智能控制课程中英双语教学方法研究与教学案例设计
2019-10-23付东翔傅迎华
尹 钟,陈 玮,付东翔,傅迎华,孙 红
(上海理工大学 光电信息与计算机工程学院,上海 200093)
0 引 言
由于智能控制技术融合了控制论、自动化技术和人工智能科学等诸多重要知识[1],智能控制课程在智能科学与技术专业本科培养计划中占有重要地位。一方面,该课程帮助学生有重点地回顾了自动控制系统的基本结构、功能原理和性能指标;另外,学生可从多种智能理论体系(如模糊推理系统、机器学习、进化计算等[2])了解人工智能方法在控制问题中的具体应用案例,学习解决复杂、时变、不确定输入输出过程的数据驱动建模和控制器设计问题[3]。
智能控制课程内容涵盖范围较广、应用场合多,由于课时数受限,教师可能无法详尽解释个别理论方法的内在机理。学生需在课后查阅相关参考文献,或在研究生学习阶段学习进阶课程。在此过程中,学生将不可避免地接触英文文献和教材。为了提高学生在课后独立阅读中英文资料的效率,教师需帮助学生准确掌握不同智能控制方法原理的双语表述和概念思想。具体来说,教师需在采用易于理解的中文课程教材授课的同时,将针对具体方法的国际优秀教材作为补充,设计切实可行的智能控制课程双语教学方法,帮助学生高效且精确地掌握授课内容,为进阶学习打下牢固基础。
考虑到大学英语教学内容并未完全涵盖智能科学涉及的技术英语,智能控制课程的中英教学方法可先采用较为保守的“中文为主、英文为辅”模式,在教授过程中循序渐进地提高/降低英文内容的所占比例。这种双语教学模式的特点和新意在于,授课内容的中英文比例或知识结构特点可随学生的学习效果自适应调节,其难点在于,中英文授课内容比例的精确量化和教学效果的定量评估的实现。为了研究双语教学方法中的这两个问题,需设计有代表性的案例进行验证。从上述动机出发,笔者在以往教学和文献阅读工作的基础上[4],针对智能控制课程,探索了切实可行的中英双语教学模式,针对关键知识点设计了可评估授课效果的教学案例,并将其运用于教学实践环节。
