采、集一体化的采摘装置设计与应用
2019-10-21宋红任梦阳刘欢范鑫刁鹤轩
宋红 任梦阳 刘欢 范鑫 刁鹤轩
【摘 要】为了更好的辅助果农高效、高质量的采摘收集果子,本文提出一种采、集一体化的小型采摘装置,在保护果树枝叶的情况下,它通过采摘、收集、输送和伸缩四个部分的结构设计实现了采、集一体化,做到了最大范围的保护果子和果树。实验结果证明该装置能够有效提高果子采摘效率和质量,操作简便快捷,实用性强,同时减轻了果农劳动强度,保证了果农在采摘收集过程中的安全。
1 绪论
在我国果农采摘的果子包括苹果、山楂、枣等多种果子,面对产量高、生长密集、果型小,同时果柄与树枝的连接较为松弛的果子,基于不同高度的果树或者果子,国内大多数的地方对其进行采摘时常常通过人工结合装置辅助的方法采摘,比如在人工无法触及到的地方常常借助凳子、杆子、地面铺布等装置辅助采摘收集,目前果子的采摘收集主要存在以下问题:(1)人身损伤的不安全隐患。成年的果树大多都生长比较高大,造成人手够不到的区域,同时有些果树(如枣树)的树干和枝条上生有利刺。因此采用人工徒手进行果子采摘时,鉴于身高的限制,人手采摘结合梯子、杆子(木杆或竹竿等)等其他装置进行作业时,存在果农摔落跌倒、被树枝和利刺划伤等人身损伤的隐患,并且采摘费时费力,不适于大批量采摘。(2)装置不完善、收集效率和质量低。梯子、杆子(木杆或竹竿等)、地面铺布等采摘收集装置,一方面,不同高度的果树和果子需要不同长短的杆子击打,因此,采摘收集装置不能满足多样化的采摘高度需求,且使用较为费力;另一方面,用杆子击打下来的果子摔落并散落在地上,使果子可能被击打、摔落损伤,影响果子质量,降低果子保存寿命,进而影响果子销量,且地面散落和铺布会造成果子收集低效、不方便。(3)药物采摘危害人体。使用稀释的乙烯利对果树进行喷洒,通过乙烯利催熟果子使其落下,这种方法虽然省时省力,但乙烯利对人的皮肤、眼睛有刺激作用,对粘膜有酸蚀作用,乙烯利遇明火、高热可燃,其粉体与空气可形成爆炸性混合物, 当达到一定浓度时,遇火星会发生爆炸,受高热分解放出有毒的气体,容易危害采摘者的身体健康,同时乙烯利催熟会影响果子的营养价值和口感。
针对国内果子采摘收集装置的弊端和特点,本文提出一种采、集一体化的小型采摘果子装置,在保护果子和果树的条件下,更好的辅助果农高效、高质量的采摘收集果子。
2 采、集一体化的采摘装置设计
图1 采、集一体化采摘装置原理示意图
采摘装置通过收集结构将采摘机构采摘的果子经收集部的底部连接的输送软管输送至地面容器中。如图1采、集一体化采摘装置的工作原理示意图,装置内置12V电机,以及可以重复性的充电的锂电池,其有效工作时间4-5小时,采用300r/min减速电机作为动力源,连接连轴器带动旋转结构,旋转结构外部包裹海绵,用塑料封装,起到保护果实的作用。外部伞状结构作为收集果子的装置,采用连杆机构将集枣装置方便收纳,再安装输送软管将枣从收集装置直接传送到地面高效、高质量收集。为方便果子的采摘和收集,装置主要包括采摘结构、收集结构、输送装置和伸缩装置四大部分组成。
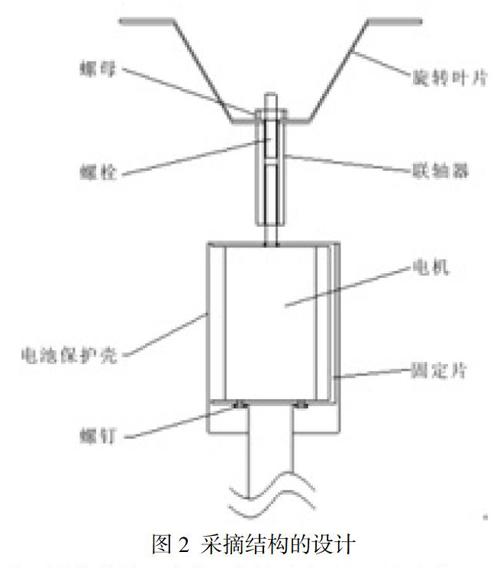
图2 采摘结构的设计
