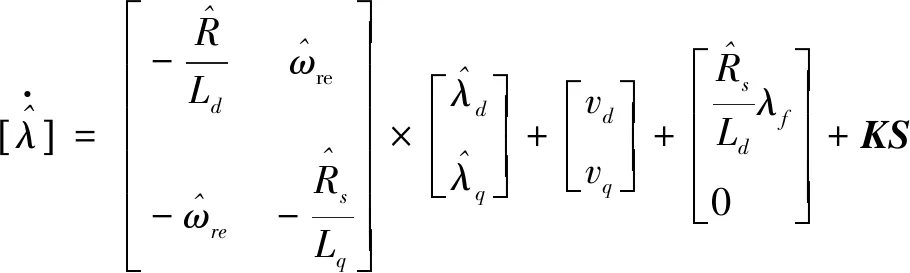
(1)
(2)
式中:符号^表示估算值;K为观测器的反馈增益;滑膜曲面矩阵S由定子电流误差所定义。
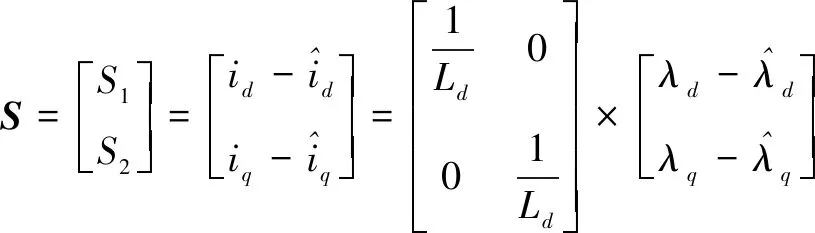
(3)
磁链估算值动态误差矩阵定义如下:
(4)
自适应模型输入量可以从李亚普稳定性分析中来获得,输出量为转子速度并用作自适应模型的主要修正量。
(5)
为了提高速度估算值的动态行为,引入一个比例控制器参数常量作为PI参数的初始估计值。
(6)
观测器增益矩阵K=k1I+k2J可以通过电机极点(实虚部)获得所需观测器极点,并通过平面坐标系下矩阵k(k>0 )推导获得k1、k2。
(7)
(8)
单采样周期内在线粒子群优化流程如图2所示。
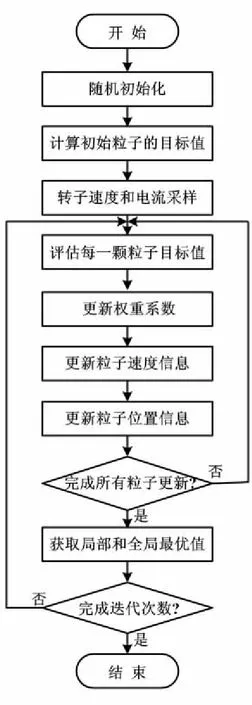
图2 单采样周期内在线粒子群优化流程图
在PMSM驱动系统无传感器控制方法中, 定子电阻的变化会降低系统的动态特性,并导致电机稳态运行时转子电流和位置的估算值与其测量值之间的误差增大。这一点也将引起无传感器控制系统的不稳定性。为了减少定子电阻变化对系统性能的影响,本文在自适应观测模型中引入一个速度修正量。该修正量是根据d轴电流误差变化推导所得,用来修正所估算的磁链值,进而提高观测器的准确性。
(9)
(10)
式中:Kp1和KI1分别为PI 控制器参数,用于产生因定子电阻值变化而需要的速度修正量。
2 控制器参数优化的在线PSO方法
2.1 PSO方法基本原则
PSO是由Kennedy and Eberhart在1995年提出的一种进化遗传算法。该方法通过不断迭代更新粒子群中每个粒子的信息,从而搜索到全局最优值。每个粒子都代表一种解决方法,且每个粒子都拥有各自的位置X和移动速度V。 位置矩阵X中的每一行都代表一个粒子的位置信息。通过位置信息,可以获得每个粒子的评估值。 在每次迭代中, 每个粒子的存储值都随着粒子的个体最优值(Pbest)和全局最优值(Gbest)的变化,不断更新粒子群移动速度V。
