一种船模位置控制系统设计
2019-10-21张学斌
张学斌

摘 要 针对试验水池,为获取海水中的电磁场分布,设计了一种基于变频器控制的船模位置系统,实现船模三轴向的高精度运动控制,较好地满足试验需求。
关键词 船模; 变频器; 位置控制; 速度精度
Abstract Aiming at a test water basin which could get the distribution of electromagnetic field in water, a ship-model position control system has been designed based on inverter, which could meet the high-precision motion control of ship-model on three axial directions, and the requirement of test.
Key words ship-model; inverter; position control; velocity precision
0 引言
船模位置控制系统是船舶性能试验的基本设备,其作用是拖曳船模或其他模型在试验水池中作匀速运动,以测量速度稳定后的船舶性能相关参数,达到预报和验证船型设计优劣的目的。设计、建造一艘现代舰船周期长、耗资巨大,因此在建造前的设计中,伴随着不同的设计阶段,根据不同需要做相应的模型试验是必要的[1]。通过利用水中目标的下半空间的磁场测试技术,反演推算整个目标空间的磁场分布[2]。为实现船模的位置控制精度及运动平稳性,通常在行车拖动系统中加入变频器改造达到优化动态性能,降低功耗和降低故障发生率的目的[3-4],或在拖动系统中通过添加PI控制有助于改善电机拖动系统的动态特性[5],或利用变频器直流制动功能实现大惯量交流拖动系统准确停车控制的设计方法[6]。
本文通过对试验水池进行改造建设,拟测量出船模在池底运动中的電磁场分布情况,因此建立低磁性与电绝缘性船模位置控制系统,实现船模的高精度位置控制和速度运行要求。船模位置控制系统主要由低磁导轨、驱动电机组成的拖车系统及控制平台等组成,导轨分为前后方向的运动导轨和左右方向的运动导轨,驱动电机和滚动轮执行机构实现拖动系统四个方向的运动,上下方向的运动由直流电机驱动牵引绳升降实现。控制平台实时获取船模的位置信息,根据位置和速度指令驱动电机实现运动。
1 系统设计
1.1 导轨设计
前后方向运行导轨固定安装于池壁,主要承载拖车系统和船模的重量。左右方向的运动导轨为固定安装在前后向运动机构上,主要承载左右运动机构及船模的重量。上下行程的四根导柱限定船模升降及运动中的方向。船模位置控制系统中拖动系统结构示意图如图1所示。
1)前后向导轨
前后方向导轨采用不锈钢方管型材铺设,满足结构强度的同时减少系统磁性的干扰。根据各部分的结构组成,总负载为2000 kg,左右双侧共有8个滚动轮承力,每个轮上对导轨的压力约为250 kg,通过计算最大变形量约2.65×10-3 mm,变形量较小,符合设计要求。前后向导轨变形量计算如图2所示。
2)左右向导轨
左右向导轨采用不锈钢槽钢和不锈钢方管拼接而成,横截面结构如下图3所示。
水池宽度为5000 mm,设计的横梁长度l=5648 mm,截面惯性矩I=2.97e+8 mm4,载荷主要为船模重量及横梁自重,约1000 kg。当承重处于最大值位置时,通过计算得横梁变形量为0.81 mm,形变量满足使用要求,计算示意图如图4所示。
3)导柱
根据实际行程的要求,为减少电机对水池底部的磁性干扰,上下向运动电机与左右向电机固连布置于横向导轨上方,通过导柱和牵引绳形成上下方向的位置控制,导柱长度为3200 mm,根据船模形状、尺寸和安装位置,同时为保证船模运动中的稳定性要求,导柱设计为四根。导柱竖梁材料为无磁防腐不锈钢管内外包覆玻璃纤维制作,满足支撑强度的同时与海水绝缘。导柱安装于左右向移动的行车上部,为悬臂结构,如图5所示。