装置工作时收集结构呈伞状,能够增大对果子的收集面,避免直接落地造成损坏。将通过采摘机构采摘的果子通过由伞骨机构、伞布和输送软管组成的收集结构收集后通过收集部的底部连接的输送软管将收集部收集的果子输送至地面容器中。其中伞布选用棉布、混纺布、POE或者PVC塑料布作為主要材料。通过驱动机构带动旋转叶片旋转将果子打落,打落的果子落入收集部,从而实现果子的采摘,这样不需要人工进行采摘和捡拾,也不需要费力击打,加快了采摘进度,减轻了劳动强度,省时省力,适应于大批量采摘;同时,使用者采摘过程中不接触果树,避免了人工徒手采摘带来的危险。使用者可以根据枣树的高度调节伸缩杆的长度以满足不同树高的要求,从而不需要准备不同长度的长杆,适应性强。
采摘完成后,通过开关控制装置停止工作后手动向下拉滑动套将收集部收拢,且当该装置电量不足时,可以通过充电插口充电。
2.1 采摘结构的设计
在采集装置中主要通过旋转叶片来采果子,并将采摘的果子通过杆体上的收集部分进行收集,防止直接落地对果子造成伤害。如图2所示采摘结构设计,联轴器位于杆体顶端,旋转叶片和电机分别位于联轴器的上端和下端,电机保护壳位于电机外。
联轴器的上端和旋转叶片通过螺母和螺栓连接,下端与电机的输出轴连接,装置的电机采用额定电压为12V,额定转速为300r/min的微型减速电机进行动力输出,旋转叶片和收集部之间的电机通过传动连接。在杆体下方的伸缩杆顶部焊接固定片通过螺钉与电机连接,防止在装置工作时电机发生位移或掉落的情况,确保了该装置的可靠性。在电机外部设置了能够对其起到保护作用的电机保护壳,能够有效避免外力撞击或水进入电机而影响电机的正常工作,延长电机的使用寿命。
2.2 收集结构的设计
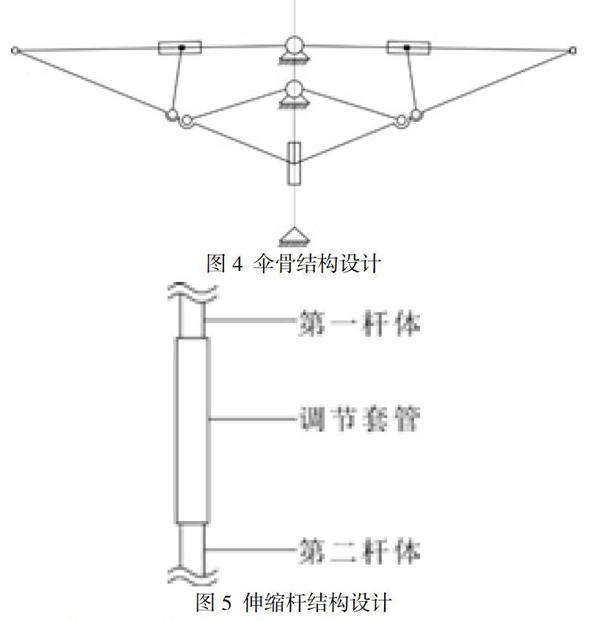
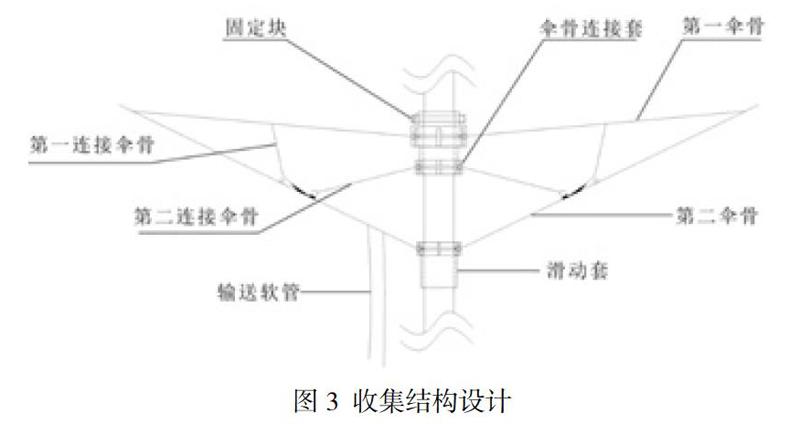
在装置结构设计中采用伞状结构实现对采摘部分果子的收集,如图3的收集结构设计示意图和图4伞骨结构设计示意图所示,该收集装置主要由伞骨机构组成,第一伞骨对第一伞布起支撑作用,在收集装置杆体上方设置有用以连接固定伞骨连接套的固定块以及下方的滑动套,第二伞骨支撑第二伞布且分别与第一伞骨和第二伞骨之间的第一连接伞骨及第二伞骨和伞骨连接套之间的第二连接伞骨通过连接件铰接。其中,第二伞骨由通过连接件连接在一起的两段伞骨组成,一段与滑动套通过连接件固定连接,另一段与第一伞骨通过连接件铰接。
图3 收集结构设计
收集部的底部连接的可拆卸输送软管便于收集的果子输送至地面容器中,并选择可伸缩塑料软管材料,一方面,由于塑料软管质量轻,不会给装置本身增加过多的重量,同时,能够及时地将收集在收集部中的果子输送至放置在地面上的容器内,不需要人工捡拾果子,减轻了劳动强度,提高了工作效率;另一方面,塑料软管不会在果子下落的过程中对果子造成损伤,且方便拆卸和收纳。
图4 伞骨结构设计
图5 伸缩杆结构设计
2.3 伸缩杆结构的设计
由于果树的高度不同,因此我们在采、集装置上设计了能夠改变装置长短的伸缩装置,使用者可以根据果树的高度来调节伸缩杆的长度以满足对采摘不同树高的果子的要求,从而增加装置的适应性。如图5所示伸缩装置结构示意图中,伸缩杆位于伞骨机构下方的杆体上,主要包括调节套管、第一杆体和第二杆体三部分。
通过驱动机构供电的电池为伸缩杆的使用提供动力输出,并由图1中杆体外侧的开关控制驱动机构供电回路的通与断。其中第一杆体和第二杆体分别位于调节套管的两端,三者之间通过套管壁上的内外螺纹通过螺纹连接,而且可以根据螺纹连接的长度来改变伸缩杆的长度。
