分层规则式混动客车再生制动控制策略研究
2019-10-21李子龙李梦园
李子龙 李梦园
摘 要:混动客车的再生制动技术是提升其经济性的主要技术之一。但是,如何与传统的液压(气压)制动系统相结合,同时保证整车稳定性和最优经济性仍然是一个亟待解决的难题。针对该难题,提出了一种基于滑移率的分层规则式再生制动控制策略。首先搭建了一个7自由度纵向动力学模型;然后基于前后轮的滑移率设计了常规、过渡和紧急制动三层控制策略,最后对该控制策略进行了模型仿真实验,实验结果表明在保证整车安全性的同时,该策略相对于标准工况下常规的再生制动策略,能够提升15%的制动回收能量。
关键词:混合动力客车;分层规则式;再生制动控制
中图分类号:TP29文献标识码:A
随着我国汽车总量逐渐增多,传统汽车所带来的环境污染和资源短缺问题也日益严峻 [1,2]。针对该问题,节能环保的电动汽车技术成为主流发展车型。
1 绪论
针对电动汽车制动过程中的再生制动系统控制问题,国内外学者已经做了大量的研究。
张俊智等以混动城市客车为研究对象,设计了一个新型再生制动系统,并提供了其相应的控制策略,[2]并针对串联式混动客车,设计了多种控制策略,并对这些策略进行了道路测试实验验证。[3]
童毅等基于并联式混动汽车,提出一种转矩管理和协调控制策略,并通过DSPACE设备对该策略的有效性进行了实时仿真验证。[4]
针对制动能量回收问题,罗禹贡等人基于最优控制理论,设计了再生制动控制策略,[5]詹讯等分析了混动汽车在城市环境下的行驶特点,设计了一种规则式制动力分配策略,[6]并对其进行了仿真验证。
杨阳等基于混动汽车,设计了其综合制动系统,并基于AMESim仿真软件建立了仿真模型,通过该模型对系统方案的有效性进行了验证,[7]刘清河等人在传统汽车制动系统基础上,设计了一种电机制动和液压机械制动的并行系统构型,并基于该构型提出了集成制动控制策略。[8]
基于电动汽车,郭洪强等[9]综合考虑制动能量回收效率与车身行驶稳定性,设计了基于二次再分模型的优化控制策略。郭志军等[10]在考虑制动力安全分配区域与法规的前提下,设计了基于模糊逻辑的再生制动控制策略。
