基于Cruise和Simulink的纯电动车联合仿真分析
2019-10-21邓建明龚循飞于勤李应华易健
邓建明 龚循飞 于勤 李应华 易健

摘 要:在国家节能减排的大背景下,电动汽车应运而生。电动汽车的续航里程与能量消耗率是衡量电动汽车成熟水平的关键指标。文章提出一种联合仿真分析方法:首先对动力总成系统主要零件进行数字化建模,应用MATLAB/ Simulink建立了整车控制策略模型,并应用 AVL CRUISE 软件建立了原型车的整车模型,然后通过MATLAB_DLL接口模块,实现了MATLAB/Simulink和CRUISE软件的联合仿真,最后通过仿真计算和实车测试对比,结果表明:该方法可以快速迭代优化整车控制策略并最终达到新能源车型的动力性和经济性指标。
关键词:电动汽车;Cruise;Simulink;参数匹配;仿真分析
中图分类号:U469.72 文献标识码:A 文章编号:1671-7988(2019)12-15-02
Abstract: In the context of national energy conservation and emission reduction, Electric Vehicles came into being. The driving range and energy consumption rate of electric vehicles are the key indicators to measure the maturity level of electric vehicles. This paper proposes a Co-simulation analysis method: firstly, model the main parts of the powertrain system digitally, and establish a vehicle control strategy model with MATLAB/Simulink, and build a prototype model of the prototype vehicle using AVL CRUISE software, and then by MATLAB_DLL interface, which realizes the Co-simula -tion of MATLAB/Simulink and CRUISE software. Finally, the comparison between simulation results and real vehicle test shows that the method can optimize the vehicle control strategy quickly and iteratively and finally reach the Power & Economic performance indicators of the new energy vehicle.
Keywords: Electric Vehicle; Cruise; Simulink; Parameter Matching; Simulation Analysis