已知粒子群局部最优位置值和全局最优位置值后,粒子群的速度矩阵和位置矩阵将采用如下公式更新:
(11)
X(t+1)=X(t)+V(t)
(12)
式中:j=1, 2, …,m;g=1, 2,…,n;t和(t+1)分别为当前迭代次数和下一时刻迭代次数;参数c1和c2为加速度常数,用于调整粒子沿Pbest和Gbest飞行方向和位置的最大步子。
通常情况下,参数c1和c2设定为2,r1和r2为分布在(0~1)之间的随机数值。参数w为权重指数,并根据式(13)在运行过程中不断从0.9调整到0.4。另外,该算法很容易在早期的迭代过程中,从局部最优值逃逸出来,并且加速后面的迭代过程。这增加了寻找全局最优值的可靠性。
(13)
式中:wmax和wmin为w的最大值和最小值;itermax为迭代次数的最大值。
(14)

2.2 在线粒子群优化方法应用
现有的大多数PSO方法用在控制器参数调节或参数确定方面的研究工作主要是离线进行的[3]。在整个优化工程中,为了评估待求最优解,比如PI控制器的增益参数在整个系统仿真过程中保持不变,而同时输出误差(如速度误差)被不断累积计算用来评价待求最优解,通常PSO算法需要一系列不断迭代才能求得满意解。每迭代一次,系统模型被仿真一次。因此,系统模型需要被仿真许多次才能找到最优解。实际应用中,IPMSM驱动系统不断的重新启动是不被允许的,这就意味着仿真结果不一定能在实际系统中获得。