1 自适应双语教学方法框架设计
图1 为智能控制课程自适应双语教学方法框架,目的是针对本科三年级学生的平均数学、英语、编程水平。首先,基于中文教材和教学大纲,依据不同章节的授课内容确定合适的英文教材,保证中英术语严格准确地对应。表1 列举了不同章节对应的英文教材信息和适用知识点。第二步,利用分治策略,针对具体授课章节,设计切实可行的教学案例,案例包括理论授课和上机实验两个环节。对于前者,双语模式可帮助学生掌握智能控制技术中文术语的英文表达;对于后者,该模式可辅助学生理解相关智能算法的运行原理和编程命令。第三步,教学实践并评估不同授课章节的教学效果。最后,通过学期期末考试成绩,评估当前中英文授课比例下教学模式的效果,优化教学方法。
图1 展示了智能控制课程自适应双语教学方法的框架结构,其流程包含一个前馈路径和两个反馈回路。首先,基于制定的中文教材,分析智能控制课程知识结构;再依据表1 确定模糊推理系统、专家系统、递阶控制、神经网络等章节分别对应的英文参考书目;之后,基于教学大纲选择一个授课知识点,备课并设计相关教学案例,进行教学实施,评估章节授课效果;此时,需分析反馈局部授课效果,改进中英文内容比例,同时,选择下一个知识点,继续上述流程;当学期结束时,分析考试成绩,作为评估学期内整体授课效果的基础,基于这些反馈信息改进双语授课案例、实验案例、教学实施方法等细节,为下一学年教学工作做准备。
2 双语教学案例设计
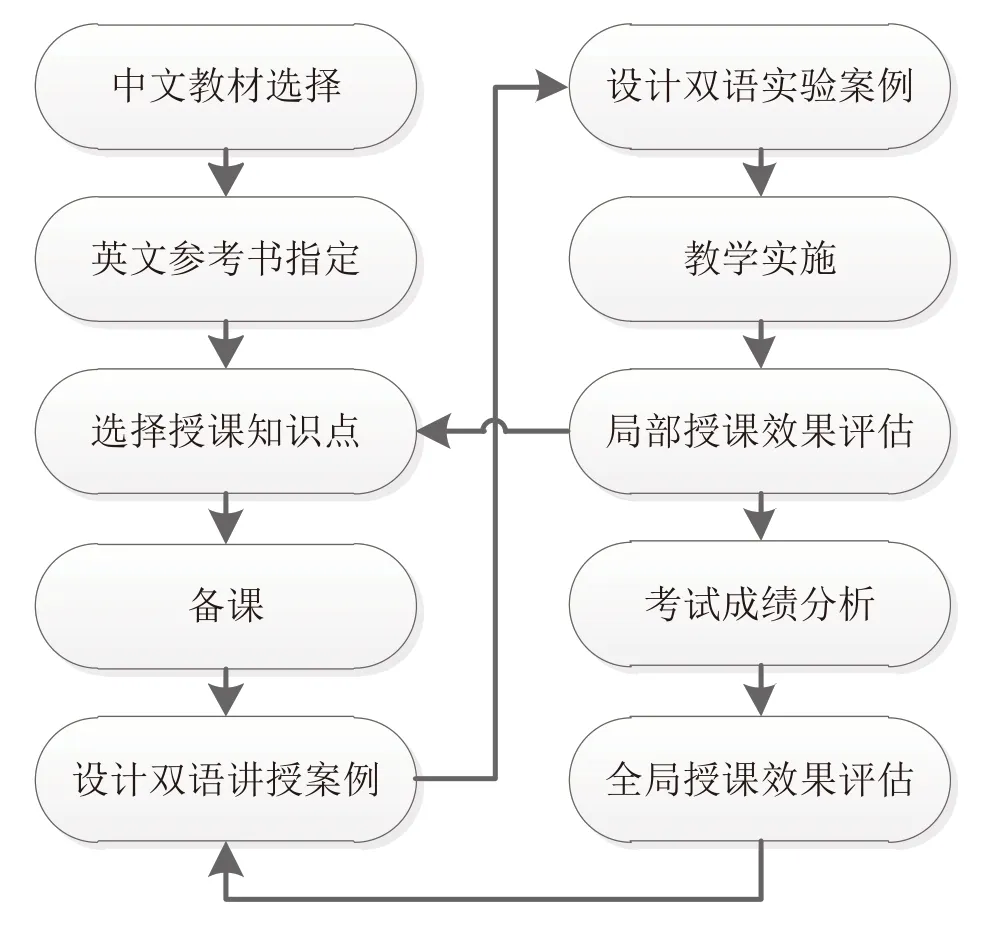
图1 智能控制课程自适应双语教学方法框架结构图
