基于FPGA的四旋翼无人机综合教学实验平台设计
2019-10-24陈家林包谛牛炯陈震
陈家林 包谛 牛炯 陈震

摘要:为加强对学生创新思维和综合创新能力的培养,融合自动化专业理论与实践技能,培养学生综合运用专业知识进行系统设计的能力,构建了基于FPGA的四旋翼无人机综合教学实验平台。该平台的设计与搭建融合了嵌入式技术、控制理论、基础电、数据采集处理技术、计算机控制等多门课程。运用模块化设计,在一个平台上实现多种实验内容的自由组合和分解,为学生提供了新的仿真和实践平台,完成了一体化综合教学平台设计,培养了学生的创新实践能力。
关键词:无人机;教学;创新;一体化
中图分类号:G642.0 文献标志码:A 文章编号:1674-9324(2019)39-0266-02
一、引言
无人机是一种体型较小、无人驾驶,能够在空中实现自主飞行并执行一定任务的飞行器。无人机与普通飞机相比,其结构简单、成本低,便于制造和维护。四旋翼无人机与普通无人机相比故障率低,并且在单位体积内能够产生更大的升力,适合在狭小的空间内执行任务。自主四旋翼无人机在远程侦察、监控、军事等领域具有巨大的优势。自动化专业现有的实验教学平台一般只侧重于对单一课程内容的实际操作,无法将所学知识作为整体在一个平台上集中应用,形成一个功能相对完整的自动控制系统。近年来随着无人机技术的不断发展,无人机开始应用于高校实验教学领域,使得自动化专业开始把无人机实验纳入各个高校的课程体系。上海交通大学以STM32系列ARM芯片作为主控芯片成功将四旋翼飛行器运用于实践教学,激发了学生的创新性思维,培养了学生对计算机控制和空气动力学的兴趣。中国石油大学基于Odroid开发了四旋翼无人机并构建了基于空中机器人的开放实验室,为培养学生的创新实践能力提供了良好的平台。四旋翼无人机是当今国内外各大高校的研究热点,属于自动化专业的前沿领域。具有涉及课程多、研究内容新、实用领域广等众多特点,对于培养学生的创新实践能力、验证理论知识等都是一个得天独厚的实验教学平台。
二、四旋翼飞行器实验平台设计
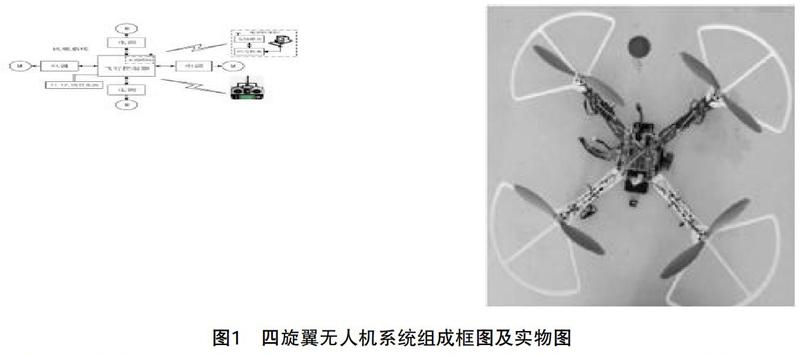
四旋翼无人机系统模块(图1所示)主要由以下几部分组成:飞行控制器、电调、无刷电机、螺旋桨、电池、地面控制站和无线遥控器。
四旋翼无人机主要依靠四组无刷电机驱动平衡4个螺旋桨产生的升力及力矩来实现稳定盘旋和精确飞行。通过无线遥控器手柄可以做出前后、垂直、倾向运动,或者通过飞行控制器实现自主飞行。四旋翼无人机采用对桨设计,任意相邻的两个桨叶分别为“顺时针+逆时针”旋转组合,这种组合有效地克服了单螺旋桨造成的自旋不稳定效应,保证了无人机平稳流畅飞行。以四旋翼无人机为平台结合不同的应用功能模块,进行二次开发可以实现不同的功能,包括航拍、运输、搜救等。
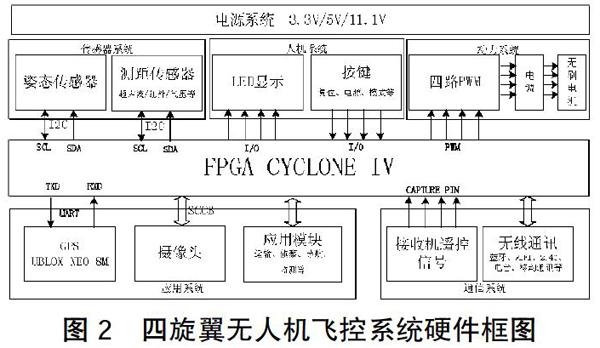
1.硬件系统。四旋翼无人机飞控系统的硬件框图如图2所示,主要由七部分构成,包括主控制器、传感器系统、动力系统、人机系统、电源系统、通信系统和应用系统。
2.软件系统。四旋翼无人机飞控软件系统设计如图3所示,主要包括驱动层、分析层、控制层和应用层。无人机软件系统集成了加速度计、陀螺仪、地磁传感器、气压计等各类传感器驱动。飞控系统将无人机的姿态、高度等状态信息实时传递给软件分析层进行分析、解算和定位,无人机控制层进行飞控算法处理和运算协调,无人机四个直流无刷电机保证无人机的飞行姿态。软件系统通过应用层使无人机应用于各个领域。
为了使学生能够更容易地实时监测飞行器的各个状态信息,同时便于进行无人机的调试,需开发无人机地面控制上位机。在通过上位机观察信息并调节控制参数的过程中,学生能够实时得到检测数据,能够激发学生的学习动力,增强实验的趣味性。
