基于MATLAB的六轴工业机械手运动学分析与仿真研究
2019-10-21李雨健
摘要:以六轴工业机械手为研究对象,应用标准的参数法建立机器人各杆件坐标系,并根据坐标系之间的齐次变换关系建立运动学方程,从而得出正解。该机械手后3个关节为旋转关节,且在腕中心点解耦,故用代数法计算得出逆解。基于MATLAB Robotics Toolbox工具箱,构建该机械手的三维模型图,依据关节空间、笛卡尔空间的转换关系,应用FKINE、IKINE函数对该机械手进行正、逆运动学问题进行仿真。仿真结果验证了所开发的正逆运动学算法的正确性且所建模型能快速地进行正逆解求解,有效地获得机器人的关节角、位姿等运动参数,这对于进一步系统研究该六轴工业机器人的轨迹规划提供了数据保障和理论分析依据。
关键词:六轴工业机械手 MATLAB 运动学 机器人工具箱
0.引言
工业机器人是一种自动的、位置可控的、具有编程能力的多功能、多自由度机械手,可用来搬运、码垛等[1]。随着“中国制造”向“中国智造”升级,六轴工业机器人逐渐取代产线工人被应用到生产中,解决劳动力短缺和劳动力成本增长问题,尤其是在珠三角制造行业中大规模应用,诸如家电、汽配、电子信息、食品等诸多行业。但与此同时,为了满足更加复杂的产线作业和更加快速的生产节奏,对其性能指标的要求也越来越高,因此,对机器人的运动学进行深入研究从而提高精度等关键指标,在生产实践中有极其重大的意义[2]。
针对六自由度串联工业机器人,本文分析其运动学正逆解问题,实质是实现关节空间下的关节角和笛卡尔空间下的位姿转换。在MATLAB Robotics toolbox中,先用Drivebot()函数构建机器人模型,再应用FKINE、IKINE函数对该机械手进行正、逆运动学问题仿真分析,从而对开发的正逆运动学算法进行仿真验证[3]。