通常,一个采样周期只有10~100 μs,在一个采样周期内完成对每一个粒子所代表PI参数的评估是很困难的。因此,本文采用了新的在线粒子群优化方法,以不断更新粒子群的位置矩阵X和速度矩阵Y,粒子群的局部最优值Pbest和全局最优值Gbest将在30×10内更新完成。该方法在一个采用周期内检测速度和电流值作为采样值,然后更新当前粒子的速度和位置信息,而不是粒子群整体。IPMSM参数、控制器参数、控制系统参数分别如表1~表3所示。
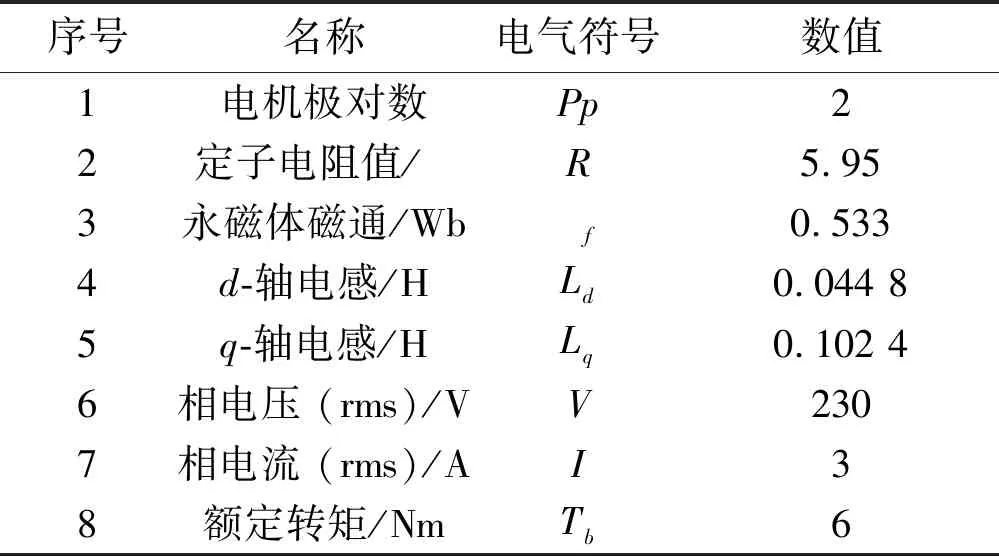
表1 IPMSM 参数
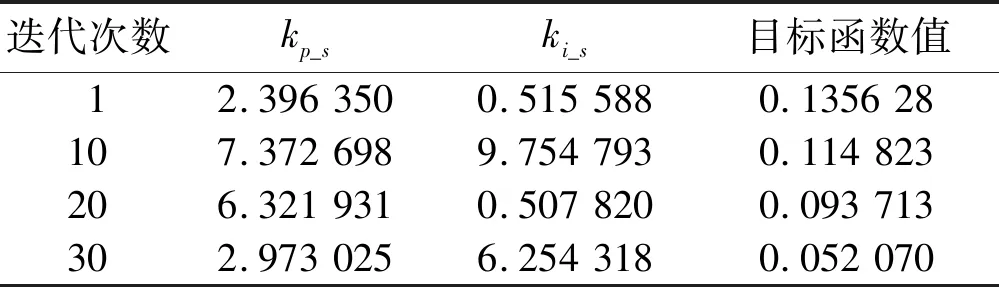
表2 控制器参数
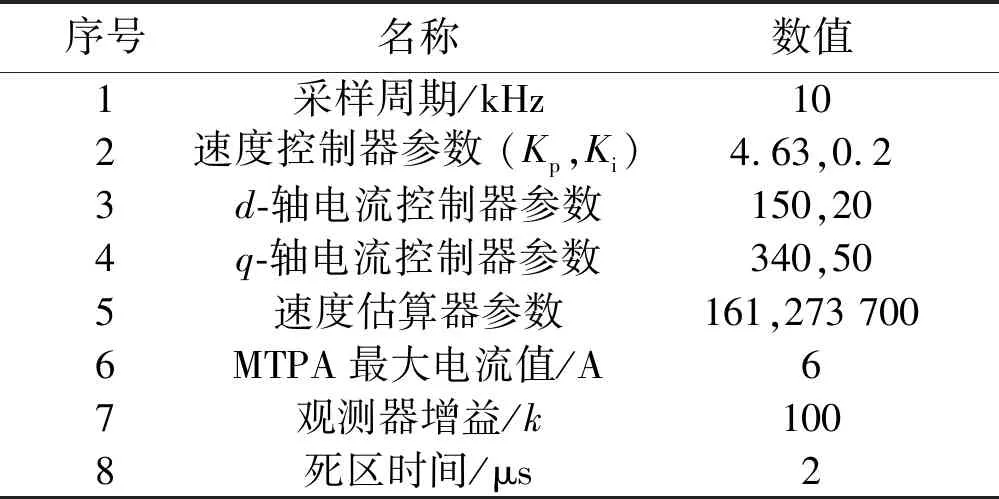
表3 控制系统参数
2.3 评价函数的定义
为了优化整个电机驱动的响应曲线,通过检测电机输出电流和速度值,定义评价函数是由多个性能指标并具有不同权重相加而获得的。具体公式见式(15)~式(18)。
(15)
f1=[ωre(k)-ωre(k-1)]2
(16)
(17)
(18)

3 粒子群优化离线仿真测试
本文首先在MATLAB/SIMULINK环境下进行模型的离线仿真,以检验无传感器磁场定向控制PMSM驱动系统的在线粒子群优化方法的性能。IPMSM的驱动系统基本参数由表1提供,控制器采样时间选定为100 μs。该数值和实际试验系统控制器采样保持一致。表2给出了控制器控制参数以及目标函数值,且PSO迭代次数为1、10、20和30。初始粒子群种群大小为30,且每一个粒子有两个变量 (kp_s,ki_s),分别代表搜索空间位置信息。经过30次迭代后, the results of Gbest将会作为优化后的结果更新,速度误差的目标函数值也将一步缩小。
根据IPMSM系统PSO优化过程中目标函数值的变化情况,可知其变化率很快。