三、实践教学
自动化专业具有多学科交叉、内涵丰富、注重实践的特点,实验在自动化专业中起着关键作用。四旋翼无人机具有涉及课程多、研究内容创新、实用范围广等特点。在嵌入式技术、控制理论、数据采集与处理、基础电等自动化课程群中都有实践应用,同时在大学生电子设计竞赛、智能车竞赛、机器人大赛等各类创新比赛中也有无人机项目,如图4所示。
四、结束语
基于FPGA的四旋翼无人机综合教学平台结合了自动化专业多门专业课,仅可以让学生将课本中所学的理论公式、定理运用于实践中,在巩固理论知识的同时提高了创新能力、动手实践能力以及团队协作能力,而且能够培养学生综合运用专业知识进行系统设计的能力,掌握自顶向下的设计方法。
参考文献:
[1]蔡健.各国无人机应用及发展概览[J].中国安防,2016,(9):91-103.
[2]罗偲,纪仁杰,韩彬,等.基于Odroid的四旋翼无人机教学平台设计[J].实验技术与管理,2016,33(11):165-167.
[3]余昌叶.基于嵌入式系统与机器视觉的小飞机控制平台设计与实现[D].哈尔滨工业大学,2014.
[4]杨希祥,郭正.依托浮空无人飞行器培养学生创新实践能力[J].实验技术与管理,2015,32(11):8-10.
Integral Experimental Platform Based on the Quad-rotor UAV with FPGA Control
CHEN Jia-lin,BAO Di,NIU Jiong,CHEN Zhen
(Engineering College,Ocean University of China,Qingdao,Shandong 266100,China)
Abstract:In order to strengthen the cultivation of students' innovative thinking and comprehensive creativity,to cultivate students' abilities of using professional knowledge to do system designing combing with the automation theories and practical skill,an integral experimental platform based on the quad-rotor UAV with FPGA control is constructed.The design and construction of this platform integrate embedded technology, control theory,analog and digital circuits,data acquisition and processing technology, computer control and other courses.With this integrated teaching platform, various experiments can be given through module combination or decomposition according to modular design,which provides new simulation and practical environment to students and can cultivate the innovative practical ability of students.
Key words:UAV;teaching;innovation;integration