1.运动学模型
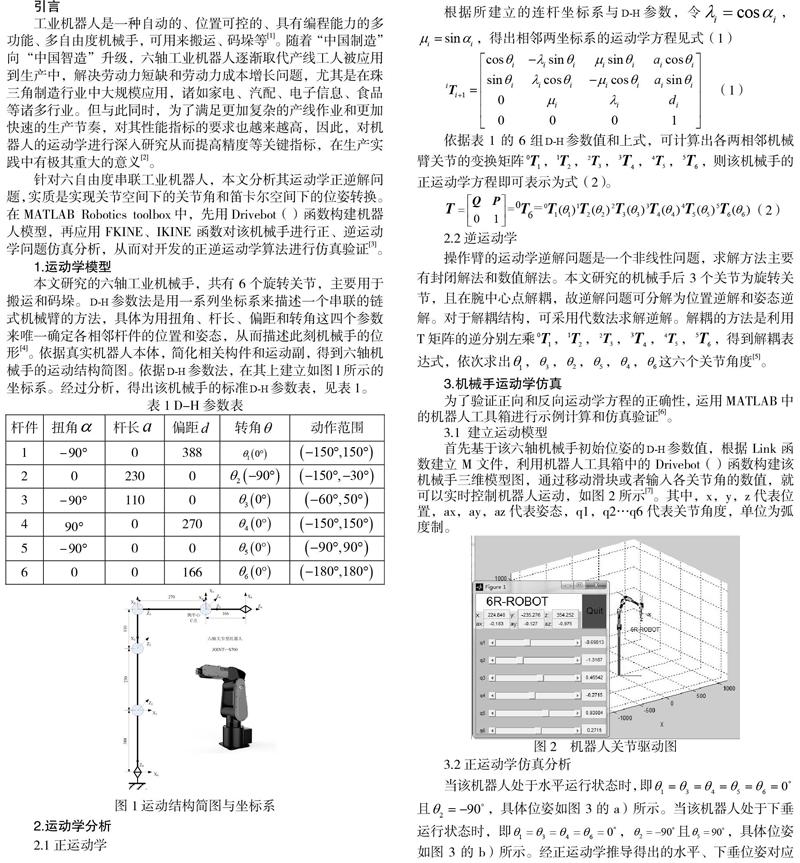
本文研究的六轴工业机械手,共有6个旋转关节,主要用于搬运和码垛。参数法是用一系列坐标系来描述一个串联的链式机械臂的方法,具体为用扭角、杆长、偏距和转角这四个参数来唯一确定各相邻杆件的位置和姿态,从而描述此刻机械手的位形[4]。依據真实机器人本体,简化相关构件和运动副,得到六轴机械手的运动结构简图。依据参数法,在其上建立如图l所示的坐标系。经过分析,得出该机械手的标准参数表,见表1。
2.运动学分析
2.1正运动学
2.2逆运动学
3.机械手运动学仿真
为了验证正向和反向运动学方程的正确性,运用MATLAB中的机器人工具箱进行示例计算和仿真验证[6]。
3.1 建立运动模型
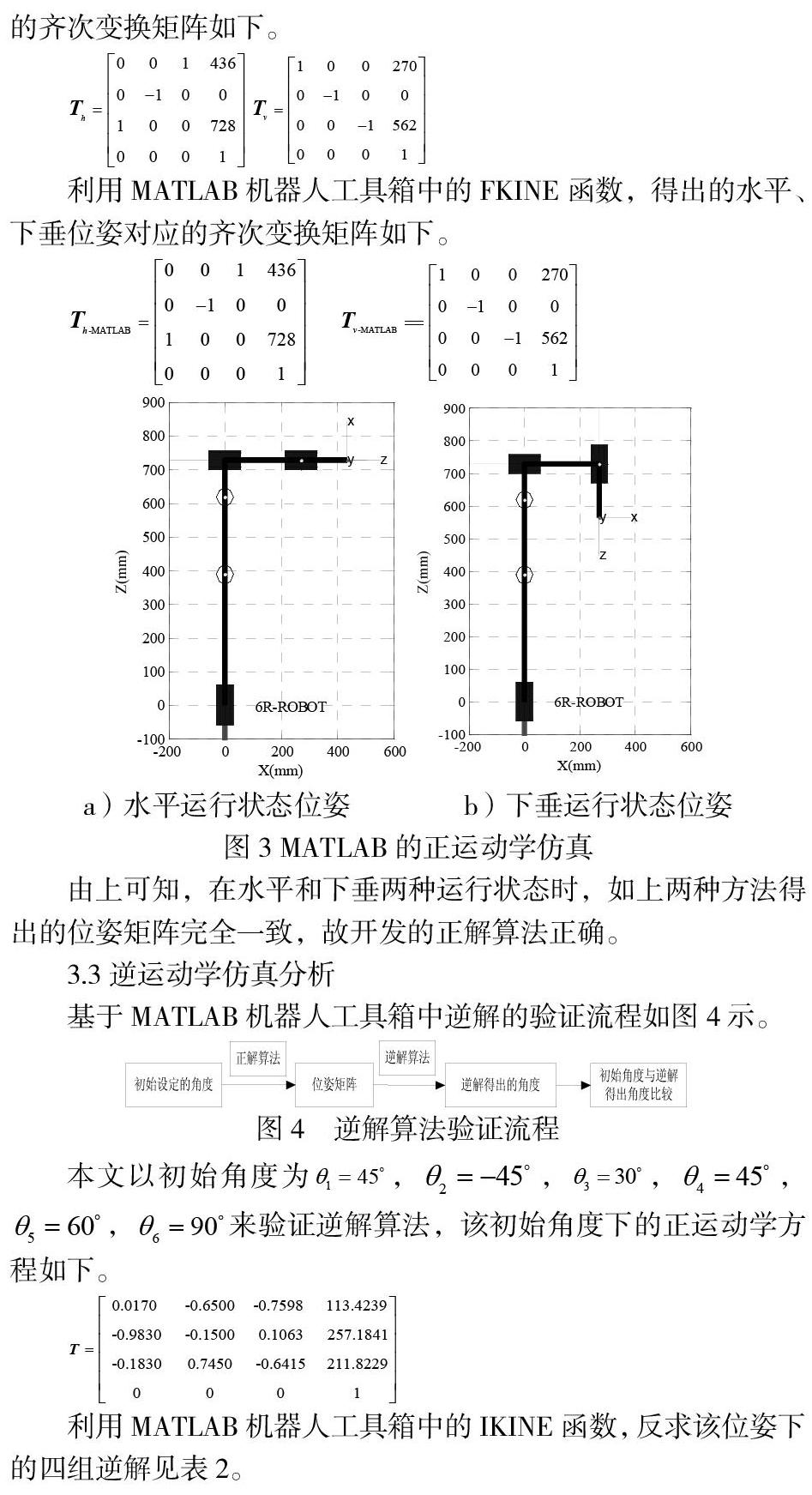
首先基于该六轴机械手初始位姿的参数值,根据Link函数建立M文件,利用机器人工具箱中的Drivebot()函数构建该机械手三维模型图,通过移动滑块或者输入各关节角的数值,就可以实时控制机器人运动,如图2所示[7]。其中, x,y,z代表位置,ax,ay,az代表姿态,q1,q2…q6代表关节角度,单位为弧度制。
3.2正运动学仿真分析
当该机器人处于水平运行状态时,即且,具体位姿如图3的a)所示。当该机器人处于下垂运行状态时,即,且,具体位姿如图3的b)所示。经正运动学推导得出的水平、下垂位姿对应的齐次变换矩阵如下。
利用MATLAB机器人工具箱中的FKINE函数,得出的水平、下垂位姿对应的齐次变换矩阵如下。
由上可知,在水平和下垂两种运行状态时,如上两种方法得出的位姿矩阵完全一致,故开发的正解算法正确。