为了测试本文所提的方法,将两种不同控制器(即传统的PI控制和PSO优化方法)应用在PMSM驱动系统中,并对两种不同控制器应用效果进行仿真比较。为了证明本文所提观点,阶跃响应指令和负载扰动分别提供给基于PSO调节的控制器和基于传统固定PI控制器参数,用来比较两种策略的控制效果。
4 实时在线仿真测试
本文所提出的无传感器控制方案通过DS1103建立实时在线仿真平台,通过PWM同步中断服务程序完成空间矢量调制策略和无传感器控制。另外,三相PWM信号可以通过DS1103预先设定死区时间来产生,三相电压源逆变器通过定时器I/O口和DAC通道检测三相PWM信号以及DC直流母线电压来产生。永磁同步直流电机单独由直流电源控制并提供测试系统需要的负载,并且负载可变化。试验中用到的嵌入式永磁同步电机参数和仿真模型中参数一致,由表1提供。
表3提供了控制系统参数,电压源开关频率设定为10 kHz,直流母线电压设定为340 V。
在测试中,观测器中定子电阻值在考虑补偿情况下变化。当电动机运行在大约200 r/min且带有63%额定转矩时,在三相电源输入侧突然切入3.4外部电阻。定子电阻的阶跃变化影响可以通过观测器中修正量在0.5 s内消除。电流和速度估算误差逐步减小到0,证明了采用修正后滑膜观测器与速度估算器相结合方法的有效性。
本文所提出的无传感器控制策略,在突加扰动和速度阶跃指令情况下的运行性能如下。在暂态运行时,速度估算误差被限幅器限定在±50 r/min范围内,并最终在稳态时收敛于零。
另外,突然将额定负载反向加载,将导致转子位置估算在暂态和稳态时分别产生误差。速度和q轴电流增益将通过PSO在线调整。另外,本文提供了建立在dq轴电流基础上的MTPA控制方法的效果。d轴电流指令通过q轴电流和最大电流计算获得。在暂态情况下,q轴电流指令保持最大值,而d轴电流保持为0。在稳态情况下,d轴电流变成负值,以产生所期望的转矩来克服负载转矩,并采用最小的电流幅值。
