底盘悬架K&C试验台的电控系统设计及研究
2019-10-21龚杰
摘 要:随着我国汽车工业的飞速发展,人们生活水平的不断提高。人们对汽车的舒适性、操控性等品质要求也越来越高。相对发达国家汽车企业而言,国内自主品牌汽车企业在底盘性能开发方面尤其是悬架系统研究方面仍存在严重不足。由于进口的底盘悬架K&C(K即运动学特性,Kinematic;C即动力学特性,Compliance)测试设备价格非常昂贵,研发高性价比的自主底盘悬架K&C测试设备,缩小与发达国家汽车企业的技术差距,降低自主品牌汽车企业的试验开发成本,促进本国汽车行业发展具有非常重要的意义。本公司在承袭多年汽车试验设备开发经验以及参考国外相关先进设备基础上成功研制了具有自主知识产权的底盘悬架K&C试验台。文章主要介绍该设备的电控系统设计及研究分析。
关键词:底盘;悬架;K&C;电控系统
0 引言
在科学技术高度发达的今天,先进的测试系统都离不开机电技术的高度融合,这种发展趋势在汽车测试领域尤为突出。测试设备通常由机械系统、电控系统、软件系统三大部分构成。电控系统对测试设备的测量精度、可靠性、稳定性等关键技术指标起着关键性作用。
1 测控需求分析
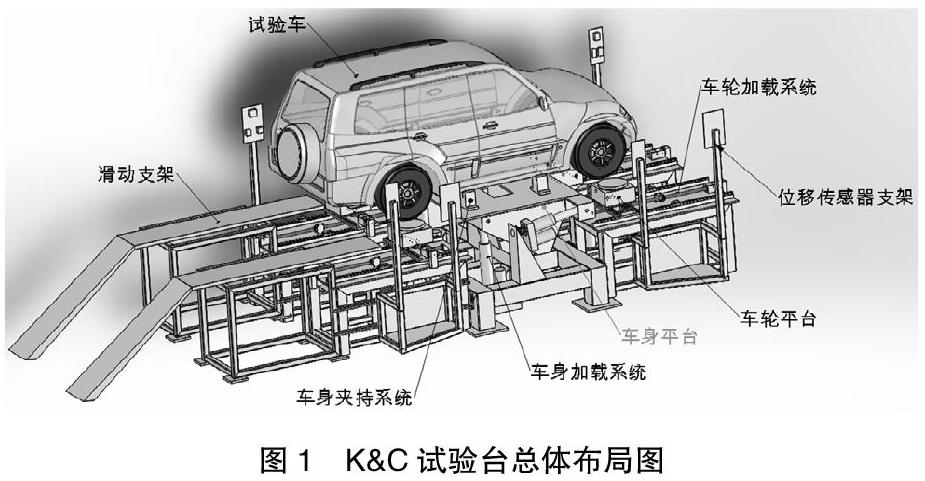
底盘悬架K&C试验台广泛适用汽车整车K&C性能测试,具体包括垂直运动测试、侧向柔度测试、纵向柔度测试、侧倾运动测试、回正力矩测试、转向运动测试等试验内容。试验台还需具备车轮轴距轮距自动调整以及车辆自动对中等功能。使用环境为试验室内常温环境下,设备台架布局于试验现场。主要构成包括车身夹持系统、车身加载系统、车轮加载系统、方向盘位置与转矩测量系统、车轮定位参数测试系统等。K&C试验台的总体布局图如下所示:
2 电控方案设计
根据底盘悬架K&C试验台测控需求分析,按照其功能特性可以将试验台的整个电控系统分解为传感器系统、伺服控制系统、信号采集系统、计算机控制系统、电控配电系统五大子系统。
2.1 传感器系统
在测控技术领域里,传感器是一种能把特定的被测信息按一定规律转换成某种可用信号输出的器件或装置。根据测试任务的需要,传感器主要设计布局在四个车轮平台上,每个车轮平台上的传感器包括三分力传感器、位移传感器、角度传感器。三分力传感器安装于车轮平台的内部,实现Fx、Fy、Fz三个方向的加载测量。通过安装在轮毂上的车轮定位轮盘连接六个高精度位移传感器,根据位移传感器变化,解算出角位移与线位移的变化量,测量车轮位置。角度传感器安装在轮毂上的车轮定位轮盘内部,用于测量车轮转角。
2.2 伺服控制系统
伺服控制系统是一种能够跟踪输入的指令信号进行动作,从而获得精确的位置、速度及动力输出的自动控制系统。为在车身加载系统中实现对车身的多自由度加载控制以及在车轮加载系统中实现车轮的定位控制及加载控制,需要考虑设计上采用伺服控制系统来实现需要的功能。伺服控制系统按驱动元件的不同可以分为电气伺服系统、液压伺服系统、气动伺服系统。电气伺服系统根据电机类型的不同又可分为直流伺服系统、交流伺服系统。根据各类伺服控制系统的控制稳定性、控制精度、响应特性等特点,再结合测试台架的具体需求,考虑采用交流伺服方式。