3.3逆运动学仿真分析
基于MATLAB机器人工具箱中逆解的验证流程如图4示。
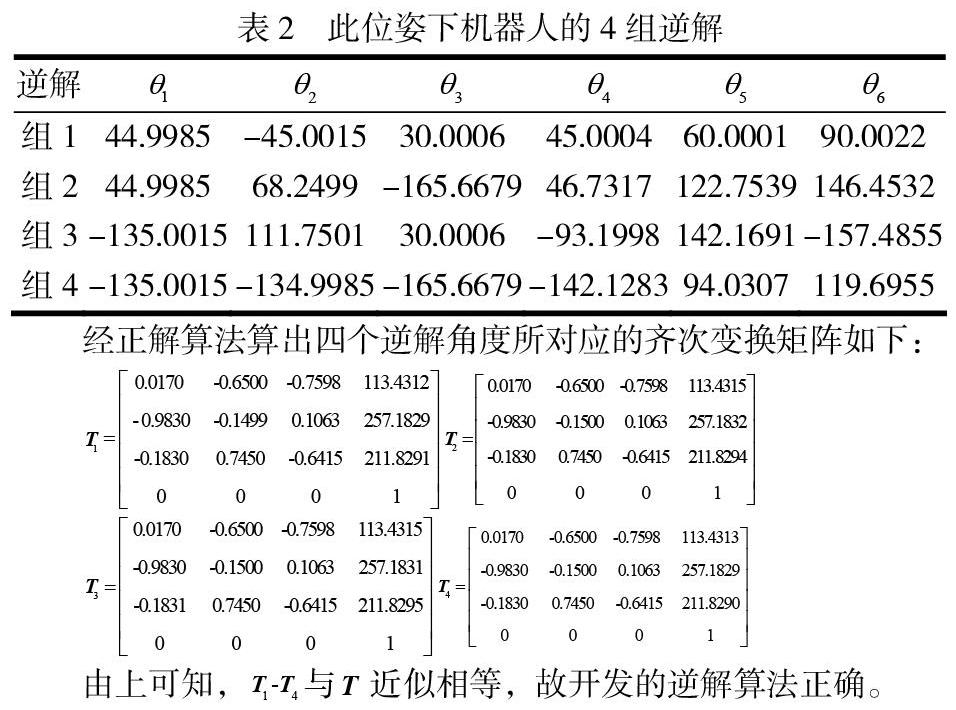
利用MATLAB机器人工具箱中的IKINE函数,反求该位姿下的四组逆解见表2。
经正解算法算出四个逆解角度所对应的齐次变换矩阵如下:
由上可知,与近似相等,故开发的逆解算法正确。
4.结论
针对六轴工业机械手,先简化模型得出其运动结构简图,再利用标准的参数法对该六轴工业机械手进行运动学建模,得出正逆运动学算法。基于MATLAB中的机器人工具箱,编写机器人的程序语句,展示机器人关节角度驱动的效果图,验证了所开发的机器人正逆运动学算法,从而为后续的机器人的轨迹规划研究提供相关的数据保障。
参考文献
[1] 姜倩倩. 板簧搬运机械手控制系统及轨迹规划研究[D]. 山东理工大学, 2012.
[2]刘云辉, 韩玉勇. 鲁南地区机械行业“机器换人”转型升级应用研究[J]. 现代制造技术与装备, 2016, 3(8):153-155.
[3]左富勇, 胡小平, 谢珂, et al. 基于MATLAB Robotics工具箱的SCARA机器人轨迹规划与仿真[J]. 湖南科技大学学报(自然科学版), 2012, 27(2):41-44.
[4]杨晓钧.工业机器人技术[M].哈尔滨工业大学出版社,2015.
[5] 李雨健. 六轴码垛机器人的轨迹规划与关节摩擦补偿研究[D].哈尔滨工业大学,2017.
[6] 王晓强, 王帅军, 刘建亭. 基于MATLAB的IRB2400工业机器人运动学分析[J]. 机床与液压, 2014(3):54-57.
[7] 李启才. 基于共形几何代数的可重构机器人运动学研究[D]. 北方工业大学, 2015.