前言
目前,電动车在政策支持与技术创新的双重助推下发展迅速,业内普遍认为的原因[1]:一是电动汽车在解决环境污染和能源短缺等问题方面具有优势;二是目前我国电子商务产业促进了物流车辆的应用。所以电动物流车具有很大的发展潜力。
CRUISE[2]是一款在业界功能最强大、最稳定以及适用性最广的整车和传动系统性能分析的仿真工具;MATLAB/ Simulink[3]是MathWorks公司最著名的控制策略开发工具。本文结合两者的优势进行了联合仿真分析。
1 整车参数及性能目标
整车尺寸是:5305×1860×1785mm,质量:3200(最大)/2000(整备),主要性能目标是续航里程(NEDC):>300km,百公里加速小于14s。
2 总成参数匹配
2.1 驱动电机的参数匹配与选型
根据行业调研结果和车型要求,本文涉及的车型选用永磁同步电机。根据最高车速和最大爬坡度计算所需的电机峰值功率,根据常规车速、额定转速与峰值转速的要求,分别得到电机额定转速和峰值转速为1146转和4500转,然后根据额定转矩和额定转速计算额定功率为60kW,依据最大爬坡度计算电机峰值功率为120kW。
2.2 动力电池选型与参数匹配
本文选取三元锂电池作为动力电池。根据电机额定电压范围得电池组的电压为571V,单个三元锂电池的电压是3.66V,所以需156个电池串联。电池能量可以通过下列的公式来进行计算:
计算得W=57.1 kW·h。可知整车所需的串联电池组能量为571V×100Ah=57100W·h,因此为了满足汽车的动力性要求,动力电池总能量取57.1kW·h。
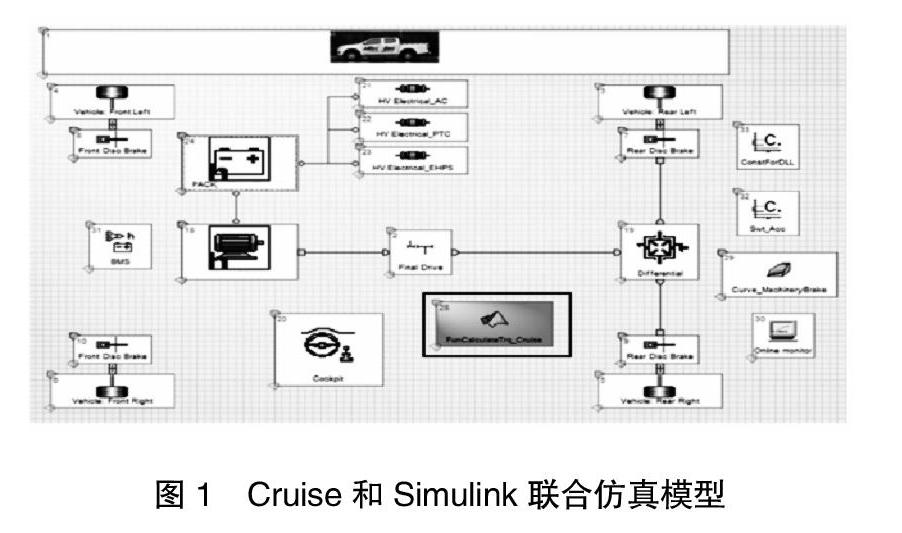
依据电机外特性及电池电化学特性参数,结合整车参数和性能目标,运用Cruise 软件建立电动物流车的整车模型,包括动力电池、驱动电机、主减速器、差速器、制动器、车轮以及控制策略模型(利用Simulink建立,见图1黑色方框)等模块。图1是联合仿真的软件界面,运用Cruise软件的联合仿真接口MATLAB_DLL,最终建立的电动车联合仿真模型如上图1所示。
联合仿真模型建立以后,本文选择NEDC循环工况对模型进行仿真分析。在Cruise进行基于NEDC工况的仿真实验,续航里程的仿真结果为329 km。
3 实车验证及结论
3.1 仿真及实车验证结果
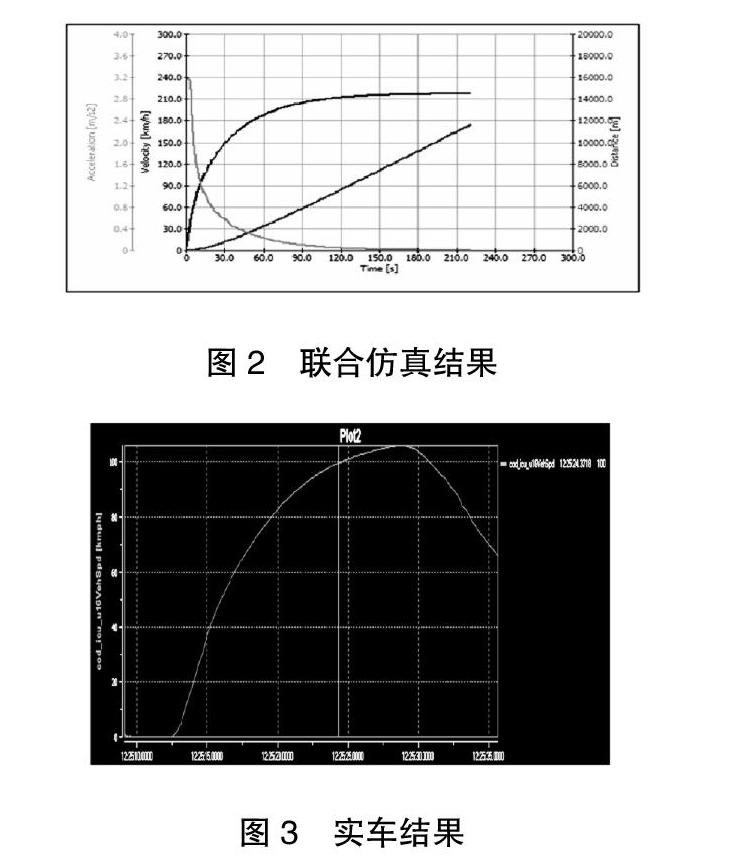
根据制定的车辆运行策略,车辆行进在全油门百公里加速的工况下,其仿真结果如图2所示,该工况下0-100km/h百公里加速时间是13.1s,实车验证结果如图3所示为12.81s。
3.2 结论
联合仿真主要计算结果和实车测试结果对比,如表1,结果表明:该方法可以快速迭代优化整车控制策略并最终达到新能源车型的动力性和经济性指标。
参考文献
[1] 任田园,宋伟萍等.基于Cruise的电动汽车仿真分析[J].汽车实用技术,2018(21):3-4.
[2] 李斯特技术中心(上海).AVL Cruise User's Guide[G].2011.
[3] 孙忠潇.Simulink仿真及代码生成技术入门到精通[M].北京航空航天大学出版社2015.