不同类型的测试车辆有着不同的轴距和轮距,四个车轮加载系统需具备根据整车轴距与轮距调节平台位置,进而准确定位整车的位置中心的功能,据此每个车轮加载系统设计了三套伺服系统来实现Fx、Fy、Mz三自由度的功能控制。车身加载系统根据功能要求共设计六套电动伺服控制系统。其中三套用于垂直Z方向的运动加载控制;两套用于纵向X方向的运动加载控制,一套用于Y方向的运动加载控制。整体形成一个六自由度加载平面,对车身进行实际工况的加载,同时可以消除车轮加载产生的重力误差,提高测量精度。
2.3 信号采集系统
信号采集系統主要是自动获得各类传感器信号的系统。基于测试台架的功能需要,传感器主要设计有三分力、位移、角度等。结合设备应用场景,为提高系统的可靠性、稳定性、测量精度,信号采集系统按照分布式设计,将其布局在台架现场,尽量减少线缆长度,与控制计算机通过网线通讯方式连接。位移传感器、角度传感器使用高精度A/B脉冲输出类型,采用NI CompactRIO 分布式测量控制器及测试模块组合实现。三分力、数字量输入输出、电机编码器等,采用BeckHoff嵌入式控制器及其功能模块组合实现。
2.4 计算机控制系统
计算机控制系统主要实现以人机交互的形式来控制测试设备完成各测试任务。计算机控制系统构建测试平台的架构形式很多,根据具体使用场景不同而不同。若测试系统为整体式台架,采集控制线路较短,环境干扰影响较小时,通常适合将采集控制卡集成在计算机内部,如各种ISA卡、PCI卡等。若测试系统为分布式布局,采集控制线路较长,环境干扰严重时,则适合通过网络通信的方式构建控制系统。
基于底盘悬架K&C试验台的使用场景,计算机控制系统通常布置在客户的监控室内,与测试台架的距离较远,使用了较多的伺服电机及驱动器,整体电磁环境较复杂,干扰严重。控制系统需要采用分布式布局,采用工业计算机与NI测量系统和BeckHoff控制系统通过网络通信实现。
2.5 电控配电系统
配电系统是底盘悬架K&C试验台的重要组成,完善的配电系统是保证设备稳定可靠运行的前提,熟悉各类用电负载的技术要求是设计配电系统的关键。在配电设计上需要考虑系统的漏电安全保护,考虑维护检修的便利性,考虑各子系统之间的相互影响,考虑强弱电系统的隔离处理等。
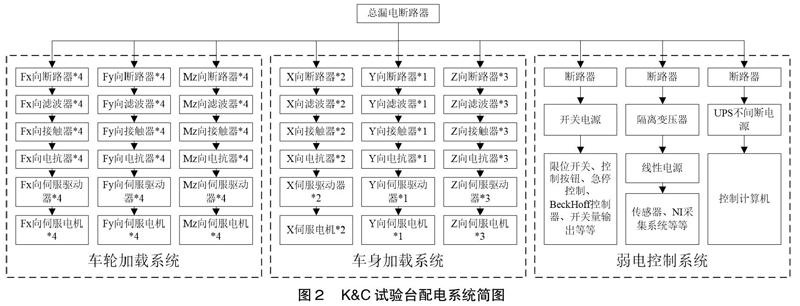
基于其他子系统的设计,配电系统中强电部分主要包括四个车轮加载系统的Fx/Fy/Mz方向的伺服电机系统、车身加载系统的X1/X2/Y/Z1/Z2/Z3伺服电动缸系统,共计18套伺服控制系统。弱电部分主要包括各传感器、信号调理、分布式采集系统等。配电系统简图如下:
3 信号抗干扰处理