以智能控制课程人工神经网络章节的部分内容为例,基于感知器和多层感知器知识点分别设计了两个讲授案例和两个上机实验案,见表2。针对双语内容,案例1 帮助学生掌握感知器(组成前馈神经网络的基本元素)的相关中英文术语;案例2 在此基础上引入感知器训练算法,帮助学生掌握机器学习模型评估指标的术语;案例3 引入多层感知器误差逆传播算法,帮助学生掌握链式法则、梯度、最小二乘法等术语的英文表达和描述,同时引导学生阅读多层感知器模型的误差逆传播算法程序;案例4 以鸢尾花和MINST 手写体数字识别数据集为基础,引导学生调研文献中该问题的历史最优识别精度,提高英文资料的检索和阅读理解能力。

表1 智能控制课程知识点对应的中英文教材和参考书选择

表2 感知器和多层感知器知识点双语教学案例设计
2.1 课堂讲授案例
借助表1 中智能控制教材第五章节、神经网络章节参考书第一章节“Rosenblatt 感知器”设计了案例1 和案例2 的授课内容。
案例1 包括以下3 个主要模块:①感知器模型的基本结构描述,图2 展示了可视化该结构的双语幻灯片示例,学生需先复习线性代数课程中关于标量、向量的基本概念,学习突触权值、偏置、诱导局部场等双语术语,最终理解感知器模型的前馈计算流程;②激发函数的类型,学生需学习多种激发函数的中、英文、数学描述,熟悉其输入输出特性,图中展示了经典的对数S 形激发函数;③课堂提问和随堂练习,布置基于指定输入数据,计算感知器输出的习题,供学生完成。
案例2包含3个主要模块:①二类线性可分和线性不可分问题,向学生展示感知器只能处理线性可分问题,同时学生须学习形如“训练(train)”“子空间(subspace)”“算法(algorithm)”等双语术语;②详述感知器收敛算法(Perceptron convergence