基于HALCON双目标定的算法优化研究
2019-10-21朱荣华
朱荣华
摘 要:为了简化立体匹配的复杂度,进一步优化双目立体系统标定算法,文章基于双目立体视觉视差原理,通过大量实验对标定立体系统算法以及相关参数优化进行了研究,分析了影响算法各个参数的设置以及高精度标定板的获取,总结出了基于HALCON双目标定的优化方法,计算误差可达到0.15个像素,实验证明该方法提高了标定精度和计算效率,可满足各种测量系统的需要。
关键词:HALCON;视差;亚像素级处理;系统标定
近年来,双目立体视觉系统研究一直是机器视觉的研究热点和焦点[1]。非接触式双目立体视觉具有设备要求较低、连续性高、非接触和无损伤等优点[2],同时,双目视觉系统会出现透视、旋转等几何失真,以及现实世界中物体之间相互遮挡等情况,这些因素大大增加了匹配的难度[3],而精确标定摄像机参数可大大提高测量精度,在一定程度上减小匹配的复杂度。HALCON是德国MVtec公司开发的一套完善的视觉算法包[4],包含三维重建、多目立体视觉和深度学习等高级算法,此软件应用领域广泛,需要图像处理的地方均可以使用HALCON。本文基于HALCON图像处理平台,求解左右摄像机参数,提出了基于HALCON双目标定的优化方法,该方法操作简单、实用性强。
1 基于HALCON标定实验
1.1 采集标定板图像
本实验选用HALCON提供的标准2D精密靶标,靶标大小为(30×30)mm,阵列为7×7的黑色圆点陈列型平面标定板。确定合适的标定板规格后,通过函数gen_caltab()生成相标定板描述文件,它描述了标定板的行数、列数、方向标记等信息。然后,调用函数read_image(),循环读取15幅标定板图像。
1.2 读取标定参数
获取标定板图像后,通过函数find_caltab(),该函数经过平滑图像和阈值分割处理后,可以找到标定板位置、分割出标定板区域。需要注意的是,该算子的参数设置关系着标定板能否准确提取,影响着标志圆点的精确提取,经循环处理后严重影响整个双目系统的标定精度。实验合理设置的参数为SizeGauss=3,MarkThresh=70,MinDiamMarks=5,可直观验证设置的参数能否准确分割出标定板区域。为了确定每个标定板区域中标志圆点的坐标,选用函数find_marks_and_pose()。首先,通过亚像素阈值分割算法,将标定板内部与背景分离;其次,利用Canny亚像素边缘提取和圆心确定方法,确定每个标定板区域中49个圆形标志点的图像坐标以及左右摄像机的外部参数初始值。
1.3 执行标定
通过调用函数binocular_calibration()完成双目系统标定,即确定两摄像机的内外参数以及两摄像机的位置关系。实验采集15组不同姿态下的标定板图像,通过对左右拍摄的15幅图像循环处理,在提取特征时综合15幅图像,左右摄像机各计算出725(49×15)个二维坐标值,计算的坐标精度为亚像素级,同时,确定出左右摄像机与15幅标定板的位置关系,进一步将这些数据保存。
2 结果分析
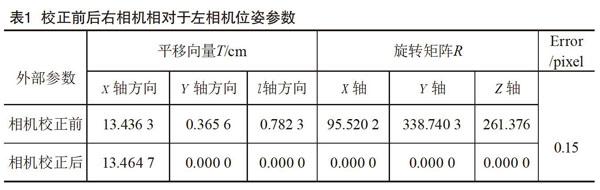
根据上述的摄像机标定实验,获得双目系统标定前、后两摄像的参数,如表1所示。
由表1数据可知,右图像相对于左图像的位置仅在X轴方向上有平移,不存在Y,Z轴的平移与旋转,说明校正后双目测量系统是标准的外极线几何结构[5]。摄像机标定过程的计算误差达到0.15个像素,整体实验精度较高,可满足各种测量系统的使用要求。
3 结语
本文基于双目视差原理,通过大量实验对标定系统算法以及相关参数优化进行了研究。通过左右摄像机采集了15组不同姿态下的标定板图像,然后,利用HALCON软件相关标定算子进行标定,分析了影响算法的各个参数。通过大量实验验证了该方法操作简单、实用性强,明显提高了标定精度和计算速度,简化了立体匹配的复杂度,可广泛应用在实际工程中。
[参考文献]
[1]张俊勇,伍世虔,陈斌,等.基于双目视觉的零件多尺寸在线测量系统[J].仪表技术与传感器,2018(10):75-80.
[2]沈文波,周武.基于双目视觉的飞行头盔动载特性测试技术研究[J].计算机测量与控制,2016(6):52-55.
[3]张晓东,吴斌.小视场集成成像三维信息获取技术研究[J].光电子·激光,2017(11),1240-1245.
[4]王桂芝.基于HALCON的双目视觉系统标定[D].大连:大连理工大學,2014.
[5]张如如,葛广英,申哲,等.基于HALCON的双目立体视觉工件尺寸测量[J].计算机测量与控制,2018(1):59-63.