李强等基于路面附着系数识别,设计了一种再生制动控制策略,在综合考虑路面情况下,尽可能的回收制动能量[11]。秦大同等考虑了电池,电机和变速器的综合效率,设计了无级变速器速比控制策略,并基于该策略,制定了兼顾驾驶意图和能量回收效率的再生制动策略[12]。何耀等[13]将电机和电池的限制因素考虑在内,提出一种信息融合架构和基于该架构的再生制动控制策略。
基于上述调研,本文针对同轴并联混合动力客车构型,提出了一种基于滑移率的分层规则式再生制动控制策略。
2 整车模型
基于同轴并联机电传动系统,本文提出了一种基于滑移率的分层规则式再生控制策略。
混动客车的制动系统由气压机械制动系统和再生制动系统组成,本文所选择的气压制动系统为电控系统,其中前后轮的轮缸气压可以实现独立控制[14]。
为了验证所提出的控制策略,建立考虑纵向行驶动力学和悬架的七自由度整车动力学模型,传动系统的其它部件模型如电机发动机模型等可以参考文献14[14]。
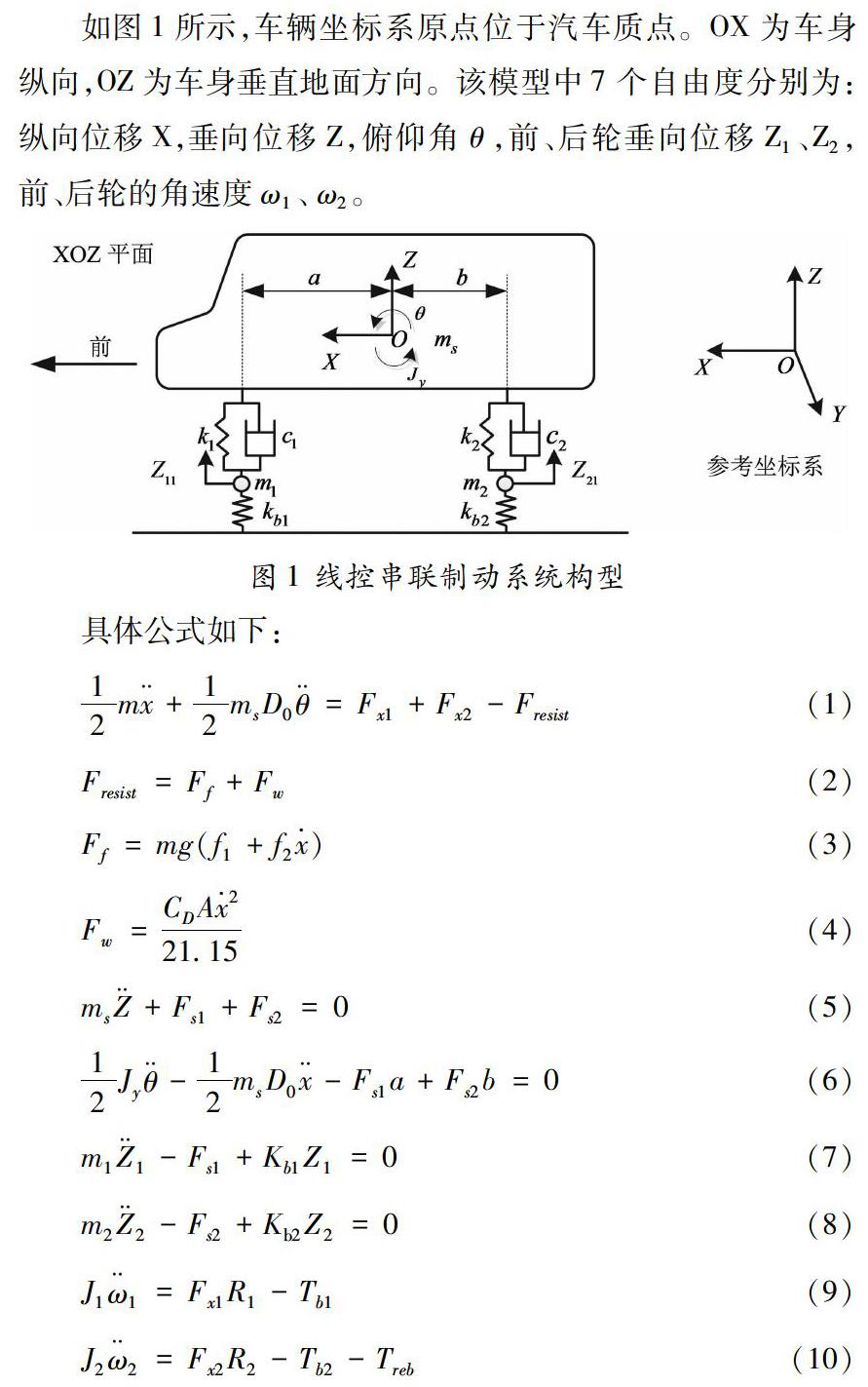
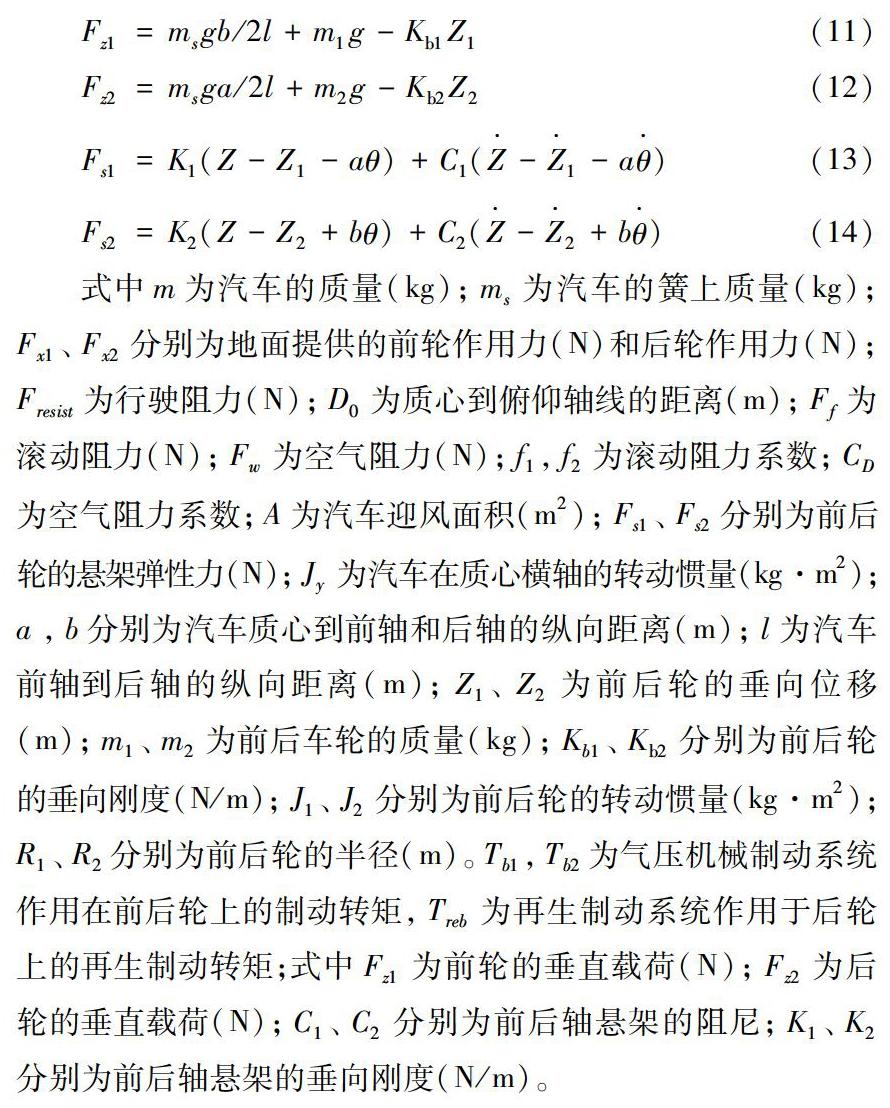
如图1所示,车辆坐标系原点位于汽车质点。OX为车身纵向,OZ为车身垂直地面方向。该模型中7个自由度分别为:纵向位移X,垂向位移Z,俯仰角θ,前、后轮垂向位移Z1、Z2,前、后轮的角速度ω1、ω2。
3 基于滑移率的分层规则式再生制动控制控制策略
针对串联式混合制动系统,多数规则式控制策略是单纯基于驾驶员制动需求对前后轴上的制动力进行成比例的分配,本文提出一种基于滑移率的多模式规则式再生制动控制策略,基于前后轮滑移率将制动情况分为三个层级,并在每个模式中设计了相应规则,以达到在保证整车安全性的同时提升制动能量回收效率的目的。
如图2所示,图中滑移率为前后轮滑移率较大者,d为考虑了制动减速度导致的负载转移后的前后轮负载比例。
常规制动层,当前后輪的滑移率均小于L1时启动常规制动层,在该层控制策略的主要目的是回收制动能量,此时驾驶员制动需求首先由电机的再生制动力提供,若再生制动力不足以满足制动需求,则由前后轮气压机械制动力补充。