干扰信号是指对有用信号的接收造成损伤的信号。干扰信号按其来源不同可以划分为外部传导干扰、外部辐射干扰、内部传导干扰、内部辐射干扰。传导干扰是指通过导电介质把一个电气网络中的信号耦合到另一个电气网络,辐射干扰是指干扰源通过空间把其信号耦合到另一个电气网络。为提高测试台架的测量精度、稳定性、可靠性。必须采取合理的抗干扰措施,减小干扰信号对测量系统的影响,同时也需要尽可能降低系统自身的干扰信号对外部环境的影响。
3.1 外部传导干扰
外部传导干扰的主要途径是设备电源进线。国内通常设备配电采用的是三相五线制。干扰信号通常为50Hz电源中的谐波干扰,其主要来源于供电网络中的其他用电设备。针对此类型的干扰,需要在配电设计中使用隔离变压器,这样也可以防止系统内部的谐波干扰输出影响供电网络。
3.2 外部辐射干扰
外部辐射干扰的主要途径是整个空间环境。辐射干扰源通常分为自然干扰源和人为干扰源两大类。自然干扰源主要来源于大气层的天电噪声、地球外层空间的宇宙噪声。人为干扰源主要来源于机器设备发射出的电磁信号,其中有部分是专门发射的电磁信号即有意发射干扰源,通常包括广播、电视、导航等。另一部分为在完成自身功能的同时附带发射的电磁信号即无意发射干扰源,通常包括输电线、变频器及电机、伺服驱动器及电机等。针对此类型的干扰,需要对台架及柜体做可靠接地。
3.3 内部传导干扰
内部传导干扰主要来自伺服驱动器及伺服电机。针对此类型的干扰,需要在配电设计中伺服驱动器必须使用噪声滤波器以及电抗器,以消除其工作时产生的谐波干扰耦合到弱电系统中,同时也需要在弱电配电中加入隔离变压器做进一步的隔离处理。
3.4 内部辐射干扰
内部辐射干扰也主要来自伺服驱动器及伺服电机。为解决其工作时产生辐射干扰,需要将伺服驱动器等强电系统和信号采集等弱电系统隔离布局安装,整个设备的强电和弱电要分开布线,且留足够间距,伺服驱动器与伺服电机间的电缆需要采用多层屏蔽电缆。信号采集系统的电缆也要采用多層屏蔽电缆,多层屏蔽电缆还需可靠接地,关键信号做信号隔离处理,且选择高品质的元器件。
4 结语
底盘悬架K&C试验台研制成功后进行了广泛的推广及应用。满足了广大的自主品牌汽车企业的汽车研发需求,目前已经取得了不错的市场业绩。在研发过程中,学习和总结的相关测试设备开发经验可以很好地应用在其他测试设备开发中,对提升整个研发团队的知识水平以及技术研发能力起到很好的促进作用。
参考文献:
[1]王伯雄.测试技术基础(第2版)[M].北京:清华大学出版社,2012(04).
[2]韩九强,张新曼,刘瑞玲.现代测控技术与系统[M].北京:清华大学出版社,2007(09).
[3]徐义亨.工业控制工程中的抗干扰技术[M].上海科学技术出版社,2010(01).
[4]孙传友,李涛.测控系统原理与设计[M].北京:北京航空航天大学出版社,2014(08).
作者简介:龚杰(1979-),男,四川内江人,硕士研究生,中级职称,研究方向:检测技术与自动化装置。