在本文无传感器控制策略中,利用PSO来动态调整PI控制器增益和固定PI控制器增益这两种方法:输入±750 r/min方波速度指令,并在稳态时突加±5 Nm负载在PMDC发电机端。两种控制方式性能对比如图3所示。
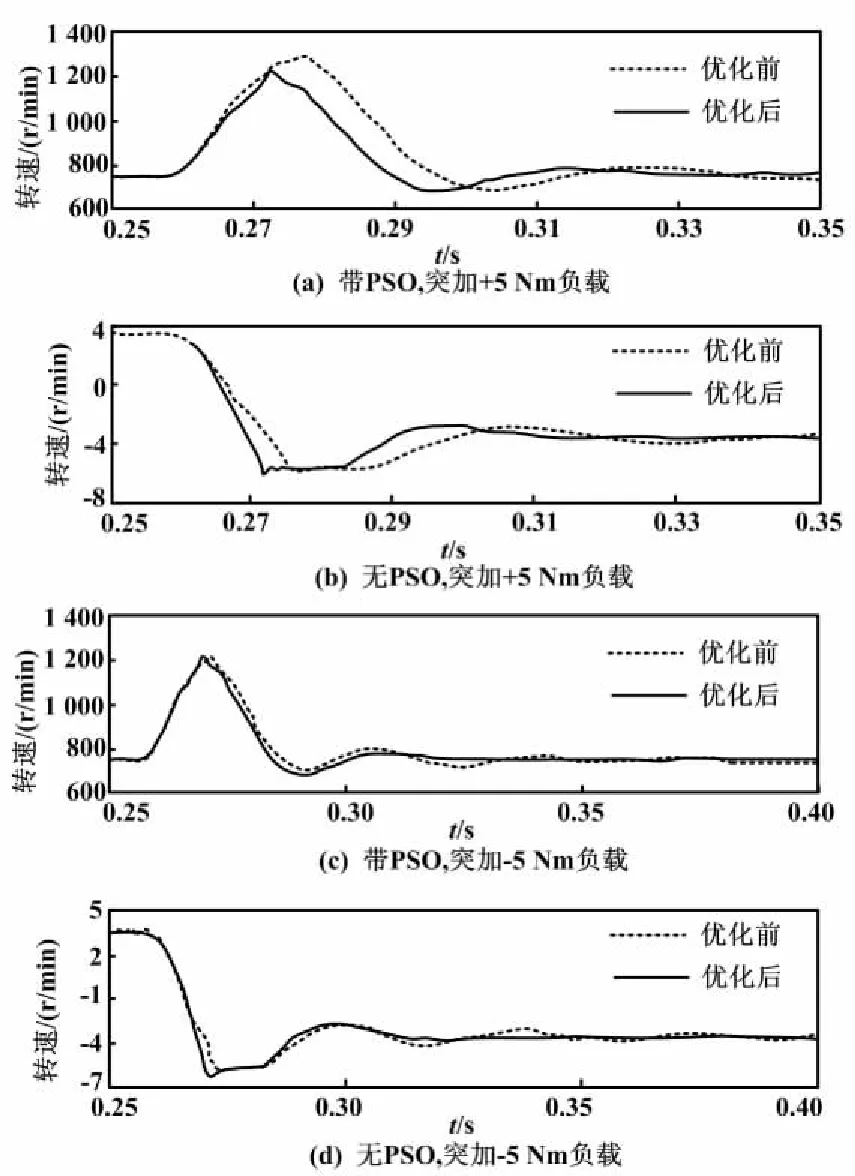
图3 两种控制方式性能对比
传统的PI控制方法中,控制器的参数是离线调整完成的,并将对应系统最佳状态时的PI参数固定下来。可以看出,固定PI参数和PSO在线调整PI参数方法,在通常情况下具有相似的速度和电流响应曲线。然而,利用PSO在线调整PI参数的方法还具有其他的优势,即当系统受到负载扰动时,该方法具有更小的超调量、更快速的响应以及较少的波动量。在传统的固定PI参数控制方案中,突加负载或负载突变时,系统的实际转速往往会偏离速度指令值很多。这一情况可以通过采用在线PSO调整PI参数的方法来减轻。
图3显示了在较高频通带情况下,PSO和固定PI两种方法的系统控制效果。为了增加控制器的带宽,速度增益参数赋予新的数值(Kp_spd=6,Ki_spd=0.27)。可以看出,当采用传统固定PI参数控制方法,手动调整赋予新的参数后,速度响应的超调量有所减小。然而,系统稳态响应中电流和速度波形中的抖动和脉冲有所增大,这将导致转矩波动,增加系统噪声并增大电机损耗。
5 结束语
本文提出了在线粒子群优化PI控制器参数的方法,并将其应用到PMSM无传感器磁场定向驱动系统中;同时,也考虑到了定子参数电阻值的变化对无传器控制系统速度估算的影响。其中,驱动系统的速度和电流控制器参数的优化和更新在一个采样周期内全部完成。试验证明,采用在线粒子群优化控制器的方法,使得IPMSM无传感器驱动系统无论在动态特性还是静态特性方面都优于传统PI控制方法。另外,定子电阻的变化也通过自适应观测器进行了补偿修正。