当船模处于导柱的最下端,即船模处于垂向放置的极限位置,导柱的受力和形成摆动的幅值最大。导柱的校核主要是计算导柱的受力和拖动装置制动后船模惯性对竖梁扰度的校验。已知船模的最大试验航速Vt为0.5 m/s,船模重200 kg,根据公式F=m·(V_t-V_0)/t得,V0=0为停止,即拖车制动后船模的受力与电机的延时控制有关,假设电机在1 s后停止,F=1250 N。则船模对于导柱的加载P=1250 N,材料参数为l=3863 mm,E=108 GPa,I= 5.027×108 mm4。计算得到最大应力处为36 MPa,材料满足使用要求,排除水流的影响,瞬间最大挠度为10.5 mm,满足设计要求。图6为仿真计算图。
1.2 集中控制平台设计
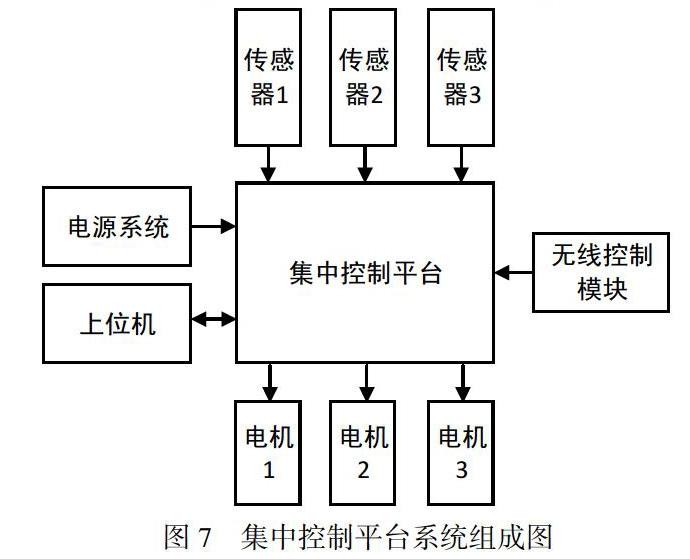
集中控制平台为船模位置控制系统核心,如图7所示为集中控制平台的系统组成,电源系统为集中控制平台供电,集中控制平台接收X、Y、Z三方向位置传感器数据,同时实现三方向电机的运动控制,无线控制模块通过与集中控制平台通讯实现设备运动的远程控制,上位机与集中控制平台相互通讯,上位机可接收控制平台数据并输出控制指令。
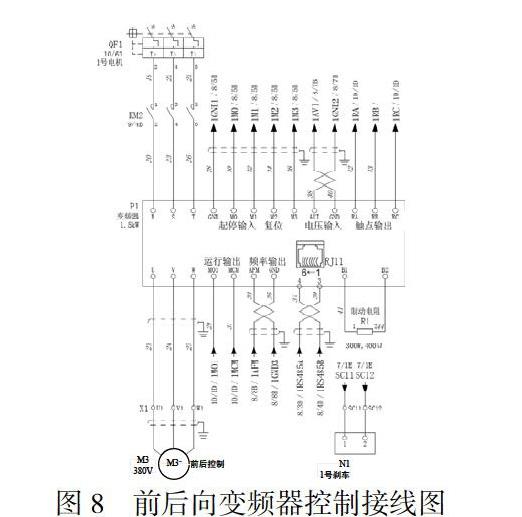
船模位置控制系统前后方向和左右方向采用台达VFD-M型变频器,如图8所示为前后向变频器控制接线图,电源系统分配到1号电机的电源接入变频器,输出控制前后向运动的电机。变频器具备接收启停输入、复位、电压输入、触点输出、运行输出、频率输出、制动及与外部控制输入等控制指令,通过外部操控或设定输入实现船模位置控制系统前后方向启停、运动模式、运动方向、运动速度、运动行程等运动控制。
2 速度与位置精度测试
为测量系统对目标磁场的影响,不加载目标船模,全速运行时测量水池底部的磁场畸变,通过多次测量,磁场干扰最大值为3 nT,系统对目标磁场影响可忽略不计。
船模位置控制系统支杆下端通过非金属材料包覆和结构处理,系统与海水形成绝缘,对目标电场的测量影响较小,可忽略不计。
船模位置控制系统可通过无线遥控器或者手动触摸装置进行控制。其运行方式包括集中控制平台手柄手控运行、无线遥控(可控范围小于50 m)运行、自动设定运行三种模式。
选取前后运动方向进行测试,三种运行模式下均加载船模负载,分别对位置控制系统的速度精度进行测试,自动运行模式下对系统的位置精度进行测试。根据实际测试数据与目标指标的综合评判,评估船模位置控制系统整机运行时该方向的运动控制精度。
如下表1所示,分别设定运行速度,通过三种不同方式运行,分別测量稳定运行中的运动距离与运动时间,计算实际运行速度。
系统位置归零后,设定目标位置,分别按不同速度运行至该设定位置时停止,测试船模位置控制系统实际停止位置,与设定位置比较计算船模位置控制系统的位置误差,如表2所示。
3 结束语
船模位置控制系统由导轨、驱动电机组成的拖车动系统及控制平台等构成,由变频器控制船模沿导轨进行前后、左右方向的运动,分别能实现手动、遥控、自动控制模式。系统设计中较好地实现了磁场和电场的干扰控制,通过测量不同模式下的运动速度比较,低速和自动模式下的运行速度更为准确。自动模式下的位置控制精度较高,由于船模和拖动系统的惯性存在,速度较低的情况下,运行达到位置更为精确。速度和位置精度较好地满足使用要求。
参考文献
[1] 于志丹.试验水池拖车速度控制系统设计与实现[D]. 哈尔滨:哈尔滨工程大学,2008.
[2] 冷杰,程辉辉,周田宰.基于下半空间测量的水中目标磁异常计算方法[J]. 探测与控制学报,2017(2),39(1):80-83.
[3] 赵惇良,孙宁. 在用行车拖动系统的改造[J]. 电机与控制应用,2012,39(2):52-55.
[4] 李丽艳.电机拖动中变频调速技术的实际应用分析[J].卷宗,2017.15:194.
[5] 於朗.PI控制的电机拖动系统动态特性分析[J].工业控制计算机,2016,39(6):151,155.
[6] 刘中阳,罗冰,刘力.利用变频器实现大惯量拖动系统准确停车的设计[J].城市建设理论研究,2012,2:1-4.