CAN通信在BMS中的研究与应用
2019-10-21曾富豪刘润琴董婷
曾富豪 刘润琴 董婷

摘 要:文章基于英飞凌多核单片机的MultiCAN+模块,阐述了相关寄存器的作用,设计了CAN通信的硬件电路,并对软件设计的流程做了详细的说明。另外通过实验的方式验证了CAN通信硬件电路的可行性以及底层软件代码的正确性。
关键词:英飞凌;MultiCan+;Hightec
中图分类号:TN108.7 文献标识码:A 文章编号:1671-7988(2019)12-49-03
Abstract: This article is based on the MultiCAN+ module of Infineon multi-core microcontroller, explain the related registers Functions, designed the hardware circuit of CAN communication, and detailed the process of software design. In addition, the feasibility of CAN communication hardware circuit and the correctness of the underlying software code are verified by experiments.
Keywords: Infineon; MultiCan+; Hightec
CLC NO.: TN108.7 Document Code: A Article ID: 1671-7988(2019)12-49-03
引言
英飞凌中的TC26x B-Step系列的单片机中的MultiCAN +模块含有5个CAN节点,使得CAN通信在汽车中的应用稳定,可靠,传输速度快,本为所使用的BMS是根据某汽车公司的设计要求,自主研发的一款BMS,并且已经完成量产,且已经投入到该汽车公司中使用,以下重点介绍该BMS中CAN通信的部分。
1 CAN通信硬件电路设计
本文中使用的CAN總线收发器采用AMIS42665TJAA1 RG该收发器在信号输入时具有较宽的共模电压范围,而且电磁敏感性等级高,另外输出信号产生的电磁辐射低,该收发器是一种新型的收发器,该BMS的CAN通信硬件电路如图所示:
2 CAN通信模块软件设计
2.1 CAN初始化
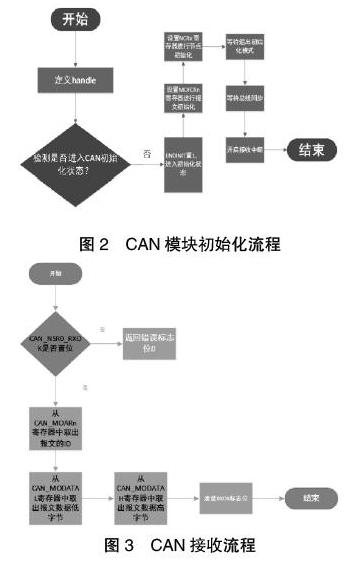
CAN 初始化包括三部分,模块初始化,节点初始化以及报文初始化,在完成这三个部分的初始化之前得先定义相关的全局变量也就是相关的handle,在完成上述操作后配置模块初始化的参数,节点初始化的参数以及报文初始化的参数,模块初始化的配置主要有时钟频率的选择等,节点初始化的配置主要包括节点的选择,回环模式的选择,相应输入输出的引脚设置等,报文初始化的配置主要包括帧格式的选择,消息体的ID设置以及数据发送长度等,相应的程序流程图如图所示:
2.2 CAN 底层接收
数据接收过程首先要判断CAN节点寄存器接收标志位是否置位,如果置位则从报文相关寄存器中取出报文的ID与数据,其中数据高低字节分别放在CAN_MODATAL和CAN_MODATAH寄存器中,接收完成后将清除RXOK标志位,报文对象接收流程图如图所示:
2.3 CAN底层发送
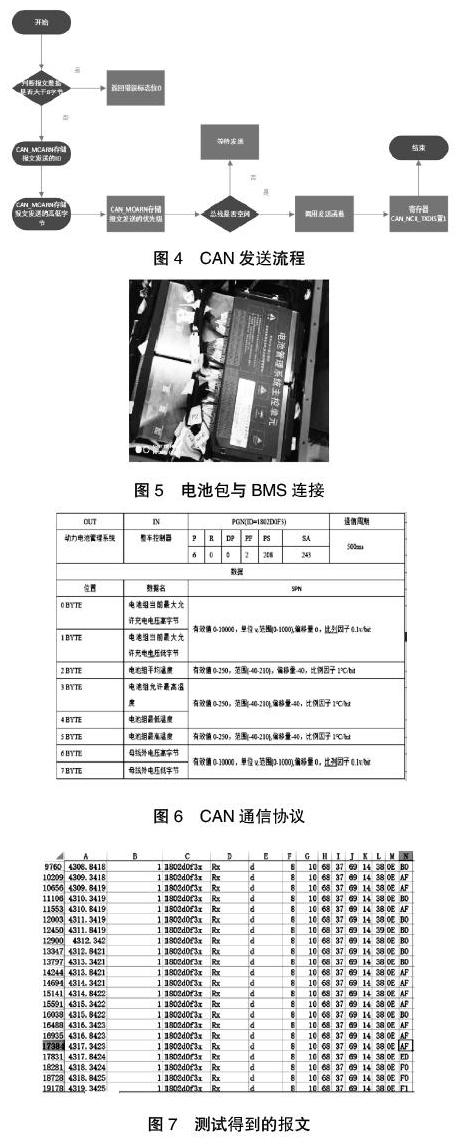
数据发送前,需要配置好报文的相关参数,如报文由哪个节点发送,报文的id,报文的发送状态,其中报文的id存储在报文对象n仲裁寄存器MOARn的ID位中,配置完成之后调用集成完成的发送报文函,该函数可以返回总线的状态,用以判断总线是否处于空闲状态,如果总线处于空闲状态,则发送下一帧报文,直到将所有报文发送完毕,CAN节点将不再进行发送报文,也就是表示所有报文发送完成。报文对象发送流程图如图所示:
3 CAN通信实验验证
下图所示为电池包与主控板之间的连接示意图,该电池包一共有25个模组,每个模组都含有4节单体电池,25个模组串联而成,一共有100节单体电池。
3.1 BMS与整车控制器之间通信测试
通过CANtest软件采集到的BMS与整车控制器之间通信的报文如图所示:
1802d0f3是BMS与整车控制器之间的通信ID,表示的是该消息由整车控制器发送,由BMS接收,其中数据10 68 3A 69 14 38 0E B0代表着发送数据的Bit0-Bit7,报文解析根据如下公式而来:物理值=总线值x比例因子+偏移量,举例如下:数据字节10和68根据以上协议分别代表着电池组当前最大允许充电电压高字节和充电电压低字节,十六进制数1068转换为十进制数为4200,再用4200x0.1=420,与上位机检测到的数值420v一致,验证了BMS与整车控制器之间的通信正常,其余的报文解析与上述方法一样。
3.2 BMS与非车载充电机之间的通信测试
BMS在充电开始前,电池的状态参数如下表1所示,充电电流为13.79A,充电过程使用的电池是三元锂电池,工作电压为3.5v-4.2v,充电时的参数如下表2所示,充电结束后的参数如下表3所示:
4 总结
本文以英飞凌单片机TC265为基础,重点研究了其中MULTICAN+模块的应用,设计了CAN通信的硬件电路,编写了CAN底层代码,并在实验部分验证了BMS与整车控制器的通信,BMS与非车载充电机的通信,实验结果表明,根据整车厂的协议,CAN通信能够很好的达到通信要求。
参考文献
[1] 英飞凌单片机TC265手册.
[2] 周幸.电池管理系统中CAN通信技术的应用研究[D].湖南大学, 2017.
[3] 麻金龙.基于英飞凌XC2785的电动汽车电池管理系统设计[D].天津大学,2014.