过渡制动层,当前后轮滑移率至少有一个超过L1,但均未超过L2时过渡层启动,在该层控制策略的主要目的包括回收制动能量以及尽可能的不触发防抱死模式,前后轮制动力的分配比例由后轮滑移率决定,如图所示,后轮滑移率越大,后轮制动力的分配比例越小,最后前后轮的分配比例接近其前后轴上的负载比例。同样,分配的后轮制动力首先由再生制动力提供,当再生制动力不足以满足要求时,由气压机械制动力补偿。
紧急制动层,当前后轮滑移率至少有一个超过L2时启动紧急制动层,在该层控制策略的主要目的是将滑移率控制在最优滑移率附近,防止车轮抱死,保证整车的制动效能和安全性,如图3所示,此时对前后轮分别设计PID控制器进行控制,以目标滑移率和当前滑移率的偏差为输入,以基于当前制动力的修正制动力为输出,对于后轮,利用电机响应较快的特点,尽可能让气压机械制动系统提供基本制动力,再生制动系统在此基础上提供需要快速响应的修正制动力。
4 仿真结果分析
为了验证所提出控制策略制动安全性以及能量回收效率,本文以并联式混合制动系统的基本控制策略为基准策略,[3]进行了仿真对比实验。
制动能量回收效率的仿真工况设置为中国国家标准工况,驱动过程采取的是常用的基于规则式策略[14]。
仿真结果如图4,5所示,在图(a)中可以看出,两种策略的车速跟随效果都很好,实际车速和期望车速几乎重合。如图(c)所示,由于整个工况没有紧急制动情况,所以车轮滑移率在0.1以内,符合安全性的要求。最后如图(d)所示,基准策略回收制动能量为4702.2kJ,而本文所提出的控制策略回收制动能量为5406.8kJ,相对于基准策略提升15.19%,从而验证了提出的策略的制动能量回收效率。
5 结论
本文提出了一个基于滑移率的分层规则式再生制动控制策略。首先,綜合考虑悬架特性及行驶过程负载转移,建立了7自由度整车纵向动力学模型;其次,基于前后轮的滑移率,设计了分层规则式再生制动控制策略;最后以并联式混合制动系统的制动策略为基准控制策略,对所提出的控制策略做了仿真对比试验,仿真实验结果显示在国家标准工况下,分层规则式再生控制策略能够在保证安全性的同时,提升15%的制动回收能量。