algorithm)的基本步骤,帮助学生准确理解该算法的证明过程和计算流程,熟练阅读基于英文的伪代码;③学习机器学习模型评估指标,使学生掌握“精度(accuracy)”“灵敏度(sensitivity)”“特异度(specificity)”等术语和概念;④随堂练习和研讨,引导学生尝试编写能自适应学习率的算法伪代码,并相互交流。
2.2 上机实验案例
基于神经网络参考书第四章节“多层感知器”设计实现案例3、4的内容。
学生通过对案例1、2 的学习可掌握人工神经元的基本结构。在此基础上,案例3 引入多层感知器,并向学生演示训练算法——误差逆传播算法。本教学内容依托MATLAB 平台实现。学生需先掌握该算法的推导过程,其部分内容见图3。神经网络的训练过程可看作最小化误差信号e(n),利用最小二乘思想求取瞬时能量误差e(n),继而利用链式法则计算灵敏度因子,从而获得与调节突触权重w(n) 相关的梯度方向。学生在此阶段需掌握该数学推导流程中使用的术语。之后,帮助学生利用其结论编写前馈多层感知器的训练程序,在此过程中教师将现场演示示例程序的实现流程,并为每行语句添加中英文注释。课后,学生需递交实验报告和可阅读的程序代码。

图2 感知器模型结构幻灯片示例
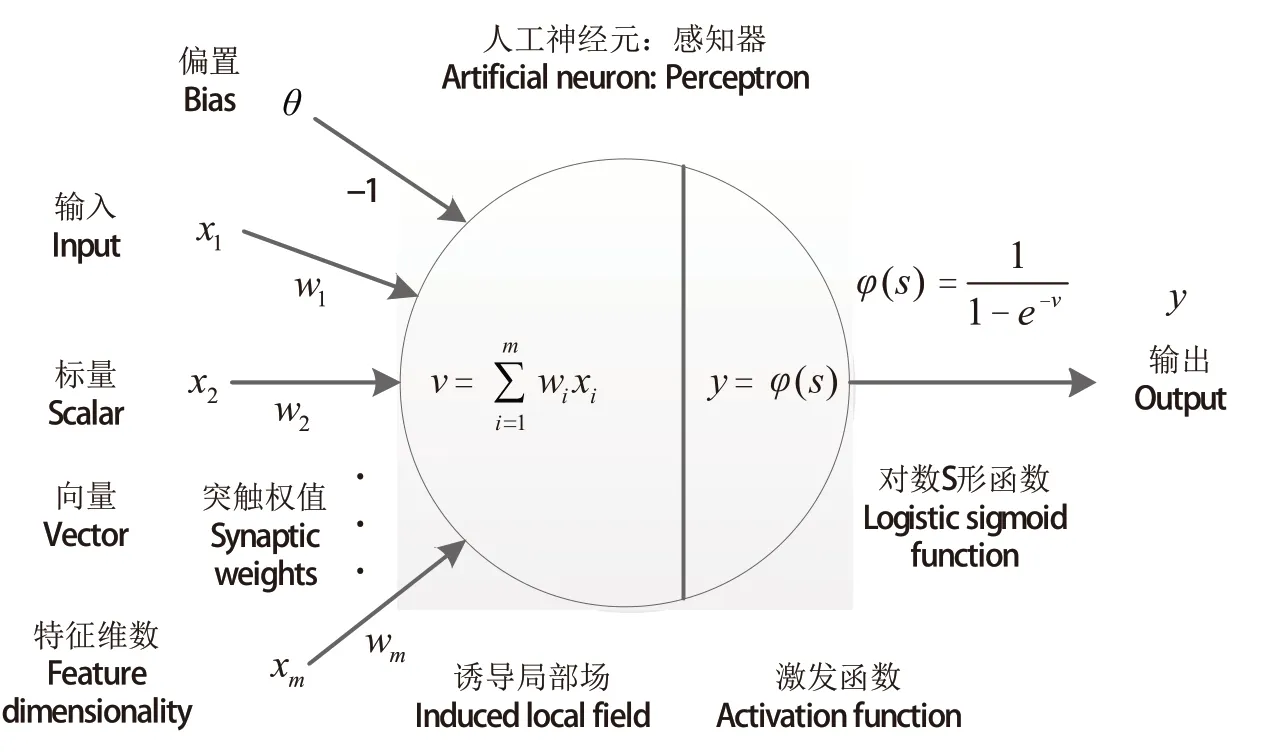
图3 误差逆传播算法实现过程幻灯片示例
案例4 中,学生将鸢尾花和MINST 数据应用于案例3 的程序,尝试基于单隐层前馈神经网络实现有监督模式识别。图4 展示了一个实验结果示例,其中,学生需研究多层感知器隐层节点个数和输入数据噪声水平同时提高时,测试识别精度的变化趋势。可见,随隐层节点增加,模型泛化能力下降,而噪声水平并未显著影响精度变化。最后,帮助学生分析实验数据——多层感知器虽对噪声有一定的“滤波”能力,但由于训练数据有限,过于复杂的模型结构易导致过拟合问题。
3 教学实施与总体评估
