三区域电力系统重叠约束信息变化的稳定性研究
2019-10-21安铁锋
安铁锋


摘要:研究了三个区域电力系统重叠信息变化时的系统的稳定性问题。以包含原理為基础,把系统的重叠部分解偶,并且利用线性矩阵不等式(LMI)方法设计分散控制器,进而使整个系统达到稳定。最后给出了仿真例子,进一步说明了重叠约束信息变化系统的稳定性和控制器设计的有效性。
关键词:分散控制;包含原理;大系统;线性矩阵不等式
Abstract: The problem of three area power systems stability when overlapping information varied was discussed in this paper .Based on the inclusion principle, the overlapping part of the system was decentralized., and the Linear matrix inequalities was used to design the decentralized controllers. So the overall system reached stability. In the last an example was given to prove the stability and demonstrate that the effectivity of LMI method with overlapping information varied.
Key words: Decentralized control; Inclusion principle; Large-scale systems; Linear matrix inequalities
1 引言
由重叠互联子系统所组成的复杂系统的研究,一直受到人们的广泛关注[1-4]。其原因在于现代工业社会的许多控制问题,都与复杂系统各个子系统之间的互联项有关,例如电力系统,交通运输系统,化学过程控制系统,社会经济系统等等。在这类复杂系统的研究中,典型的控制方式是分散控制[3-6]。
本文中,以分散控制这一经典控制理论为基础并以包含原理为基础把重叠信息约束变化时系统的重叠部分解偶,然后利用线性矩阵不等式为解偶子系统设计分散控制器,并对重叠部分的变化和互联部分做了界定,在满足重叠部分变化界定条件的情况下,推导出重叠信息变化时系统的稳定性。然后由李亚普诺夫方程和Schur补定理推导出重叠信息变化问题的系统线性矩阵不等式解法,最后以三区域互联电力系统模型为例给出了重叠约束信息变化时系统的仿真结果。
2 研究的问题模型
考虑一线性连续时不变随机系统:
这里我们以三个区域重叠互联电力系统为例,多个区域两个重叠可类推。其中,,。高斯白噪声输入向量和输出向量分别与和同维同组划分,且分别有方差和;对应各系数阵及方差阵分别为:
式(10)中参数是区域基于区域的稳态负载标称系数。其中,是区域1,2,3的稳定状态负载。
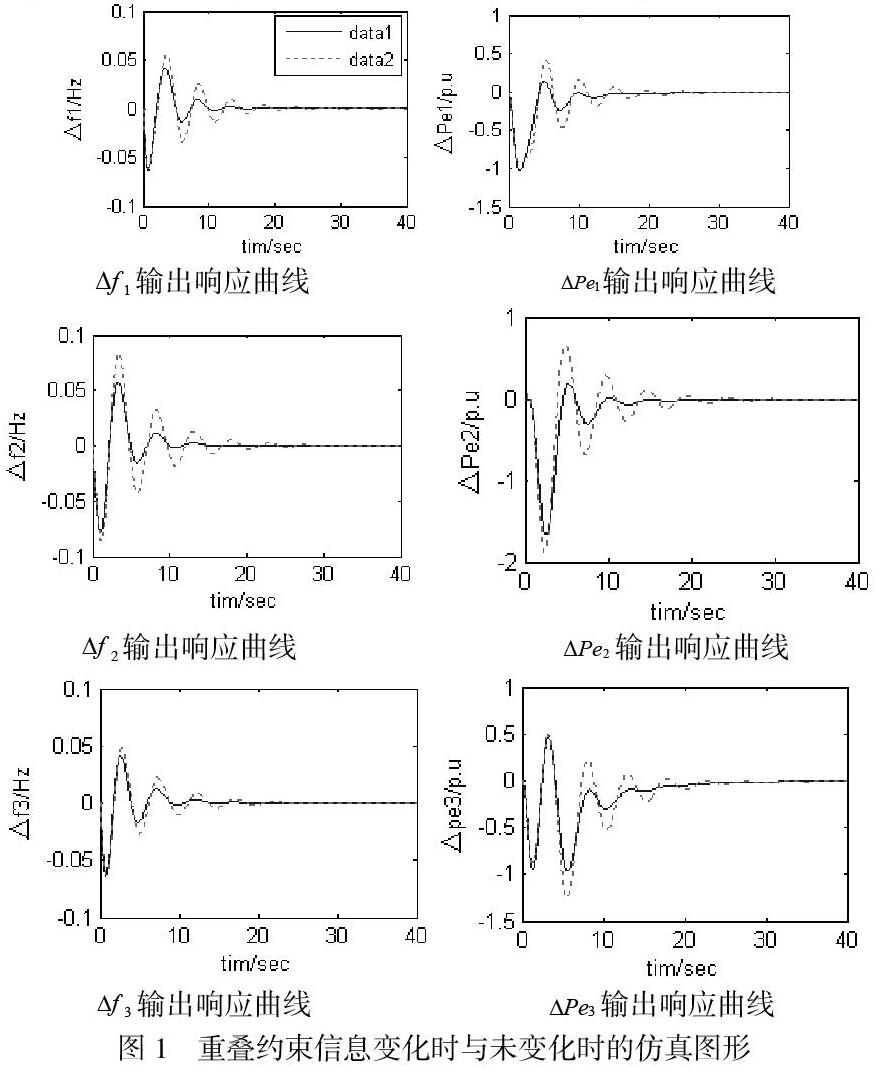
当两个区域的重叠约束信息变化时,得出的系统的特征值见表1,可以看出,在重叠信息约束变化时,采用上述方法为系统设计的控制器,将其应用到两区域重叠互联电力系统中时,系统的特征值均为负值,从而可以判定此控制器可以镇定原系统。证明该方法的有效性。使用线性矩阵不等式(LMI)为系统设计控制器,由上面的两个不等式约束条件(7),(8)得到下面的仿真曲线,图1为主要输出响应曲线,包括系统的频率变化曲线,交换功率变化曲线。其中虚线(data2)代表重叠信息未变化时系统的输出响应情况,而实线(data1)代表重叠信息变化时系统的主要输出曲线变化情况,从中可以看出当重叠信息约束变化时,采用此中方法设计的控制器在重叠信息约束变化时,频率变化率出现了较重叠约束信息未变化时大的波动,但是在12秒后,系统仍然可以迅速地接近稳态值,大致在16秒后交换功率变化率也趋近于零的,从而说明在重叠信息约束变化时,此种方法是可行的。