参考文献:
[1]科学技术部.这十年——现代交通领域科技发展报告[M].北京:科学技术文献出版社,2012:6-62.
[2]张俊智,薛俊亮,陆欣,等.混合动力城市客车串联式制动能量回馈技术[J].机械工程学报,2009,45(6):102-106.
[3]张俊智,陆欣,张鹏君,等.混合动力城市客车制动能量回收系统道路试验[J].机械工程学报,2009,45(2):25-30.
[4]童毅,欧阳明高,张俊智.并联式混合动力汽车控制算法的实时仿真研究[J].机械工程学报,2003,39(10):156-161.
[5]罗禹贡,李鹏,金达锋,等.基于最优控制理论的制动能量回收策略研究[J].汽车工程,2006,28(4):356-360.
[6]詹讯,秦大同,杨阳,等.轻度混合动力汽车再生制动控制策略与仿真研究[J].中国机械工程,2006,17(3):312-324.
[7]杨阳,刘松,秦大同,等.ISG型混合动力汽车制动系统仿真分析[J].重庆大学学报,2009,32(7):752-756.
[8]刘清河,孙泽昌,王鹏伟,等.电动汽车电液并行制动系统研究[J].汽车工程,2008,30(6):527-530.
[9]郭洪强,何洪文.电动汽车复合制动预测模型[J].吉林大学学报,2015,3:696-702.
[10]郭志军,岳东东,聂彦鑫.纯电动汽车再生制动控制策略研究[J].机械设计与制造,2018,1(1):173-176.
[11]李强,雷国建,陶华堂.回馈能量可控型再生制动控制策略研究[J].电气传动,2017,47(1):13-17.
[12]秦大同,林旈培,胡建军,等.基于无级变速器速比控制的插电式混合动力汽车再生制动控制策略[J].吉林大学学报(工学版),2018,48(2):380-386.
[13]何耀,邱振华,刘新天,等.信息融合架构下的新型再生制动控制策略研究[J].控制与决策,2018,33(7):1231-1238.
[14]张渊博.混合动力客车制动能量回收模型预测控制策略研究[D].河北:燕山大学,2017.