依据提出的教学方法和教学案例,针对智能控制课程“神经网络”章节设计了相应教学模块,并将其应用于上海理工大学2015 级智能科学与技术和测控技术与仪器专业的智能控制课程。为了初步试验所实施教学方法的有效性,笔者仅在神经网络、模糊推理系统和学习控制章节采用了双语教学方法。在教学实施过程中,大部分学生对理解双语内容并无明显障碍,能较好地掌握大部分英文术语和重要概念描述,在讨论环节表现出更高的参与度。表3 展示了两个班级学生的期末考试成绩,其中试卷难度无显著性差异。笔者统计了所有选课的13 名2015 级学生(均为智能专业)和认真出席课程的13 位2014 级学生(9位智能专业、4 位测控专业),并将成绩由高至低排序。

图4 案例4 实验结果示例:iris 数据集测试精度随输入噪声强度与隐层节点个数变化趋势
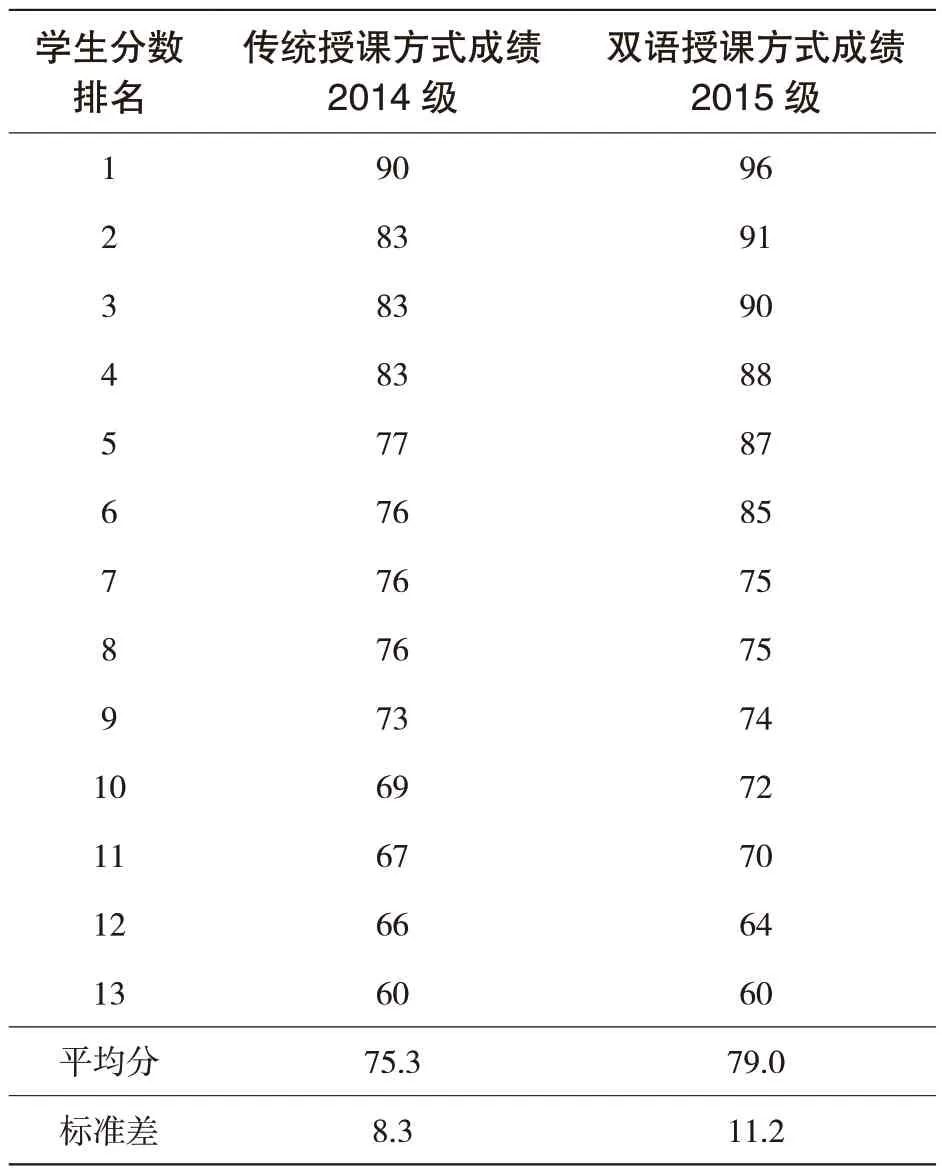
表3 传统授课方式和双语授课方式成绩对比
从表3 中可见,采用双语授课方式的2015级学生得分更高。采用威尔科克森(Wilcoxon)符号秩检验发现,该成绩提升显著(p< 0.05)。另一方面,学生成绩的标准差略微升高,其潜在原因在于当前授课模式未能适应个别学生的听课习惯。因此,可在下一学年的授课环节略微降低双语授课内容比例,提高讲授环节幻灯片的可读性,优化学生的认知负荷,进一步提升双语教学效果。
4 结 语
该方法在实际教学实施中帮助学生掌握关键知识点,使学生取得了较高的期末考试成绩。值得指出,少部分学生对英语授课内容的接受度不高,导致其在双语学习教学模式下的学习效能下降。因此,该方法仍需通过多个学期的教学实施,更仔细地改进和优化。在未来的工作中,可对学生的评教分数和课堂问卷指标统计分析,探究双语内容的最优比例和搭配方式,进一步挖掘该方法的潜力。