结 论
通过上面的论述,我们利用包含原理的约束条件和聚集条件,把三个区域重叠信息变化系统进行重叠部分分解,把重叠信息变化系统的重叠部分打开,利用包含原理和线性矩阵不等式,和状态转移矩阵公式的变换把重叠信息变化系统(1)的稳定问题更加清楚的表现出来,即等价于同时给出了与及的关系,并证明了重叠信息变化时稳定性的充分条件,然后利用以李亚普诺夫和Schur补定理为基础推导出的线性矩阵不等式对已经解偶的系统进行分散控制器的设计,以及对重叠约束信息变化系统的仿真。下一个阶段要做的工作,是以四个区域两两重叠互联电力为模型,当重叠约束信息变化时,系统的分散控制器的设计和仿真。
参考文献 (References)
[1] D.D.Siljak, “Decentralized Contra1 of Complex Systems”. Boston: Academic Press, 1991.
[2] D. D. Siljak, Large-scale Dynamic Systems. New York. North-Holland, 1978.
[3] X. L. Tan and M. Ikeda, “Decentralized stabilization for expanding construction of large-scale systems,” IEEE Trans. Automat. Contr., vol. 35, June 1990, pp. 644-651.
[4] 陈雪波, 互联电力系统的特殊结构分解, 鞍山科技大学学报,vol.26. No.6. Dec. 2003.
[5] S. H. Wang and E. J. Davison, “On the stabilization of decentralized control systems,” IEEE Trans. Automat. Contr., vol. 18, May 1973, pp. 473-478.
[6] N. R Sandell, P. Varaiya, M.Athans and M. G. Safonov, ‘‘Survey of decentralized control methods for large-scale systems,” IEEE Tram. Automat. Contr., vol. 23, Feb. 1978, pp, 108-128.
[7] D. D. Siljak, Decentralized Control of Complex Systems, Academic Press, 1991.
[8] Ikeda M, Siljak D. D. and White D E “.An inclusion principle for dynamic system”. IEEE Tranc,1984, AC-29(3):244~249
[9] 陈雪波, Stankovic S.S. “ Overlapping Decomposition and Decentralized LQG Control for Interconnected Power Systems”. Proceedings of IEEE SMC96, Beijing ,1996,14~17
[10] Calovic,M.S.(1984).Automatic generation control: Decentralized area-wise optimal solution, Electric Power System Research,7.115-139.