3 采、集一体化的采摘装置验证
为了验证采集一体化装置完成采摘任务的质量和效率,我们构建了实验平台开展采摘作业的对比实验,分别选用2棵树冠高度为2-3米左右,果密度较为接近的枣树,第一组是棍棒为参照装置的人工采摘组,并可以借助梯子类工具采集高处枣作业,第二组是采集一体化为试验装置的电动采摘组。
3.1 实验被试
为了验证采摘装置采摘枣的质量和效率,在西安石油大学工业设计专业本科学生里选择年龄20-21岁的3名均熟悉采摘枣经历的男生作为被试用户。实验前告知被试实验任务和实验目的,取得被试同意,被视需要在正式实验前对实验样本设定使用情景,实验人员尽量不在被试视线所及范围内进行录制,以达到被试最原本和真实的使用状态,中途不干涉和引导。
3.2 实验设计和任务
实验设计为每组被试在规定10分钟内完成:1.采摘枣,2.收集枣入筐两项任务,每位被试参与所有的使用阶段,且在正式实验开始前,分别了解各自装置的结构部件和使用方法。实验人员用视频采集设备记录被试的使用行为轨迹,并采用秒表方法记录完成任务的时间。用人工记数的方法连续记录被试处于:1采摘枣,2汇集枣入筐的实验数据,记录采集枣入筐的个数。同时,由于物理或人为原因造成被损坏枣的个数也将会被记录。
3.3 实验结果和分析
实验数据收集完毕后,采用人工计数和称重的方法进行采、集枣行为绩效分析,从有效枣重量和无效枣数量两个指标进行数据统计分析,其中有效枣重量指的是入筐且无损坏枣的重量,无效枣数量指的是被物理或人为损坏的枣数量。采摘作业对比试验结果如表1所示.
表1 采摘作业对比试验
通过表 1 可以看出:在采摘初期,人工采摘组的体力较为充足,分工筛检、收集大量落在地面的有效枣,随着采摘树冠高度的增加,徒手采摘需要借助梯子等辅助工具,辅助工具准备时间长、次数多,加之劳动强度不断增大,采摘能力明显下降,并枣果散落地面数量增加,地面采集枣果中人工踩踏枣果频率加大,采集能力也降低;电动采摘组树上采摘能力一直稳定并能及时有效收集枣果,少量落地枣果由人工筛检收集,电动采摘组不仅效率稳定,采集质量高,自动省力的优势越来越明显,电动采摘组的有效枣共计数量明显多余人工采摘组数量,无效枣共计数量也少于人工采摘组。
4 结论
果园采摘对比试验表明,随着采摘的进行, 采、集一体化电动采摘的优越性愈加显现,采摘和收集的效率和质量明显高于人工采摘,高枝采摘的优越性更加明显,效率大约是人工采摘的 2 倍, 采、集一体化装置的结构轻巧,操作容易,可实现高效率、高质量枣果的电动化采摘。
参考文献:
[1]马质璞, 张抗, 谭骥, 等.一种新型单果采摘器的设计[J].机械设计与制造, 2017 (5):252-255.
[2]付荣利.果园采摘机械的现状及发展趋势[J].农业开发与装备, 2011 (5):17-19.
[3]段洁利, 陆华忠, 王慰祖.水果采收机械的现状与发展[J].广东农业科学, 2012, 39 (16):189-192.
[4]张卫卫,潘莹,王浩铭,邓冲,任梦阳.感应式电动采枣器的设计与应用[J].农业科技与装备, 2018(01):29-30+33.
作者简介:
宋红,1977年,女,汉,陕西渭南,博士生,讲师,研究方向为用户体验设计、交互式产品形态与创新设计方法研究,并结合石油石化行业特色,针对有杆抽油系统的动液面预测和工况诊断开展科研工作。
(作者单位:西安石油大学)
